津冀沿海“空陆海”综合地质调查与观测体系建设
2021-02-22文明征田立柱胡云壮
李 勇,文明征,杨 朋,田立柱,胡云壮,王 福
(1.中国地质调查局天津地质调查中心,天津 300170;2.华北地质科技创新中心,天津 300170;3.中国地质调查局海岸带地质环境重点实验室,天津 300170)
海岸带是海洋与大陆交互作用的狭窄地带,是地球表层岩石圈、大气圈、水圈及生物圈相互作用最为频繁以及变化最为敏感显著的地带[1,2]。海岸带作为人类生存和社会发展极为关键的区域,其所存在的环境地质问题也非常的突出,海岸带生态保护修复、重大工程地质安全和国土空间规划面临着严峻挑战。以津冀海岸带为例,海平面上升、地面沉降、风暴潮、海岸侵蚀、航道淤积、海底浅层气、环境污染、生态破坏及海水入侵等自然环境地质灾害发生较为频繁[3~10],严重影响了该区社会经济的发展,因此在津冀海岸带开展海岸带地质环境综合调查和监测具有非常重要的现实意义。
早期的海洋地质环境调查主要是对海底地形地貌及环境演变等内容进行调查和研究。但随着沿海地区社会和经济的不断发展和进步,各种地质环境问题和矛盾越来越突出,需要调查和研究的内容越来越广泛,这其中包括了海洋水动力、水体污染以及生态环境等众多方面。传统的海洋地质环境调查和监测大多手段单一,所关注的问题也较为局限,调查、监测和研究缺乏整体性、全面性和系统性。有鉴于此,本文以津冀沿海为研究区,针对海岸带的特殊地理位置和存在的地质环境问题,建立了“空陆海”综合地质调查与观测技术方法体系。下文将从海洋地质环境年际调查、定点原位实时观测、临时原位实时观测、无人机和无人船观测以及海洋地质环境数值模型等5个方面展开论述。
1 海洋地质环境年际调查
海洋地质年际调查本文主要是指在适合出海调查的时间段(渤海区域一般为每年5月到10月),利用各种船载海洋地质环境调查设备从海洋底部一直到海洋表面进行年际有规划的、系统的调查,调查内容主要包括非接触式地球物理调查、海洋取样钻探以及海流测量。
海洋综合地球物理调查技术主要采用单波束测深、多波束测深、旁侧声纳扫描、浅层剖面测量以及单道地震勘查等方法[11,12]。其中单波束测深主要用于测量海底地形的起伏变化,多波束水深测深相比单波束测深具有测量范围大、高精度、高密度和高效率等特点。旁侧声纳扫描主要用于海底地貌和底质特征的探测。调查扫描宽度可根据水深状况和项目任务需求而定。浅层剖面仪主要用于探测海底浅地层的分布,一般为海底50 m以内浅部以及潜在地质灾害等。单道地震主要用于勘查海底100 m以内的构造特征、地层分布及潜在地质灾害等[13]。单波束测深仪、多波束测深仪及浅地层剖面仪如图1所示。调查过程中可根据实际执行的任务需求选择数项上述调查方法开展同步作业。
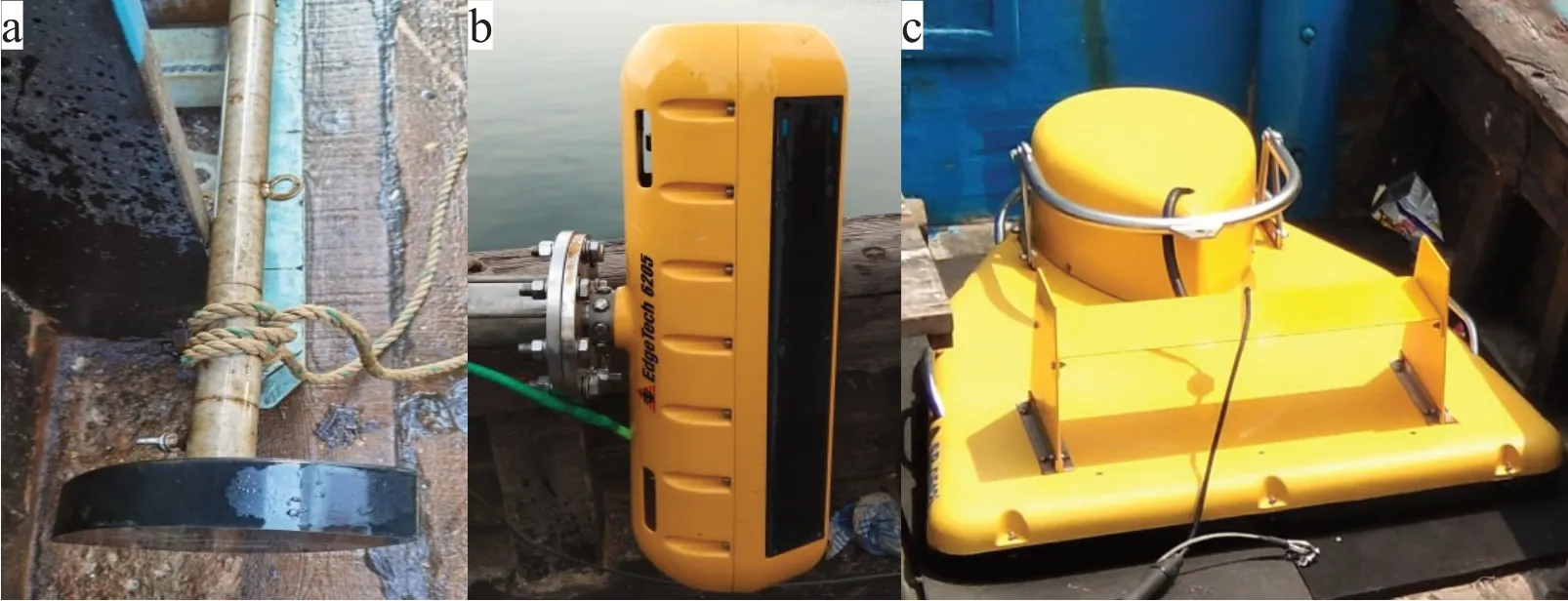
图1 地球物理调查主要仪器设备Fig.1 Main equipment for geophysical survey
海洋取样分为海水取样和底质取样。海水取样的主要目的是为了通过实验测试所采集的样品查明调查区的海水化学环境特征和水污染状况,从而为污染控制、近岸水产养殖等提出科学性指导和建议。海水取样可分层进行,层位根据任务目标规定的实际需求来确定。海底底质取样查明海底沉积物搬运和重组的变化规律,分析和预测海洋地质环境的变化规律和趋势。海洋底质取样分为表层样和柱状样,取样的方法很多。其中表层取样方法主要有抓斗取样、箱式取样、多管取样以及拖网取样等。柱状样取样主要有重力取样、活塞取样以及海底浅钻。海底地质钻探(浅钻)主要采用海底浅层岩心钻取机、液动海底冲击式勘探器、回转式海底取样器等不同的方法来获得海底浅部的地层岩心[11,12]。
海流观测是海洋调查项目中海洋水动力方面重要的观测要素[14]。船载走航式声学多普勒流速剖面仪(ADCP,图2)可以在船只走航过程中对经过海区的海流进行连续的剖面观测,具有不扰动流场、测验历时短、测速范围大、充分利用航渡时间等优点。在船只走航过程中,以垂直流速剖面反映经过海区的海流情况,实现海流剖面的快速有效探测,从而为海洋科学研究提供大量一手原始数据。

图2 走航式ADCPFig.2 Vessel-mounted ADCP
2 定点原位实时观测
津冀海岸带海洋地质环境综合调查与观测体系除了海洋地质环境年际调查,还有一个非常重要的定点原位实时动态观测系统。短时间尺度观测(一般25小时)通常只能提供海洋过程中的片段,缺乏对天、月、季及年等各种时间尺度的海洋环境变化过程的正确认识,因此非常有必要构建适合长时间尺度观测的定点原位观测系统。
定点观测系统目前主要包含两个部分:潮汐水位观测网和综合观测平台。潮汐水位观测主要是为研究海平面上升以及测深修正提供水位数据。目前已经在津冀沿岸包括河北滨州港、黄骅港、天津南港工业区、天津港、大神堂自然保护区、河北曹妃甸、乐亭、昌黎以及秦皇岛新港等地分别建立了潮汐观测站。下图3所示为其中滨州港和南港两个潮汐观测站的建站样式,通过太阳能和大容量蓄电池进行供电。
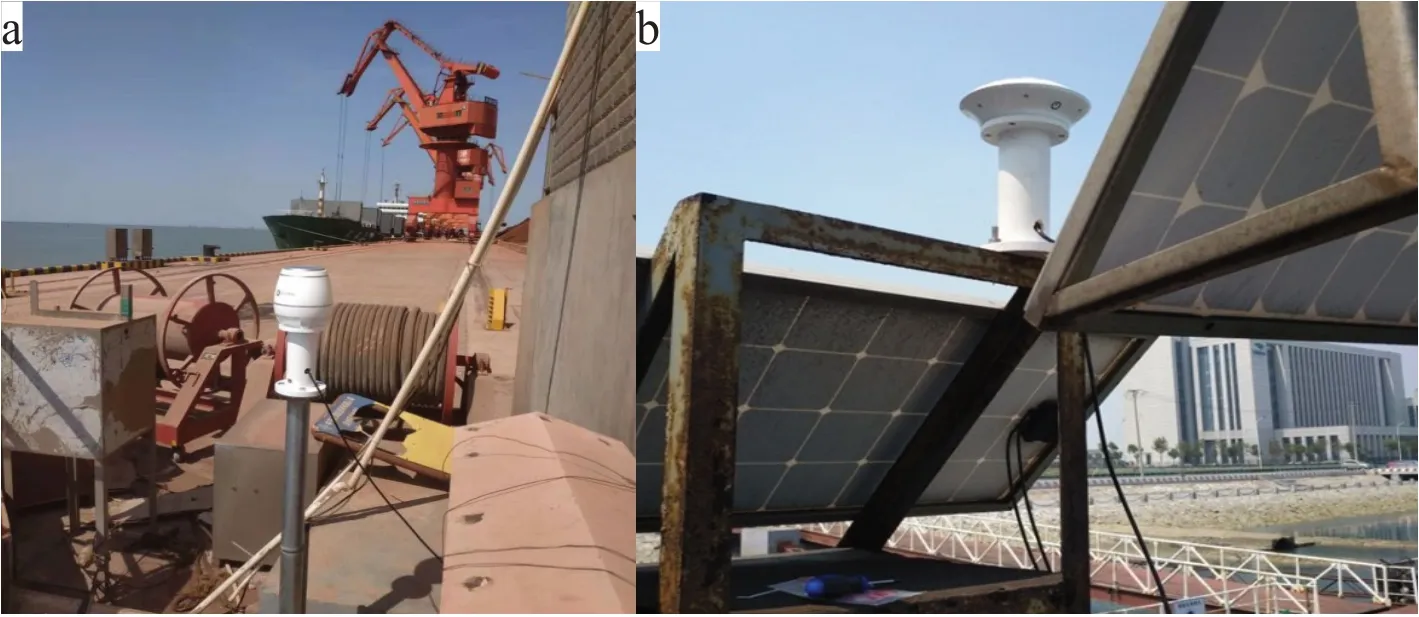
图3 潮汐观测平台Fig.3 Tidal observation platform
至于综合观测平台,搭建目的主要是为研究风暴潮、海岸侵蚀、航道淤积、环境污染及生态破坏等自然环境地质灾害提供观测数据,支撑相关重点研究工作的开展,从而为地方政府和单位的决策提供科学依据。目前已经在天津大神堂自然保护区以及河北国际旅游岛中的祥云岛建立了两个定点观测平台。平台仪器搭载情况如图4所示,在祥云岛附近海域建好的海上观测平台如图5所示。平台搭载的观测设备主要包括:风速风向传感器、气压传感器、温湿度传感器、波浪传感器、ADCP、浊度仪、海底侵蚀淤积仪及温盐多参数传感器等,可监测海上风、温、湿、压、降水等气象要素以及海流、海浪、海温、泥沙以及水质等海洋环境要素。

图4 定点观测搭载仪器Fig.4 Measuring instruments for fixed-point observation

图5 定点综合观测平台Fig.5 Fixed-point observation platform
3 临时原位实时观测
上述定点原位实时动态观测存在一个明显的致命弊端,那就是测量点位固定,缺乏对各种不同空间位置海洋环境变化过程的观测,因此需要引入临时原位动态观测平台,在时间和空间上相互补充和完善。
临时原位观测平台结构分为上、中、下3部分,如图6所示。上部为一个整体的框架结构,尺寸方面,长宽均为1 m,高为0.7 m,主要用于固定所搭载的仪器设备。中部为4根支撑杆将上部框架结构撑起,为观测仪器提供足够的观测空间,同时防止各仪器之间的相互干扰,支撑杆底部通过螺栓安装圆形底座。圆形底座上可以根据观测海域水动力条件及沉积物类型调节配重数量,用以增加观测平台的稳定性。此外,在每个圆形底座下面配一根长度为0.5 m的防滑钢针,观测系统布放完成后防滑钢针插入沉积物内部防止观测平台发生侧向滑移[15]。

图6 临时海底原位观测平台Fig.6 Temporary in-situ observation platform
这套海底原位观测平台搭载的仪器设备如图7所示。主要包括:多普勒流速仪(ADV及ADCP),用于测量底边界层高频流速;波潮仪,用于波浪、潮汐观测;声波蚀积仪(AA400),主要用于测量海床起伏,沉积物侵蚀、淤积测量;高密度悬浮泥沙剖面测量仪(ASM),用于底层悬浮泥沙浓度测量;多参数浊度仪,用于底层悬浮泥沙浓度测量。平台观测时间可长可短,一般海洋水动力观测要求最短25小时,根据项目需求,更换大容量锂电池能连续观测1~3个月。

图7 临时原位观测平台搭载的仪器设备Fig.7 Equipment carried on the temporary in-situ observation platform
4 无人机和无人船观测
海岸带中的潮滩是海陆动力相互作用的敏感区域,具有重要的生态系统保护、海岸侵蚀防护与社会经济发展价值。随着全球气温升高导致的海平面上升和沿岸人类活动的加剧,潮滩正面临着前所未有的威胁,因此亟需探究潮滩系统形态对环境变化的响应过程,掌握潮滩系统形态的变化规律和趋势。
传统上,通过现场实地测量来研究潮滩形态变化的主要方法有人工跑滩和遥感反演[16,17]。人工跑滩的方法虽然精度较高,但是耗时耗力。遥感反演技术多用于单次监测,难以用于揭示潮滩系统季节性的短期内的动态变化[18]。近些年来,我们在潮滩地形的调查工作中引入无人机低空飞行进行调查,如图8所示。利用无人机倾斜摄影测量技术重复监测研究区域,结合运动恢复结构SFM(Structure from Motion)数值算法,重建潮滩三维点云,从而生成数字高程模型DEM(Digital Elevation Model),籍此分析潮滩滩面侵蚀淤积的变化规律。

图8 无人机观测系统Fig.8 Unmanned Aerial Vehicle(UAV)observation system
不仅是无人机,我们在调查工作中还引入了无人船进行海上地形测量。图9所示的无人船即为水下水上地形一体化测量系统,适合在浅水近岸区域开展作业。测量系统水上部分,采用三维激光雷达传感器来感知岸线及结构物的相对位置及高程。水下部分,采用多波束测深仪进行水深测量。水上水下两部分的测量结果在同一系统中进行实时拼接和输出,非常省时省力。
三维激光雷达传感器是一种主动传感器,使用激光作为探测源,受外界干扰小,可直接获取目标信息,具有测量精度高、测距速度快、测量范围广等优点。多波束如前所述,同样具有测量范围大、高精度、高密度和高效率等特点。两者有机结合在一起,有望促进沿海近岸高精度地形地貌调查工作的开展。
5 海洋地质环境数值模型
上述的调查和观测手段基本都是基于“点”和“线”的形式展开的,实际使用起来不方便,展示的效果也不尽如意。如果在此基础上引入数值模拟技术,就可以将低维度的“点线”基础数据拓展到二维的“面”和三维的“体”,相互补充完善,对于全面、直观展示海洋地质环境调查成果具有非常大的裨益。
地球气候系统是一个统一的有机整体,海洋、陆地与大气之间存在至关重要的相互作用,三者之间无时无刻不在进行着动量、热量以及水通量的交换,这种耦合效应在海岸带区域更为明显和重要。目前为止,李勇等[7,8,18,20]构建了海气耦合计算模型,耦合模型能在更加真实的动力环境下研究大气与海洋之间的相互作用。耦合过程中利用开源的耦合器和网格重建程序实现了海洋模式ROMS(Regional Ocean Model System)和大气模式WRF(Weather Research and Forecasting)之间实时的数据交换,如图10所示。耦合模型可以计算一般乃至极端大气的变化过程(如热带风暴和温带风暴)、海洋水动力(包括潮汐、波浪)、泥沙输运及海床侵蚀淤积变化过程。耦合模式根据实际需求也可以进行解耦计算,比如不对大气、海洋中的波浪和泥沙进行计算,只对海洋中的潮汐进行数值模拟。

图10 WRF与ROMS耦合示意图[19]Fig.10 Schematic diagram for WRF and ROMS coupling[19]
耦合模型中的WRF被称为新一代的中尺度天气预报模式,是由美国国家环境预报中心、美国国家大气研究中心、地球系统试验室以及俄克拉荷马大学等机构联合开发。WRF因其完全开放、可移植性强、更新快等特点在国内外得到了广泛应用[21,22]。耦合模型中的ROMS模式系统基于三维非线性的斜压原始方程,由美国罗格斯大学与加利福尼亚大学洛杉矶分校两校合作完成,利用Fortran 90/95语言编写。ROMS在水平方向上同样采用正交曲线网格,垂向采用跟随地形和自由表面的可伸缩坐标系统。在开边界条件上,ROMS提供了多种算法可供选择,使用起来非常灵活,应用范围广[23]。
数值模拟成果方面,李勇等分析总结了渤海风暴潮的发生特征,基于所构建的海气耦合模型模拟了发生在渤海,尤其是渤海湾的不同类型风暴潮,主要包括:台风风暴潮、温带风暴潮和寒潮[7]。研究表明:相比非耦合模式,耦合模型能够更好地模拟出渤海湾风暴潮期间温度场、风场、潮位以及潮流场的变化特征,具有很好的推广应用价值。
此外,为了验证观测数据和数值模型的可靠性,本文采用2019年10月1日~2日南港工业区附近的30小时海流观测数据与数值模型结果进行了比对,主要对比了潮位及朝流。潮位验证结果如图11所示,潮流流速及方向对比如图12所示。从对比结果可以看出,对应30个小时观测点上模拟得到的潮位、潮流流速、流向与实测数据基本吻合。
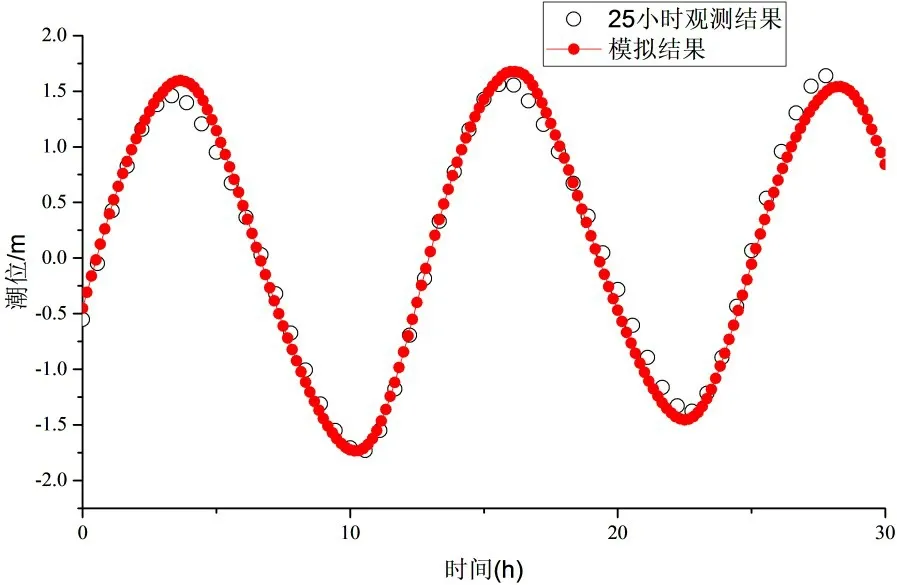
图11 临时观测站潮位数据与数值模拟结果对比Fig.11 Comparison of tide level between observation station and numerical simulation
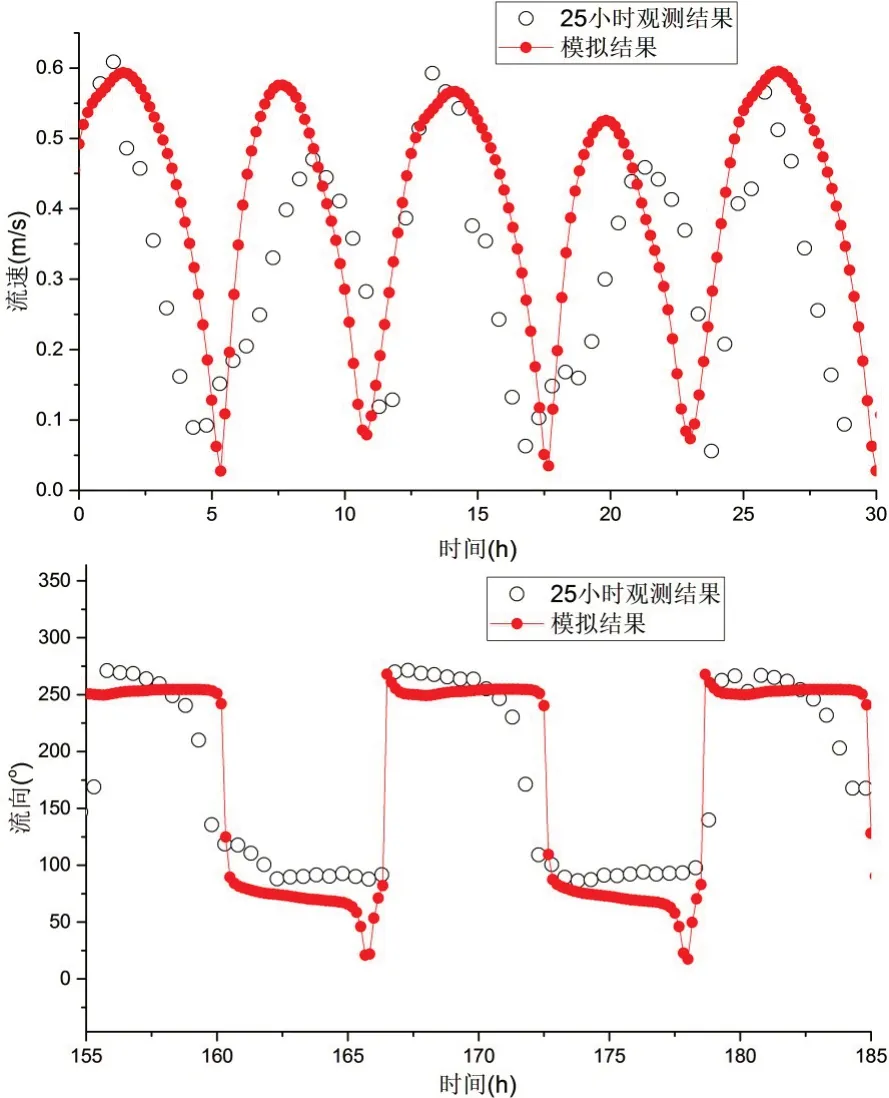
图12 临时观测站海流数据与数值模拟结果对比Fig.12 Comparison of ocean current between observation station and numerical simulation a.流速验证;b.流向验证
6 未来工作展望
海洋调查方面,将基于引入的多波束及水上水下一体化测量系统,对近岸水深较浅的区域开展年际常规调查,尤其关注重点围海造陆区附近的水深变化及侵蚀淤积过程。一方面可以为地方政府部门开展近岸工程建设提供科学指导,另一方面也能为数值模型提供一手的地形地貌数据,使数值模拟条件与实际情况更加地吻合,从而取得更为可信的预测结果。此外,开展海岸带海洋环境地质调查工作的过程中还应不断完善现有技术方法,开拓新的应用领域,开展新技术方法的研发、应用和推广。
海洋实时观测方面,将在渤海近岸海域内继续补充定点原位实时观测平台,继续完善临时原位实时观测平台的安全性和实用性。近些年台风过境渤海尤其是渤海湾的次数越来越多,争取获得几次关键台风风暴潮期间的海洋与大气响应数据,以此分析极端天气条件下津冀沿岸重点围海造陆区附近海床的侵蚀淤积规律以及岸线稳定性状态,为地方政府防灾减灾提供一手数据和科学建议。
数值模型方面,短时间尺度上,研究极端天气条件近岸泥沙的起动和输运规律,分析年际近岸人工结构物周边泥沙的冲淤平衡过程,为近海工程的设计、施工以及安全运行提供科学依据;长时间尺度上,以沉积动力学和动力地貌学为基础模拟近海/浅海区域沉积层序的形成过程,将正演和反演有机结合起来,研究海底地貌的演变规律,从而更合理地引导人类的海洋活动,有助于人类对海洋资源的长期开发和利用。在此基础上,加入地表/地下水,实现海岸带地区海陆空多圈层交互数值模拟系统,并与调查和观测系统相互配合,构建完整的观测预警体系,为沿海地方政府及单位提供全方位支撑。
7 结论
研究初步建立了针对海岸带的“空陆海”综合地质调查与观测的技术方法体系。体系包含了海洋地质环境年际调查、海洋定点原位观测、海洋临时原位观测、无人机和无人船观测及海洋地质环境数值模型等几个部分,其中数值模型能起到锦上添花的作用,将“点”和“线”上调查得到的数据资料拓展到二维“面”和三维“体”,有利于更加全面、直观地展示海洋地质环境调查成果。完整的综合地质调查和观测体系体现了当前调查技术的发展方向,那就是由船载探测技术向近海底、原位观测技术发展,由单一探测技术向立体化、一体化、精细化探测技术发展,由费时费力的全人工调查技术向远程化、自动化及智能化技术发展,以及在调查观测技术的基础上补充模拟预测技术等方向发展。
致谢:本论文得到中国地质调查局和中国国家留学基金委经费资助,在此表示感谢!
