永磁同步电机无传感器矢量控制技术研究
2021-02-18姜如霞
王 金,姜如霞
(江西交通职业技术学院,江西 南昌 330013)
0 引 言
相对于普通交流变频电机,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有效率高、能量密度高、转矩惯量比大的特点以及环保低碳的优势[1]。同时,永磁同步电机克服了绕线同步电机需要励磁绕组、换向器、滑环而带来的限制,具有良好的低速性能。但是,相比于异步电机,PMSM在控制时存在失步问题,因此需要通过转子位置检测或速度检测装置来获得准确的转子位置。当不存在转子速度传感器时,则需要通过其他容易测得的电机非转速信号,如电机参数、定子电压以及定子电流等来获得电机的当前转速或转子位置,构成无速度传感器的PMSM控制器[2,3]。
1 基于滑模观测器的矢量控制方法
滑模观测器通过不连续的控制变换系统结构,迫使系统状态沿着特定路径滑向平衡点,趋于稳定[4]。滑模控制器的原理由下式给出,通过bang-bang控制输出量z控制电流误差趋于0,则电压估计量e~s趋近于真实感应电压es,通过对es的相位判断即可确定转子磁链位置[5,6]。基于滑模观测器的转子磁链观测算法表达式为:
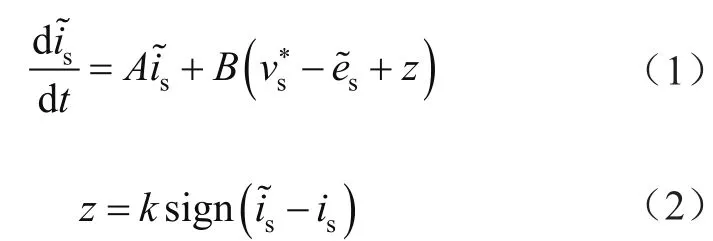
式中,is为定子电流;为电流估计量;为电压估计量;vs*为电机转速;z为滑模控制器控制的输出量,A为,B为。
式(1)和式(2)的离散形式为:
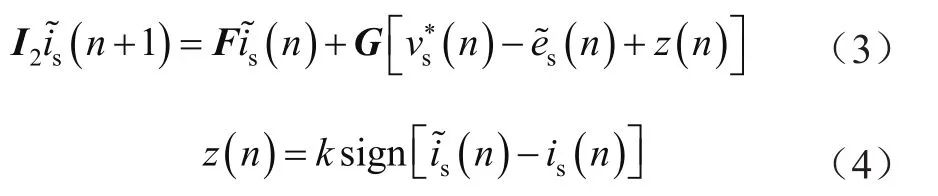
其中矩阵F和G的表达式为:


式中,I2表示2×2的单位矩阵。
转子磁链位置检测算法。转子定位表示PMSM转子静止状态下的转子磁链初始位置检测算法。
其基本原理是根据内置式PMSM的凸极效应造成PMSM转子位置不同时定子电感不同,通过检测电感的不同来确定转子磁链初始位置[7,8]。内置式PMSM具有凸极效应,即Lq>Ld,其中Lq为交轴电感,Ld为直轴电感,记均值电感L=(Lq+Ld)/2,差值电感ΔL=(Lq-Ld)/2,则定子磁链方程可表示为:
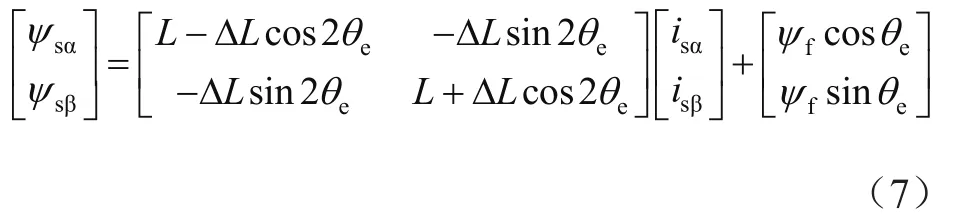
式中,θe为解耦角度;ψf为永磁体的磁链;isα和isβ为电子电流分量;ψsα和ψsb为磁链分量。
当具有凸极效应的电机注入高频旋转电压矢量时,其定子电流表达式为:

定子电流经过的坐标变换为:



式(10)中求取反正切即可得到2θe的值。
当定子磁场方向与转子磁场方向相同,磁场增加,铁芯饱和程度加强,电感减小,反之磁场减弱,铁芯饱和程度减弱,电感加强[9,10]。通过施加与转子磁场同向和反向的定子磁场,比较定子电流上升率即可判断两次施加方法的电感大小,进而判断出转子磁链的N、S极。
2 试验与分析
2.1 系统仿真
为验证本文设计的矢量控制技术对系统的控制效果,在MATLAB/Simulink平台系统搭建仿真模型如图1所示,其中包括转速、位置估算的滑模观测器模块、电流环、转速环控制器、Clark-Park变换及其逆变换模块、SVPWM模块和逆变模块。
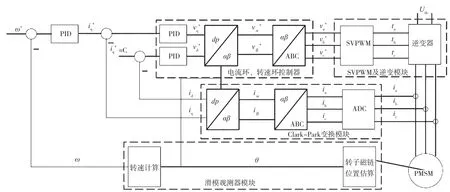
图1 基于滑模观测器的矢量控制
关于电机估算速度、a、b、c三相电流的仿真结果如图2所示。
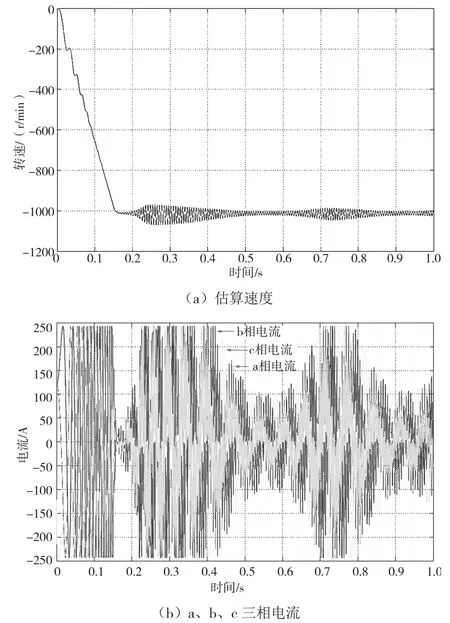
图2 仿真结果
2.2 硬件试验设计
本文基于DSP硬件资源搭建了永磁同步电机及无传感器矢量控制硬件系统,对所提出的控制方法进行了实验验证。
PMSM控制系统分为主电路、驱动电路(驱动板)和控制电路(控制板)3个部分。其中驱动板主要包括辅助电源模块、电压电流温度采样模块以及IGBT的PMW驱动电路,辅助电源模块提供控制板工作所需的5 V、+15 V、-15 V电源以及隔离24 V电源。控制板主要包括电源模块、DSP最小系统、EEPROM电路、数字输出电路、继电器输出电路、硬件过流检测电路、故障锁存及解锁电路、PWM使能控制电路、模拟输入信号调理电路、模拟信号输出处理电路与通信电路等部分。
该控制系统速度检测采用正交编码器,控制板上设计正交编码器信号处理电路,正交编码器供电电源选为10 V,输出信号电平也是10 V。编码器输出信号通过施密特反相器HEF50106BT进行信号整形,故HEF50106BT供电电压选用10 V。由于HEF50106BT输出信号通过高速光耦HCPL-0601进行电平转换,因此输出电平为3.3 V,与DSP数字电平匹配。
2.3 结果分析
本文对设计的控制系统在电机拖动实验平台上进行了实验研究,实验结果如图3所示,分别为电机转速达到480 r/min时的电压波形和转子位置波形。
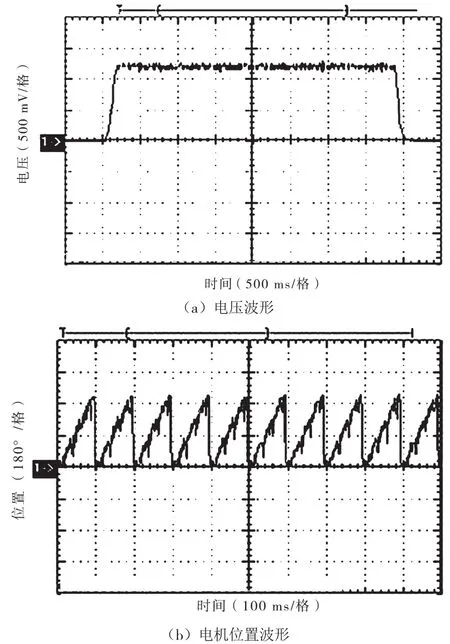
图3 实验结果
3 结 论
本文提出了一种基于滑模观测器的无传感器矢量控制技术,设计了一种转子磁链位置估算检测算法,在MATLAB/Simulink中构建了仿真模型,搭建了永磁同步电机无传感器矢量控制的硬件平台,并在电机拖动的负载实验平台进行实验,通过实验验证转子位置检测算法响应速度较快、稳定性好,系统有效实现了永磁同步电机的无传感器控制。
