基于自适应模糊PID的导弹控制系统
2021-02-18王小东周春桂王志军王利锋张凯奇
王小东,周春桂,王志军,王利锋,张凯奇
(1.中北大学机电工程学院,山西 太原 030051;2.湖南云箭集团有限公司,湖南 长沙 410100)
0 引言
现代武器家族中,导弹的地位十分重要。为保证导弹稳定飞行,对目标对象进行实时跟踪,发出正确的修正偏差指令,操纵导弹改变飞行姿态,对导弹控制系统的研究极其重要。文献[1—2]指出智能控制是当前运用的最多的控制方法,非常适用于导弹这类非线性的控制系统。文献[3]提出一种PID参数优化的方法,通过优化参数提高导弹控制精度,但相比于智能控制,该方法控制效果不是很理想。文献[4]以常量定义了误差和误差变化率,验证了模糊控制理论可以应用于飞航导弹自动控制中,相比于传统PID控制,模糊控制有着更好的控制效果,但是还无法达到自适应的效果。本文针对此问题,将传统PID与模糊控制结合,提出基于自适应模糊PID的导弹控制系统。
1 导弹控制系统结构及自适应模糊PID控制算法
1.1 导弹控制系统结构
导弹控制系统是导弹上自动稳定和控制导弹绕质心运动的整套装置。它的功能是保证导弹稳定飞行,并根据制导指令控制导弹飞向目标。其控制系统主要由控制器、舵伺服机构、弹体等组成,如图1所示。导弹控制的任务就是克服导弹飞行中的各种干扰,实时准确地控制导弹姿态,使导弹自动按预定轨道飞行,因此,导弹控制精度的好坏是导弹飞行成败的关键。
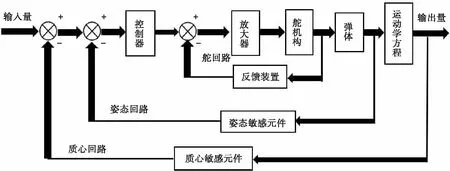
图1 导弹控制系统结构框图Fig.1 Block diagram ofMissile control system structure
控制器是整个导弹控制系统的核心部件,控制器的好坏直接影响导弹控制的精度。由于使用传统PID很难保证有较好的控制精度,然而传统PID又具有较好的鲁棒性和静态性能,因此将模糊控制与传统PID相结合可达到自适应的效果,更好地满足系统要求的性能指标。
1.2 自适应模糊PID控制算法
作为智能控制技术的重要组成部分,模糊控制已得到广泛的应用,并且控制效果明显优于传统PID控制[5-6]。模糊控制器由模糊化过程、知识库、推理决策、精确化计算四部分组成,其控制原理框图如图2所示。
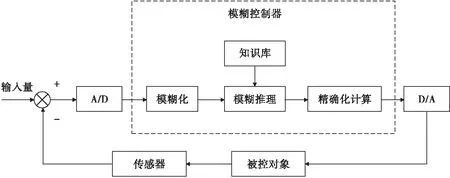
图2 模糊控制原理图Fig.2 Block diagram of fuzzy control
自适应模糊PID算法根据系统所反馈的误差信息,进行在线辨识和修正,可以实现模糊控制规则的自学习并且能在线调整控制器的参数,以便适应外界条件或环境因素的干扰,大大提高系统的控制精度和抗干扰能力,更好满足控制系统所要求的性能标准[7]。
通常以误差E及误差变化率EC作为输入,首先将输入量进行模糊化,得到相应的模糊集合。根据被控对象的控制要求设置语言变量和隶属度函数。1975年扎德(Zadeh)做出了语言变量的定义,用一个五元体来进行表征,即:[X,T(X),U,G,M]。其中X为语言变量名称,U为论域,T(X)表示语言变量值名称的集合,G为语法规则,M为语义规则,用来选取隶属度函数[8]。 模糊推理规则作为模糊控制最核心的部分,通常是一系列的IF…THEN(如果…则)模糊规则的集合,是由专家总结出来的一组模糊条件语句经验和操作技能。常见的方法有扎德(Zadeh)法,马丹尼(Mamdani)法。精确化计算是将推理出的模糊子集转换成对应的精确值,常使用的方法一般有重心法、加权平均法和最大隶属度法等。
在系统的运行过程中根据误差E以及误差变化率EC所反馈的数据与模糊关系进行在线对比,不断调节控制器参数,改善控制器的性能,使得控制效果达到更佳的状态。
2 基于自适应模糊PID的导弹控制系统
本文提出的自适应模糊PID导弹控制系统的设计关键要素包括:确定模糊论域、确定模糊子集和隶属度函数、制定控制规则、选择合适的模糊推理方法和清晰化方法,最后经过清晰化计算得到实际输出量。将模糊控制和PID控制相结合,以解决使用传统PID控制时造成导弹控制精度不高的问题。
1) 确定模糊论域。以误差E以及误差变化率EC作为输入,以比例、积分、微分的变化量(ΔKp,ΔKi,ΔKd)作为输出,输入量误差和误差变化率的论域为(-6,-4,-2,0,2,4,6),输出量ΔKp,ΔKi,ΔKd的论域为(-3,-2,-1,0,1,2,3)。
2) 确定模糊子集和各变量隶属度函数。将输入输出变量都平均划分为7个等级:NB、NM、NS、Z0、PS、PM、PB(负大,负中,负小,零,正小,正中,正大),隶属度函数选择对称的三角形隶属度函数。
3) 制定模糊控制规则。控制器的模糊推理采取IF…THEN模糊规则的Mamdani法推理。在制定模糊控制规则时应遵循以下原则:
当|E|较大时,应选取较大的ΔKp和较小的ΔKd;当|E|不太大时,为了使系统具有较小的超调,ΔKp应取较小些,ΔKd对系统影响较大,应取较小些;当|E|较小时,ΔKp和ΔKi应取得大些。控制规则如表1—表3所示。
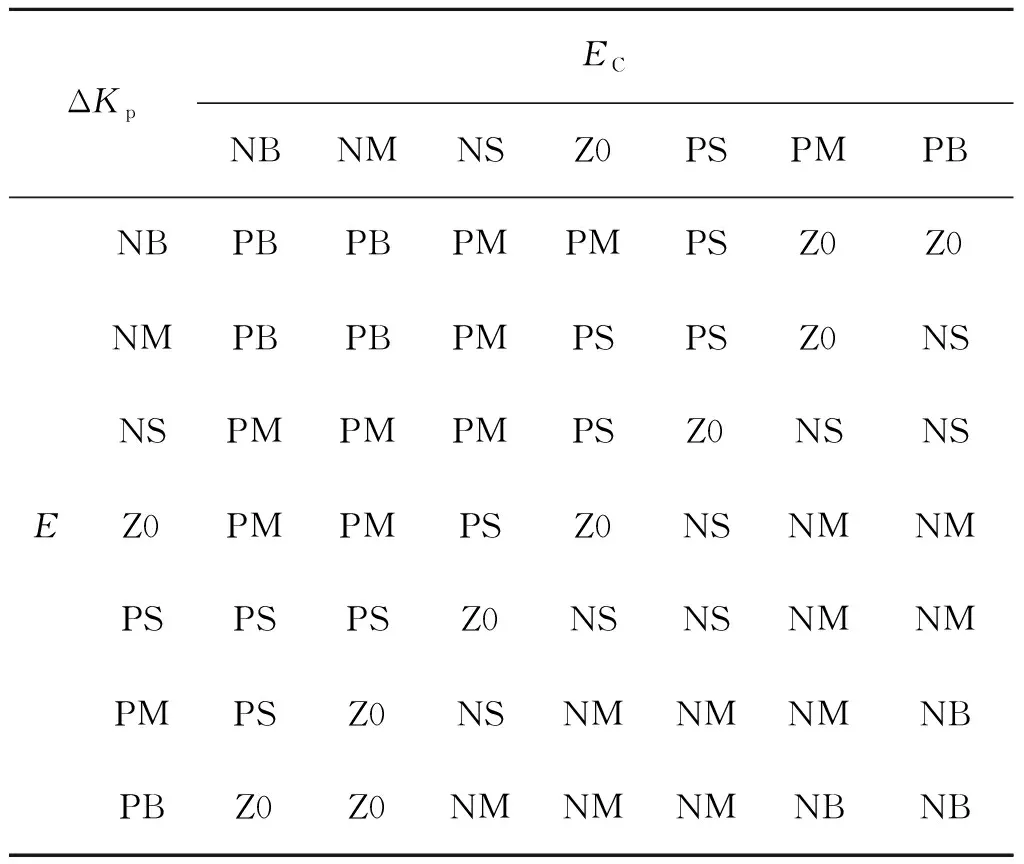
表1 ΔKp模糊控制规则Tab.1 ΔKp fuzzy control rules

表2 ΔKi模糊控制规则Tab.2 ΔKi fuzzy control rules
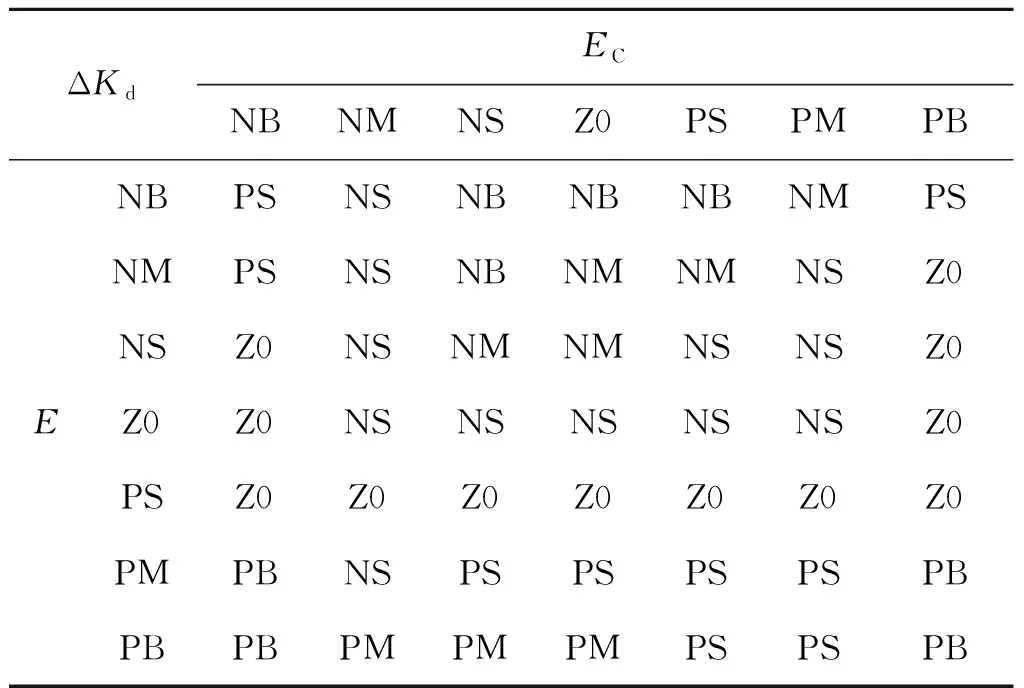
表3 ΔKd模糊控制规则Tab.3 ΔKd fuzzy control rules
4) 精确化计算。为了获得准确的控制量,就要求模糊方法能够很好地表达输出隶属度函数的计算结果。无论是最大隶属度法还是加权平均法,都是只考虑了模糊集合的一个点,而重心法能考虑到多个点的值,结果更加可靠,因此本文采用该方法进行精确化计算。
自适应模糊PID导弹控制系统是以误差E及误差变化率EC作为输入,以比例、积分、微分的变化量(ΔKp,ΔKi,ΔKd)作为输出。根据模糊规则,经过模糊推理和重心法清晰化,计算出PID控制器的三个变化量ΔKp、ΔKi、ΔKd来实现PID参数的在线调整,经过调整之后的PID 参数可以表示如下:
(1)

图3 自适应模糊PID控制结构框图Fig.3 Block diagram of adaptive fuzzy PID structure
3 系统仿真
3.1 弹体模型
根据文献[9—10]可以得到弹体传递函数如下:
(2)
式(2)中,第一个式子为俯仰通道弹体传递函数。其中KM是弹体传递系数,T1D是弹体动力时间系数,TD是弹体时间常数,ξD是弹体阻尼系数。本文将以文献[11]中某型导弹的俯仰通道为例进行数值仿真。
3.2 建立Simulink模型
1) 经典PID的Simulink模型
依据自动控制理论,在Simulink中依次放置输入信号,比例、微分、积分模块,传递函数模块,将各模块依次相连,加入示波器来观察响应曲线。在Simulink中搭建传统PID的模型如图4所示。
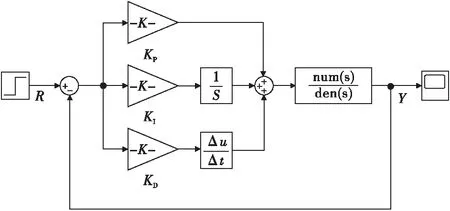
图4 PID控制系统模型Fig.4 PID control system model
2) 自适应模糊PID的Simulink模型

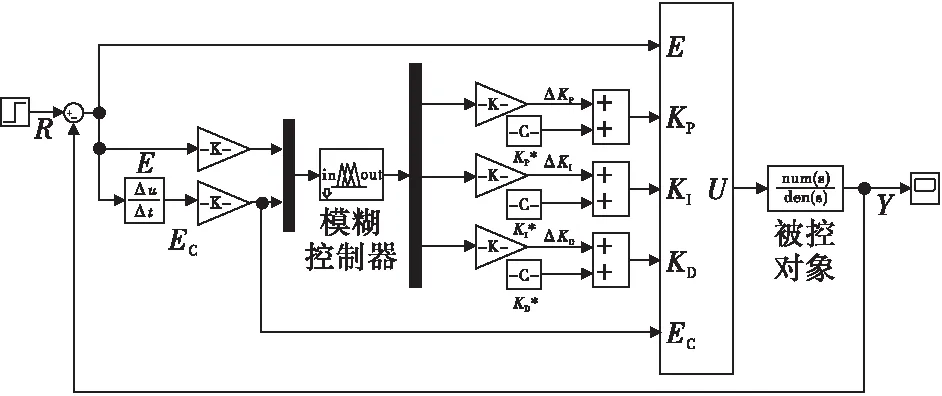
图5 自适应模糊PID控制模型Fig.5 Adaptive fuzzy PID control model control structure
3.3 仿真分析
为突出自适应模糊PID控制系统的优势,输入信号分别为单位阶跃信号和正弦信号,为验证其抗干扰性,在系统的输入端加入作用时间为0.5 s和1 s的脉冲信号作为干扰信号,比较分析了在不同输入条件下,系统在无控、经典PID控制以及自适应模糊PID三种状态的时间响应结果。
1) 正弦信号输入作用下系统的响应分析
图6为正弦激励响应曲线,可以看出,三种状态均无超调,但自适应模糊PID相比于传统PID和无控状态,上升时间更快,达到稳态时间也更快。
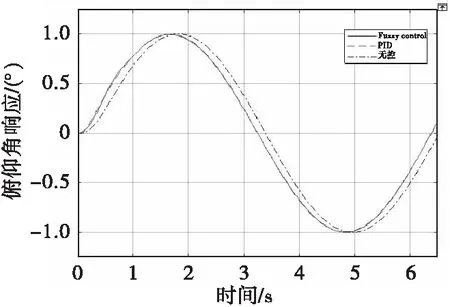
图6 三种状态下的正弦激励响应曲线Fig.6 The response curves under the excitation of sin
图7加入了作用时间为0.5 s的脉冲信号作为干扰。无控状态的超调量超过20%,上升时间是三者中最慢的;传统PID控制的上升时间缩短,但超调量明显增加,达到了40%,且震荡明显;自适应模糊PID的超调量不到20%,小于其余二者,且上升时间为三者中最快,不到0.5 s,达到稳态的时间也最短,控制效果明显强于其余二者。
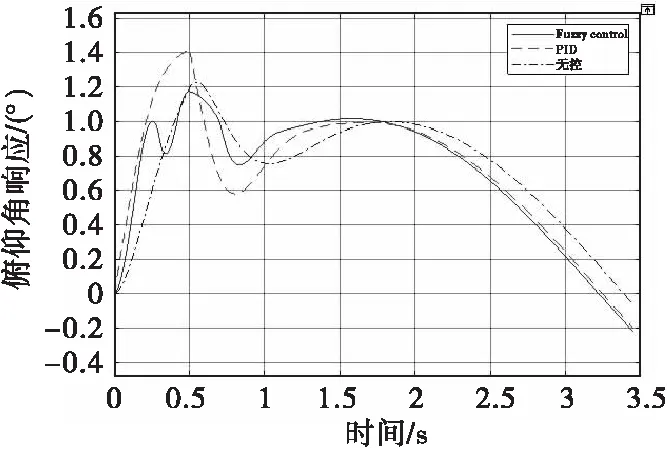
图7 加入0.5 s脉冲信号的三者响应曲线Fig.7 The response curves under the excitation of sin and 0.5 s pulse signal
图8是加入作用时间为1 s的脉冲信号得到的三者响应曲线,传统PID控制的上升时间和达到稳态的时间都比无控状态快,但超调量却增加且波动范围较大;自适应模糊PID上升时间和达到稳态时间是三者中最短,无超调,波动范围最小。
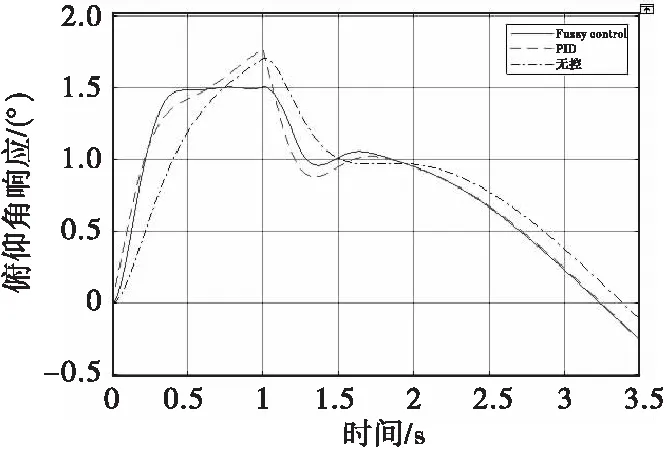
图8 加入1 s脉冲信号的三者响应曲线Fig.8 The response curves under the excitation of sin and 1 s pulse signal
2) 单位阶跃信号输入作用下系统的响应分析
图9为阶跃激励响应曲线,无控状态的超调量很小,仅有3%,但是上升时间最长;传统PID的上升时间加快但同时超调量也增加到了7%;自适应模糊PID不仅调节时间加快且没有超调量,控制效果是三者中最好的。

图9 三种状态下的阶跃激励响应曲线Fig.9 The response curves under the excitation of step
图10增加了0.5 s的脉冲信号,无控状态未达到期望值,上升时间和达到稳态时间均为三者最长;传统PID的上升时间和达到稳态的时间缩短,但超调量达到了20%;自适应模糊PID上升时间仅有0.2 s且无超调,波动范围小,达到稳态时间也最快,控制效果最理想。
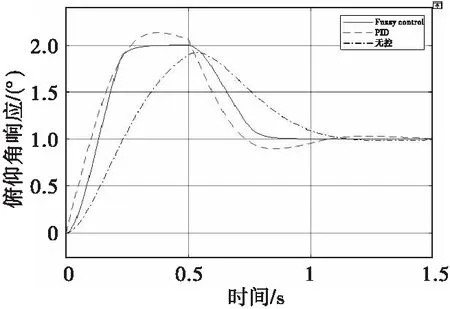
图10 加入0.5 s脉冲信号的三者响应曲线Fig.10 The response curves under the excitation of step and 0.5 s pulse signal
图11将脉冲信号的作用时间增加到1 s。无控状态超调量很小为2%,上升时间太慢,超过0.5 s;传统PID的上升时间和达到稳态时间都比无控状态短,但超调量达到了4%;自适应模糊PID的曲线上升时间快、无超调、达到稳态时间不到0.3 s,为三者最快,控制效果最好。

图11 加入1 s脉冲信号的三者响应曲线Fig.11 The response curves under the excitation of step and 1 s pulse signal
通过数值仿真结果可以看出,不论输入信号是正弦信号还是单位阶跃信号,干扰信号作用的时间无论长或短,相比较于无控状态和传统PID,自适应模糊PID的控制效果更加精准、稳定。
4 结论
本文提出基于自适应模糊PID的导弹控制系统。该系统能对PID的三个参数进行在线调整,根据被控对象的不同,计算出最优的参数供控制系统使用,从而更好地对非线性时变系统进行控制。数值仿真结果表明该控制系统具有响应时间快,上升时间短,超调量小,稳定性高的特点。在当前要求越来越高的导弹控制系统中有很高的工程应用价值。
