三维激光点云在隧洞病害缺陷检测中的应用研究
2021-02-12施富强张铱莹王立娟路祥祥
杨 伟,施富强,,张铱莹,王立娟,路祥祥
(1.西南交通大学机械工程学院,四川成都,610000;2.四川省安全科学技术研究院,四川成都,610000)
0 引言
随着我国水利水电事业的大力发展,大量的水工隧洞得以修建或正在建造,从设计、施工到运营维护,隧洞安全对水利工程具有关键性作用。在水工隧洞长期运行过程中,可能会出现衬砌开裂、破损、渗漏、腐蚀等缺陷,这些缺陷势必会影响水工隧洞的安全运行,缩短隧洞的使用寿命,甚至可能导致隧洞发生安全事故,造成重大经济损失乃至人员伤亡。
为保证水工隧洞安全运行,应定期对水工隧洞进行结构安全检测。传统检测方法是检测人员在水工隧洞放空检查期间,进入水工隧洞进行目视检查,发现缺陷进行人工标记,检测效率低且检测结果具有较大主观性,难以保证检测结果的准确性。针对人工检测的弊端,近年来国内外引入数字图像处理技术用于隧道缺陷检测[1-5]。黄永杰等[6]提出一种基于数字图像识别的隧道渗漏水自动检测技术,用于隧道的安全检测。王平让[7]通过隧道衬砌裂缝自动检测模型试验,讨论了光照强度和检测距离对检测有效像素的影响。然而,水工隧洞作为地下隐蔽工程,由于其规模大、长度长、照明差等特点,在一定程度上增加了图像处理技术用于水工隧洞隐患检测的难度。
三维激光扫描技术是一种集光、电和计算机技术于一体的三维测量技术[8],具有高效率、高质量的数据采集优势,近年来在国内外形变监测、数字信息化提取、文物古迹保护等诸多领域有了很多应用[9-16]。因此,采用三维激光扫描技术对水工隧洞进行隐患检测具有工程实际意义。
1 三维激光扫描技术概述
1.1 三维激光扫描技术的原理
三维激光扫描技术利用激光测距原理,非接触式地快速大量采集目标物体表面几何图形数据和影像数据。数据包含表面点的三维坐标值、反射率等信息,后期通过计算机快速高效地对目标物体建立三维模型。三维激光扫描仪的工作原理是由激光发射器发出激光脉冲信号,到达物体表面后再沿几乎相同的路径返回,接收器接收到返回信号后,时间计数器记录下脉冲往返时间,算出目标点P与扫描仪的距离S,同时控制编码器控制并测量脉冲激光的扫描角度,记录横向扫描角度α(水平角)和纵向扫描角度β(垂直角),最后由距离测量值S、角度α和β解算出目标点的相对三维坐标。以三维激光扫描仪为坐标系原点,获取空间点P坐标的原理见图1。
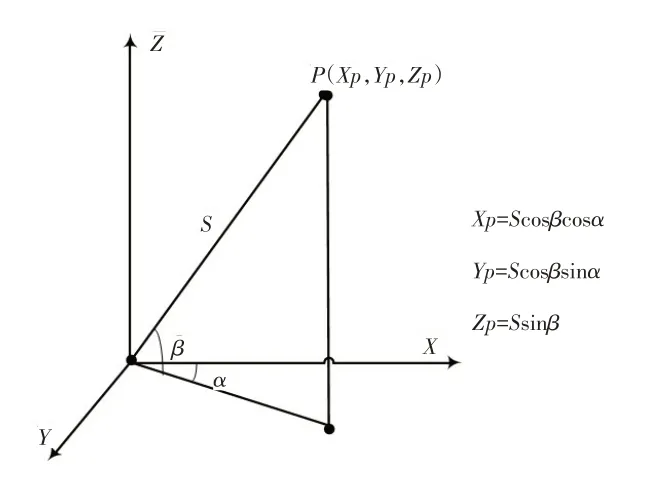
图1 扫描点坐标计算原理图Fig.1 Calculation of scanning point in coordinates
1.2 三维激光扫描仪
选择德国Z+F公司的IMAGER 5010C三维激光扫描仪作为水工隧洞内表面几何场数据采集设备。该扫描仪将I-CAM相机集成于设备内部,同时配备Z+F公司原厂生产的专用LED照明灯,在不同光线条件下均能准确生成真实全景影像照片。该设备采用的是相位式激光测距原理,拥有水平360°、垂直320°扫描范围,扫描距离为0.3~187 m,在50 m处的线性误差小于1 mm,25 m处点云分辨率为0.5 mm。
2 工程应用研究
2.1 水工隧洞概况
某水电站引水系统由进水口、进水口事故闸门室、引水隧洞、上游调压室、高压管道等建筑物组成,采用4洞8机布置。进水口事故闸门室采用洞内竖井式布置,距离隧洞进口约100 m。进水口至上游调压室的平均洞线长度约16.7 km,引水隧洞立面为缓坡布置,底坡3.65‰,由进口底板高程1 618.00 m降至高程1 564.70 m与上游调压室相接。4条引水隧洞全洞钢筋混凝土衬砌,隧洞开挖直径12.4~14.6 m,衬后直径11.2~12.6 m,均长16.4 km,隧洞为特长大断面水工隧洞。选择3号引水隧洞作为三维激光扫描技术在水工隧洞隐患检测中的应用研究对象。
2.2 外业数据采集
2.2.1 控制测量
该水工隧洞长度大于10 km,若不进行控制测量,误差的传递与积累会造成最终测量结果的巨大误差。因而,特长大断面隧洞的控制测量应根据隧洞线型走向、隧洞断面尺寸、隧洞内环境、仪器设备合理布设控制点,以构建合理且满足精度的控制网。
2.2.2 三维激光扫描
在隧洞内进行三维激光数据采集,数据质量受扫描仪的扫描参数、扫描距离及角度的影响,因此采集数据时需要结合现场踏勘、隧道结构及扫描仪参数制定合理的扫描方案。三维激光扫描仪布设在引水隧洞的中心线上,每一测站均采用Z+F IM⁃AGER 5010C扫描仪中Superhigh分辨率模式进行扫描。三维激光扫描仪的扫描精度受扫描距离影响,尽管扫描范围跟扫描距离成正比,但如果减少设站,采集的数据精度会随着距离的增加而递减[17]。为了使数据达到精度要求,必须增加设站,严格控制扫描距离。O.D.Lichti的试验表明,当入射角大于65°时,三维激光扫描的点云误差才开始急剧上升[18]。由测站间距S(m)、隧道内径D(m)所构成的几何关系可以得到每个测站点在扫描区间内的最大入射角θmax:

若将测站距离设置为20 m,则根据公式(1)求得最大入射角为59°,满足要求。此外,标靶的布设方式如图2所示,在两个相邻测站间布设2个标靶,每站扫描均布置3排、每排2个标靶,共6个标靶。
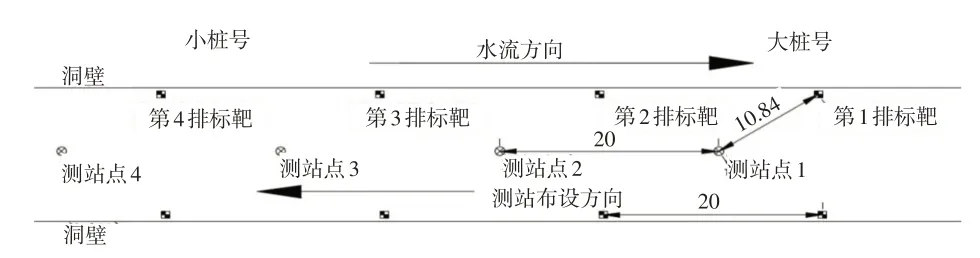
图2 三维激光扫描标靶与测站点布设示意图Fig.2 Layout of 3D laser scanning targets and measuring sta⁃tions
2.3 点云数据处理
2.3.1 点云去噪
采集到的三维点云数据中,由于隧洞底部流水和壁面上水迹会对激光反射产生噪音干扰,会对后续数据处理产生干扰,因此需要进行数据去噪。去噪方式包括按反射率去噪和按点间距去噪。笔者应用各去噪方式所采用参数如下:(1)按反射率去噪:参数选择范围为1%~99%,即仅保留反射率在总反射率范围中1%~99%间的点,去掉由于水面反射造成的几乎没有反射光的点和由镜面反射造成的反射光很强的点。(2)按点间距去噪:参数选择范围为大于5 cm,即去掉由于距离过远造成点间距过大或在隧洞轴向方向没有返回数据的点。
2.3.2 点云拼接
三维激光扫描仪的数据采集过程中,由于水工隧洞体量大、环境复杂,需要对其进行多站扫描以获取完整的点云数据。为获得研究对象的整体三维模型,将不同站扫描获取的点云数据整合到同一坐标系下,这个过程称为点云数据配准或点云拼接。常用的点云配准方法有基于特征点的配准和基于标靶的配准[19-20]。对于水工隧洞的测量数据拼接,利用控制点文件和标靶进行配准,以得到较高的配准精度。将所有数据准备好后,依次将三维激光扫描的原始数据和标靶的全站仪测量数据导入到数据处理软件中,并在原始数据图像中选择标靶点的位置,每一站扫描测站中需选择3个以上的标靶点,软件将根据原始数据中标靶点的坐标和输入的全站仪测量所得的标靶点坐标进行计算,获得将三维激光扫描原始数据转换到全站仪测量的坐标系统中所需的移动和旋转参数,利用该参数进行整个原始数据的坐标转换,从而完成三维激光点云数据的拼接。最终得到拼接标准偏差为0.71 mm、平均偏差为1.45 mm的整幅点云模型,如图3所示。
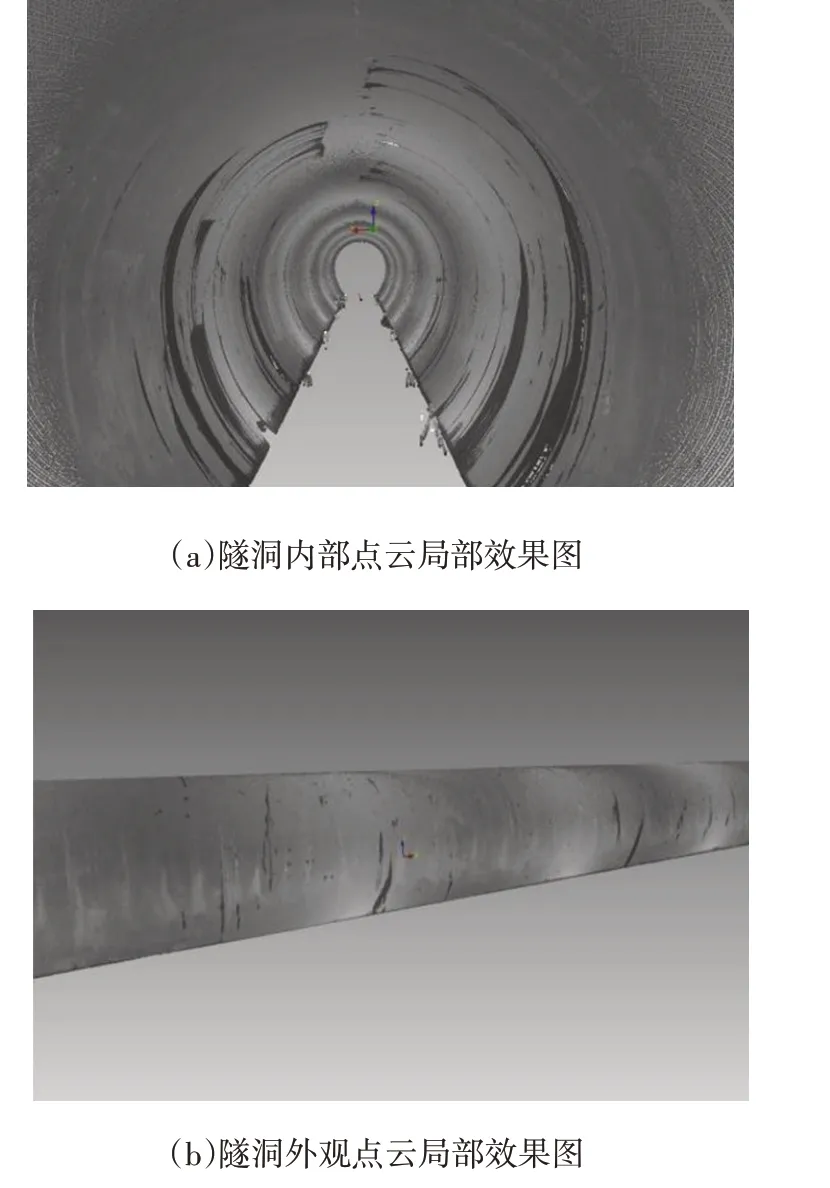
图3 引水隧洞点云模型Fig.3 Point cloud modelof diversion tunnel
2.4 检测结果及分析
2.4.1 隧洞形变分析
利用三维激光扫描仪在不同时期获取的水工隧洞结构表面数据,提取相同位置的断面曲线进行对比来分析水工隧洞的变形情况。以2016年和2018年扫描获取的两期隧洞点云数据为基础,通过软件分别对引水隧洞沿隧洞顶部轴线每隔5 m且在同一桩号处提取断面,共制作断面3 200多幅。2018年该引水隧洞K13+020处断面如图4所示。
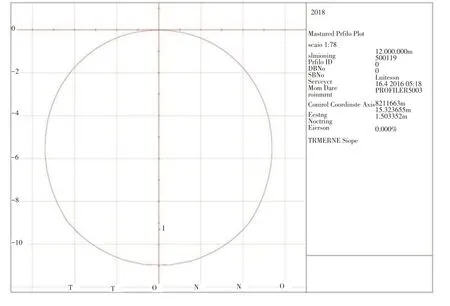
图4 2018年3号引水隧洞K13+020断面图Fig.4 Cross section K13+020 of diversion tunnel No.3 in 2018
断面提取完成后,对同一桩号位置两个时段的左、右和拱腰各三个形变数据进行对比分析,即A、B、C、D、E和F,如图5所示。计算隧洞全部断面的A+F、B+E、C+D的值,分析其变化情况,由此判断隧洞的变形情况。表1所示为整个隧洞A+F、B+E、C+D值在不同取值范围内所占的百分比,由表1可知,A+F值中-2~2 mm变形范围占94.06%,B+E值中-2~2 mm变形范围占95.21%,C+D值中-2~2 mm变形范围占93.80%,说明隧洞整体结构变形较小。
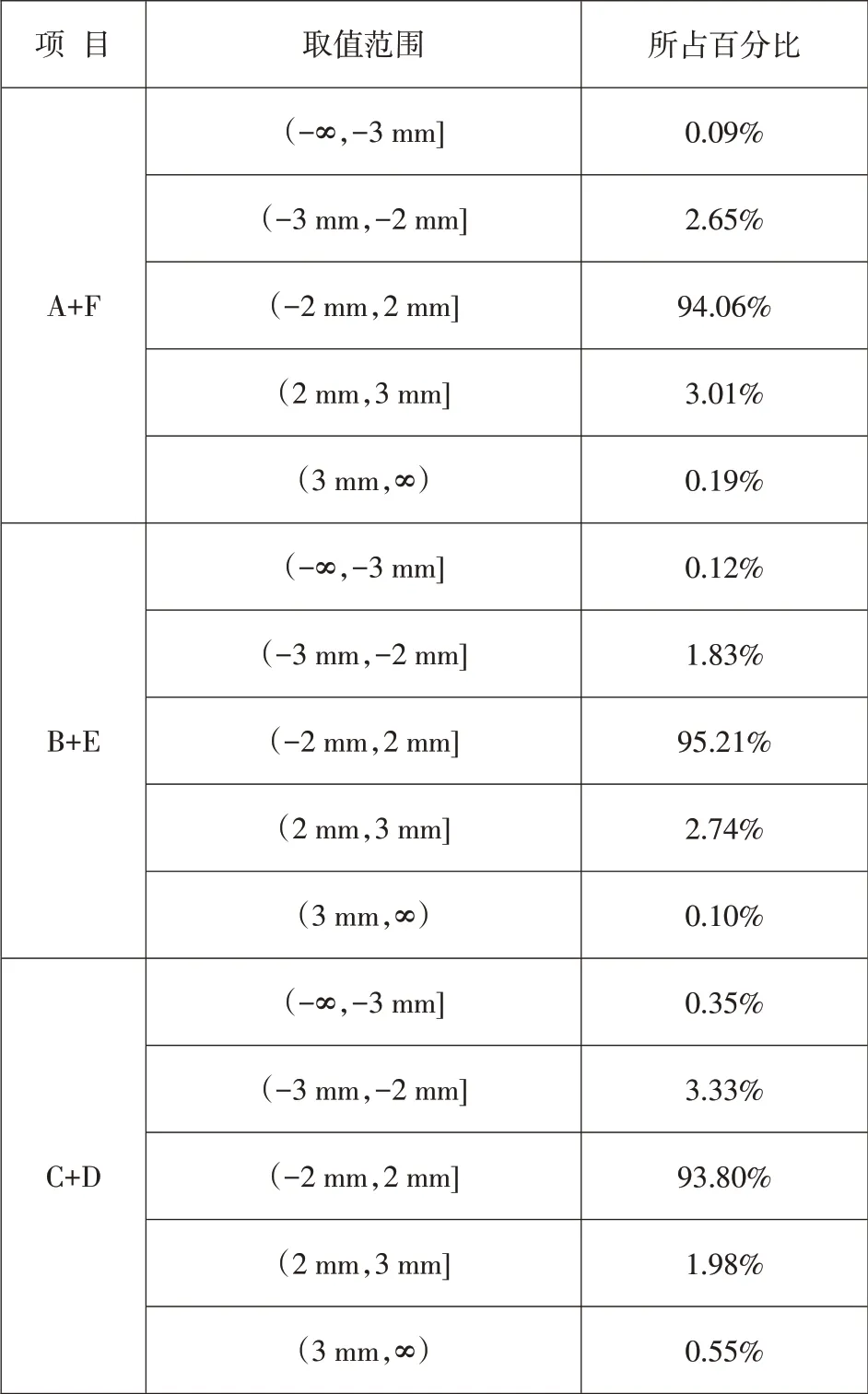
表1 引水隧洞中A+F、B+E和C+D计算结果所占百分比Table 1 Percentage of calculation results from A+F,B+E and C+D
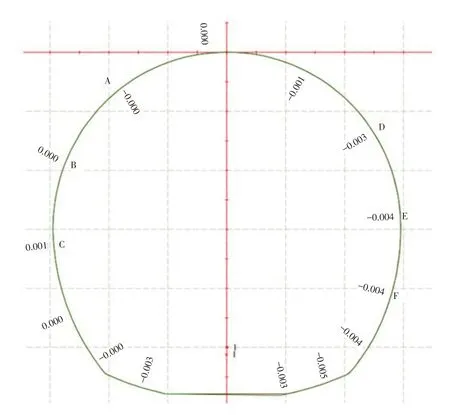
图5 2016~2018年K0+140断面对比图Fig.5 Comparison of section K0+140 in 2016~2018
2.4.2 裂缝识别
隧洞渗漏往往会在隧洞壁面挂有明显的渗水痕迹,由于壁面渗水对激光反射强度有较大影响,导致隧洞中的渗水往往具有明显的色调特征,在正射影像图中易于辨识。因此,采用隧洞壁面水迹特征对裂缝进行初始判别,但隧洞中的水迹会呈现出不同的形态特征,结合现场裂缝调查结果,其主要表现特征如表2所示。

表2 引水隧洞表观渗水水迹特征Table 2 Trace characteristics of leakage water from diversion tunnel
根据三维激光扫描数据正射投影模型,将每一扫描测站桩号前后各17 m、顶部中线左右各17 m(即设计图中左右洞壁面)的数据投影到投影模型上,做成每一站扫描的正射影像图。正射影像图的长边为隧洞轴向,将隧洞拱顶及左右侧壁图像展开形成隧洞正射影像展示图,见图6。根据正射影像展示图,结合隧洞裂缝渗水的水迹特征,解译识别裂缝,并提取裂缝的长度、位置等信息进行裂缝勾绘,识别结果如图7所示。

图6 正射投影与断面对应关系图Fig.6 Corresponding relationship between orthographic projection and cross section

图7 裂缝识别结果图Fig.7 Results of fracture identification
3 结语
利用三维激光扫描技术获取隧道表观的三维激光点云数据,对某水工隧洞进行整体形变分析和表观裂缝识别。研究过程与结果表明,三维激光扫描可准确、快速获取隧洞的裂缝、渗漏等缺陷信息和空间数据。相比传统检测方法,极大提高了作业效率。应用三维激光扫描技术检测隧洞病害隐患,可建立水工隧洞健康档案,为实现隧洞全寿命周期安全管控提供更精准、更完备的数据支撑。