校园智能送餐机器人的设计与实现
2021-02-11许量为李建勇
许量为 李建勇
(西北工业大学明德学院,陕西 西安 710124)
0 引言
随着科学技术的发展,科技在很大程度上改善了人们的生活。在2020 年1 月初,瑞幸咖啡在美国的发布会上表示,今后将会推出智能售卖咖啡车,在给顾客提供方便的同时,还能提升自己的销售额。2017 年,由饿了么未来物流团队打造的智能外卖机器人“万小饿”已经在上海虹桥万科中心开始服务,但是它是专门针对城市和办公写字楼的送餐机器人。2019 年,美国乔治梅森大学已经拥有了校园机器人送餐服务。目前,中国还没有一款专门针对大学校园的送餐机器人。“万小饿”的智能化程度很高,但是其自身质量很重且造价高昂。虽然续航时间长,但是每次只能送3 单外卖[1],不适合在校园里配送1 次多单的订单。与它相比,自主研发的校园送餐机器人性价比极高,本身就有很好的发展空间,除了在各大高校中应用,它还可以在各种大型工业园区完成户外送餐的任务,可以在10 min 之内或者更短的时间内完成送餐任务。校园智能送餐机器人项目的推出可以节省时间,提高学习和工作效率,在就餐高峰时期还可以减轻食堂的就餐压力,为学生的宿舍和校园生活提供便利。
1 设计思路
1.1 设计初衷
本着以人为本的设计思路,旨在为学生的宿舍生活提供便利,该文设计了校园智能送餐机器人。现在的大学校园面积较大,饭堂、教学楼和宿舍之间的距离都很远,因此很多同学会因距离而不去吃饭,智能送餐机器人就可以很好地解决上述问题。从另一个角度来说,智能机器人还可以节省时间、提高学习效率以及节省食堂送餐的人力、物力和财力,与此同时,还可以提高商家的营业额,真正做到让学生足不出户就能吃到食堂的美味,从而很好地为学生的宿舍和校园生活提供便利。从长远的角度来看,后期应用到外部市场时,可以解放一定的人力,在节省成本的同时还可以提高销售额。
目前,校园智能送餐机器人在各大高校都有一定的商业市场,可以进一步推广应用。除了大学食堂以外,还可以在后期技术成熟时,将其推广到其他市场,例如户外、商场、大型酒店以及大型工业园区等。该技术拥有巨大的市场潜力,在未来智能化的发展背景下,该技术的应用场景会越来越大。
1.2 设计结构
校园智能送餐机器人由智能车底盘和附加的外卖箱组成,智能车底盘以STM32F103C8T6 最小系统为主控芯片,搭载TB6612FNG 电机驱动模块、超声波避障模块、18650 可充电电源模块以及红外循迹模块等模块,可以实现循迹导航、自动避障、蓝牙解锁以及电机调速等功能。外卖箱部分则分为内外2 层,外层采用EPP 保温塑料,底部配有橡胶防滑垫,具有无毒无味、不易变色、表面光滑、容易清洗、保温效果好、不怕摔碰以及可重复使用等优点。
1.3 控制系统设计
控制系统中很重要的一部分就是系统负反馈,通过程序判断各项功能是否正常、循迹是否成功、电机运转加减速是否正常以及是否有障碍物。判断结束后,如果存在问题,那么微型计算机会根据特定的算法进行计算,并对其进行调整修正,如果没有问题就正常执行任务。在该设计中,避障模块采用的算法是局部避障动态窗口法(DWA)算法,该算法可以让送餐机器人及时避让障碍物;红外循迹模块采用比例积分微分(PID)位置算法来计算它是否偏移预定轨迹(偏移了多少),便于送餐机器人调整路线;电机驱动模块则是通过MATLAB 仿真拟合出平滑的S 曲线,提出不同约束条件下的S 曲线平滑度控制指标,通过将S 曲线离散化分为多个脉冲频段来控制电机的稳定运行以及加减速,使送餐机器人适当地减速并顺利完成转弯动作。系统设计图如图1 所示。
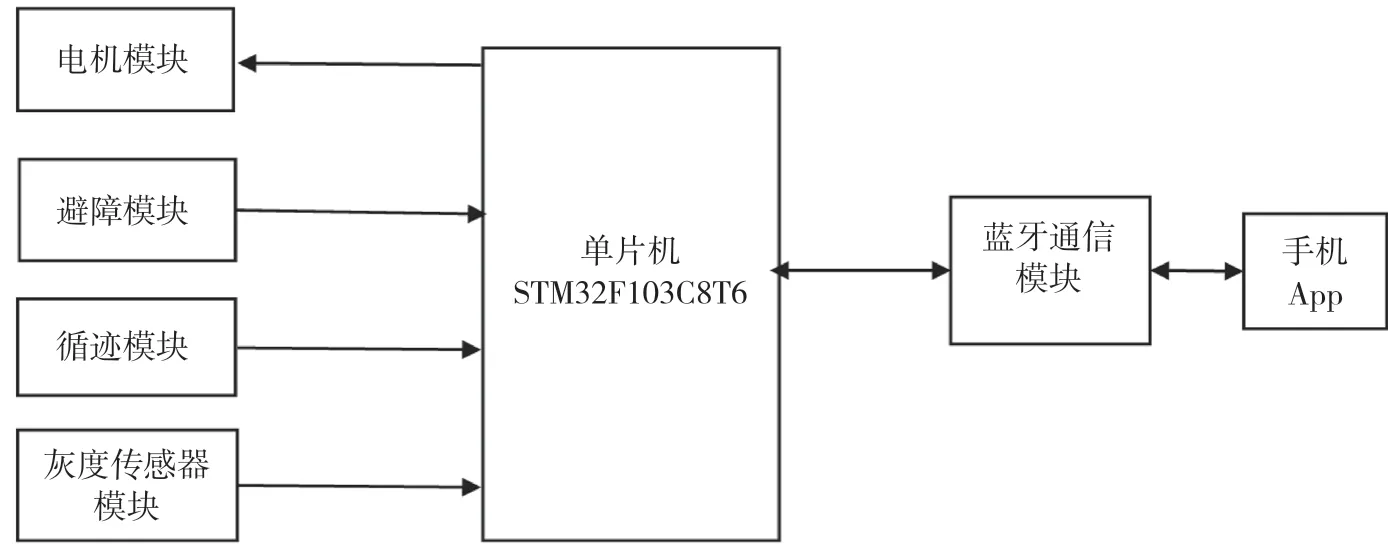
图1 智能送餐机器人系统设计图
1.4 送餐流程
启动系统,搜索并连接蓝牙系统,连接成功后开始进行循迹,否则重复连接蓝牙步骤直到连接成功,循迹成功后继续前进,否则修正方向直到循迹成功。如果碰到障碍则原地等待,障碍被移除后继续前进直到指定位置,在指定位置停止并发送信号等待取餐,如图2 所示。
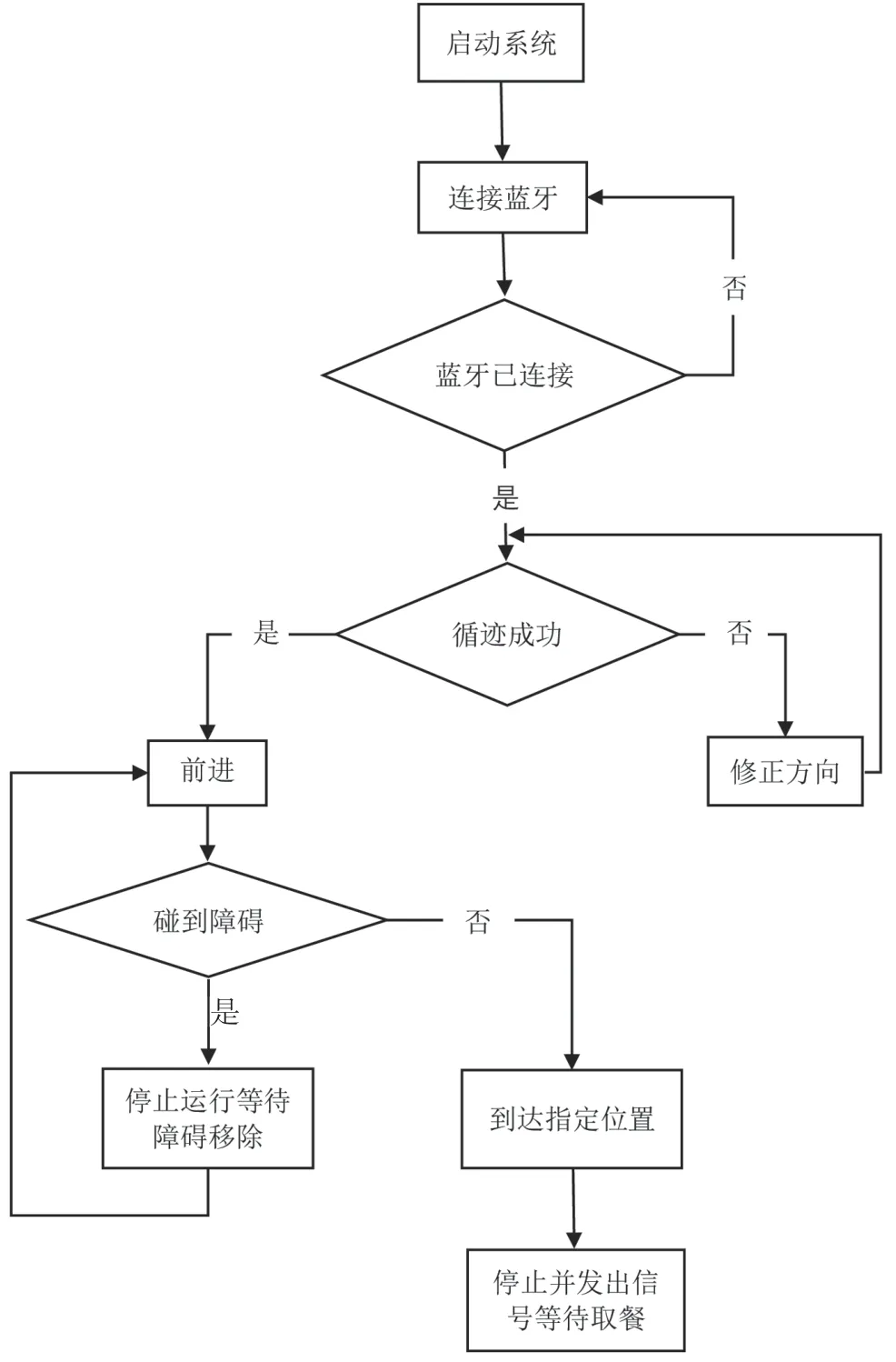
图2 送餐流程图
2 硬件系统
2.1 循迹模块
选择红外循迹模块需要考虑2 个方面,循迹点个数的多少和周围光线的变化程度。循迹点的个数越多循迹结果也越精确,因为周围光线的变化对循迹也有一定的影响,所以必须考虑周围光线的影响,选择受周围环境变化影响较小的循迹模块。该系统中的循迹部分由4 个红外循迹模块共同组成智能送餐机器人的“眼睛”,引导智能送餐机器人沿着轨道线行进。红外循迹模块使用4 个发射管发射红外光线,当光线照射到黑色轨迹和周围其他色系的环境上时,根据反射强度的不同,接收端接收到不同强度的反射光线,根据发出反射光线的强弱程度来判断轨道的位置,通过系统负反馈,基于PID 位置算法能够使智能送餐机器人及时回到正确的轨迹。如果光线到达指定位置时的颜色不是黑色,那么传感器发射出去的红外光大部分都会被反射回来[2]。模块化的设计使安装过程更加方便快捷,其电路图如图3 所示。红外循迹模块的价格低廉,体积小巧方便,工作环境也很广泛,能够在不同温度范围下使用,而且在不同的环境中都能够稳定、可靠地运转,因此该设计选用红外循迹模块。

图3 循迹模块电路图
2.2 灰度传感器模块
灰度传感器包括1 个白色高亮发光二极管和1 个光敏电阻,发光二极管照射到灰度不同的地面上返回的光是不同的,根据光(光敏电阻接受到返回的光)的强度差异,光敏电阻的阻值也不同,可以对灰度值进行测试,从而实现识别定位的功能。到达指定位置后,送餐机器人会停下来给蓝牙通信模块发送指令,然后通过蓝牙向卖家发送提示信息并等候取餐。
2.3 超声波避障模块
校园智能送餐机器人中的避障模块选用HC-SR04 模块,该模块拥有性能稳定、测度距离精确、模块高精度以及盲区小等优点。在运送途中,送餐机器人很难一直保持自身的绝对平稳和稳定,探测系统也很难精准地探测其真实的距离,1 个超声波传感器很难对整个面进行测量,而且超声波模块具有扩散性,并且超声波在不同介质中传播速度会变得更为稳定[3],考虑上述特性,该设计在避障方面选择采用多个超声波避障模块协同运作。
2.4 电机驱动模块
该设计选择TB6612FNG 直流电机作为驱动模块,它不但可以同时驱动2 个电机,而且不需要外加散热片,外围电路设计也很简单方便,只要外部接上电源滤波电容就能直接驱动电机运行。直流电机的控制原理是根据定子的绕线来决定启动(或者关闭)换流器中功率晶体管的先后顺序,使电流依次流经线圈产生的磁场并与转子相互作用,使电机随所产生磁场的方向来转动,要使转子停止转动,则需要关闭功率晶体管。要使电机转子反向转动,则需要调换功率晶体管的开启顺序。
2.5 蓝牙通信模块
该系统使用 HC-06 无线蓝牙通信模块,HC-06 蓝牙模块的优点是配对以后默认使用全双工的串口模式,不需要了解蓝牙协议,可以使用无奇偶校验的通信模式[4]。蓝牙通信技术用无线的方式将各种数据和设备连到同一个微网下,可以在这些连接设备之间实现快捷且方便的通信。能够实现手机和送餐机器人之间的蓝牙通信,主控芯片和各部分模块接收到的指令都是通过蓝牙传输的,通过蓝牙接口传到接收端,通过A/D、D/A 之间的转换成为各种模拟信号。接收信号时,将接收端开关设置为开启状态,天线端接收射频信号后,经过蓝牙收发器将其传输给基带信号处理器。
3 软件系统设计
3.1 电机驱动控制设计
电机驱动软件是设计该机系统的基础,通过手机软件可以控制智能小车行进的快慢和转向,通过电压反馈调整其脉冲宽度调制占空比,进而调节和驱动智能送餐机器人。利用微处理器的数字输出来对模拟电路进行控制,采用差动转向来控制机器人的转向,差动转向就是一个轮子的转速比另外一个轮子快或者慢,使2 个轮子速度不一样,从而达到转向的目的。通过调节脉冲宽度来改变输出电压,通过改变周期来控制输出频率,通过改变PWM 波、脉冲宽度等方式来控制电机速度。
3.2 蓝牙程序设计
蓝牙程序一共有2 个部分:1) 主控芯片上的程序。需要对其进行初始化串口,通过编程为其收到的指令设定对应的动作逻辑,以方便控制机器人运行。2) 手机、平板以及电脑等控制端的软件程序。可以使用APICloud 开发平台制作软件,使用可视化工具快速构建应用程序,这样就可以通过该软件给蓝牙传输数据,然后通过蓝牙进行数据传输,进而控制主控芯片运行机器人。
4 运行分析
4.1 运行原理
该设计采用C 语言,通过Keil uVision5 编写程序, 设计基于机智云和主控制器核心芯STM32F103C8T6 的智能送餐系统, 配备ESP8266-01 Wi-Fi 模块、蓝牙模块、继电器控制模块、TB6612FNG 电机驱动模块、HDF70-818 摄像模块、光照传感器模块、AS608 识别模块、RCC522 模块、HC-SR04 超声波模块、LED 显示模块以及LED 显示模块,采用PCB 制板连接外围电路。当硬件部分连接并上电后, STM32F103C8T6最小系统开始工作, 因此在主程序设计部分,首先要对其各种功能进行初始化。在初始化系统时钟、GPIO 口、串口以及定时器后,再初始化各个传感器I/O 口。当传感器触发任务时, 将根据优先级按(从高到低的顺序)依次执行任务。
4.2 运行测试
选取一处封闭路段,设计黑色的运行路线轨道,为了检测机器人的减速和转向功能,将轨道设计为椭圆型,并在行进途中放置障碍物,以测试其避障功能。分别在不同的运行状态下检测智能送餐机器人的运行速度。测试结果见表1。

表1 送餐机器人运行速度测试结果
5 结语
该文设计的校园智能送餐机器人采用STM32F103C8T6最小系统为控制核心,外加HC-SR04 超声波模块、红外循迹模块、蓝牙模块以及继电器控制模块等模块,可以实现智能送餐车的自动循迹、自动避障、自动调速以及定位等功能。为餐厅节省了送餐的人力、物力和财力,与此同时,还扩大了餐厅的营业额。真正做到让学生足不出户就能吃到食堂的美味。经过实验测试,校园智能送餐机器人实现了预期的功能并且得到了商家的青睐。
