滨海核电冷源取水口拦污网网兜抽吸装置工作船运动响应分析
2021-02-11付建明于广录
付建明 王 涛 于广录 王 冰 闫 俊
(1.辽宁红沿河核电有限公司,辽宁 大连 116001;2.大连鸿泽泵业有限公司,辽宁 大连 116036;3. 大连理工大学,海岸和近海工程国家重点实验室,辽宁 大连 116024)
0 引言
由于大量海生物的出现,核电站经常发生海生物和漂浮物进入冷源入水口的事件,从而造成核电厂冷源系统堵塞[1-2]。目前,核电站采用传统“网兜拦截+人工海上渔船驳运清理”的方式来防护冷源系统,这种方式效率低且夜间作业风险高,会直接对核电站安全运行造成影响[3]。因此,辽宁某公司和大连某公司联合设计、制造了一种冷源取水口拦污网网兜海生物抽吸装置,将其安装在工作船上,将被拦截入网兜的海生物和漂浮物输送到海面,并运送至指定地点,代替传统人工海上渔船驳运清理冷源入水口拦截网兜中海生物的作业方式,该装置可以在设计工况下全天候、无间断地开展清理作业,彻底解决人工海上渔船驳运清理存在的安全隐患,提高经济效益,保障冷源安全。冷源取水口拦污网网兜抽吸装置工作船在进行工作时,启动锚机系统,抛锚索固定,将海生物切割装置调整至工作状态,连接网兜,即可在操作台上按要求模式进行抽吸作业。因此,需要根据具体工作的海洋环境条件对工作船的运动响应进行分析,获取关键位置的运动响应结果,评估其抽吸工作的安全性能。
1 工作船设计需求
1.1 工作海况条件
根据船体的对称性,考虑风、浪和流环境荷载入射方向与船长方向的夹角为0°~180°(风、浪和流共向),如图1所示。选取2 级海况波浪,3 级风风速,具体的环境参数值见表1。
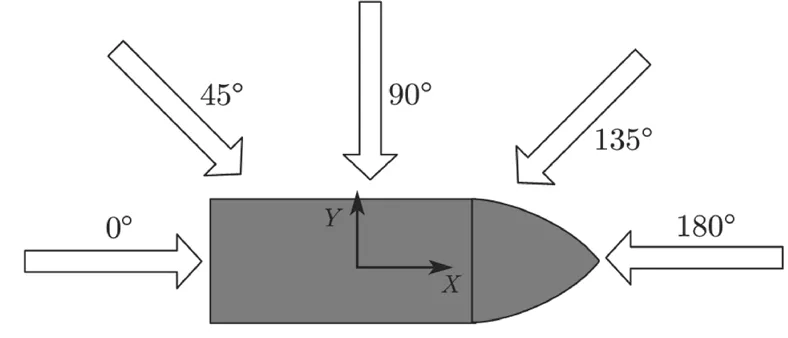
图1 工作船环境荷载入射方向
表1 作业工况环境参数
1.2 运动响应限制
工作船结构示意图如图2 所示。工作船能够承载提升装置、输送泵系统、满负荷为1 m3的过滤箱、锚机以及就地控制柜等设备和4 名操作人员,工作台设计有4 个锚绞机和导缆孔,以保证工作船水下连接网兜位置处的耦合装置的漂移范围不超过1.5 m。
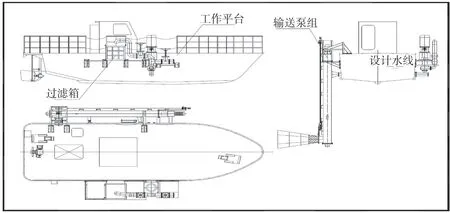
图2 工作船结构示意图
2 运动响应分析模型
根据工作船的运行情况,建立其对应的简化运动响应分析模型,如图3 所示。工作船会受到风、浪以及流环境的联合作用。
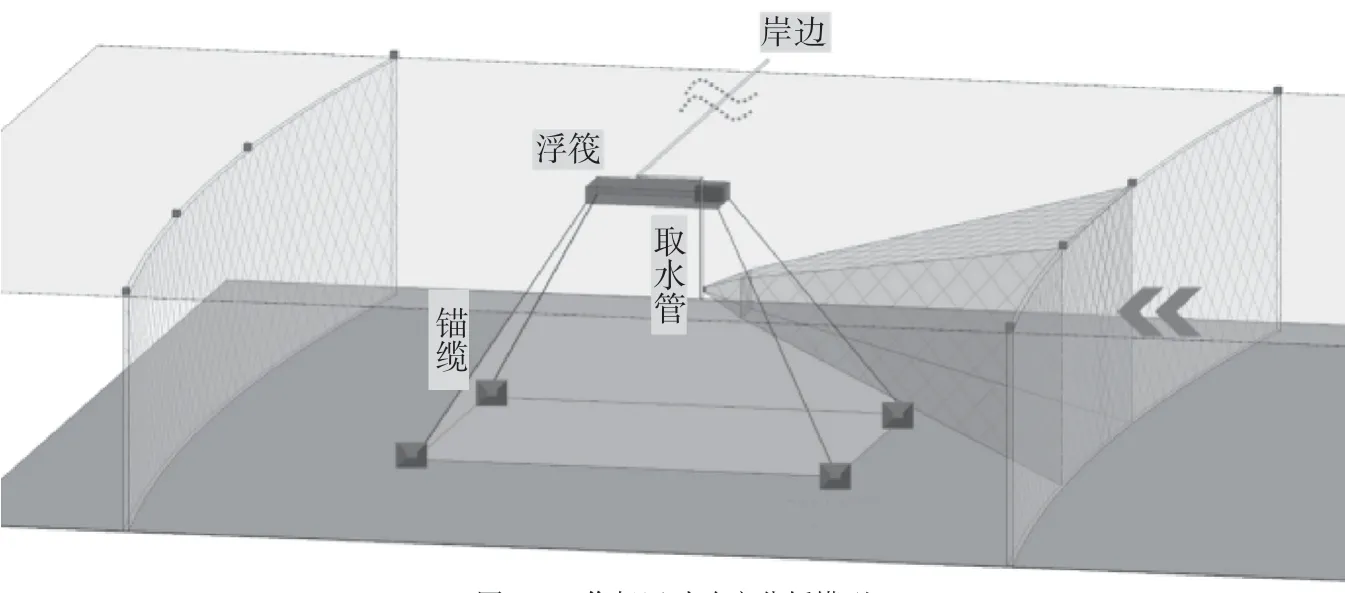
图3 工作船运动响应分析模型
2.1 环境荷载计算
2.1.1 波浪荷载
采用势流理论对规则波作用下浮式结构物的辐射和绕射进行分析。假设浮式结构物所受的一阶波浪力由波浪激励力和辐射力组成,二者可以线性叠加。其中,波浪激励力可看作是由入射力和绕射力组成的,辐射力是由浮式结构物运动引起的流体反作用力,由附加质量力和辐射阻尼力组成。
对受到简谐波浪作用的浮式结构物来说,其周围流场速度势可以分解为入射势、辐射势和绕射势3 个部分[4],如公式(1)所示。
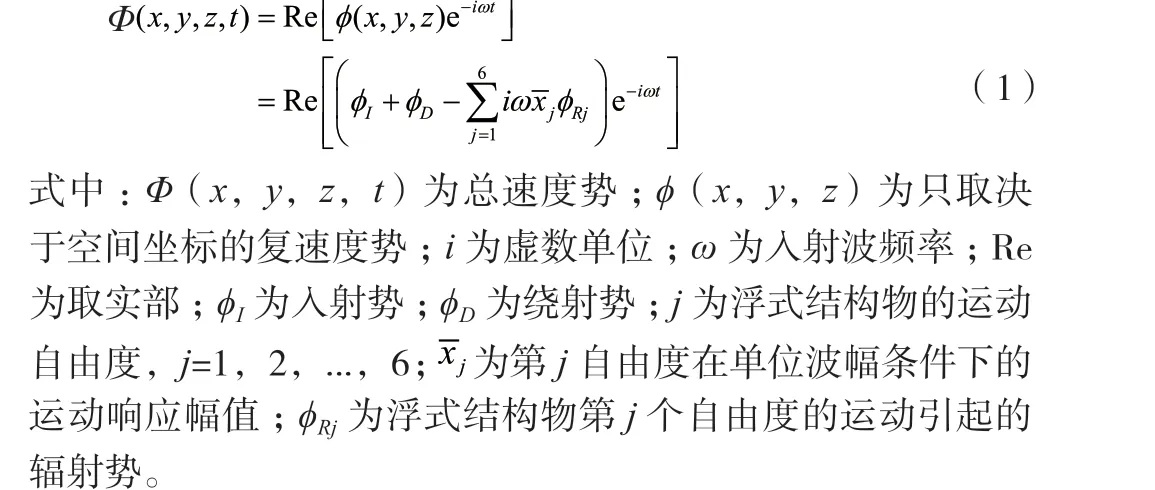
2.1.2 风荷载
对非超大型原油运输船(Very Large Crude Carrier,VLCC)船型浮式结构来说,可以通过模块法来计算风力和风力矩。根据API RP 2SK 规范[5],风力计算如公式(2)所示。

式中:FW为风力;CW为风力系数;CS为构件形状系数;Ch为构件高度系数;A为构件迎风面的垂向投影面积;VW为设计风速。
2.1.3 流荷载
对非VLCC 船型浮式结构来说,可以根据模块法来计算流力和力矩。根据API RP 2SK 规范[5],流力计算如公式(3)所示。

式中:FC为流力;CC为流力系数;Cd为拖曳力系数,对圆形单元取0.5,对平面单元,可参考图 4 取值;Ac为水线面下圆柱形构件的投影面积总和;Af为水线面下平板构件的投影面积;Vc为来流速度。
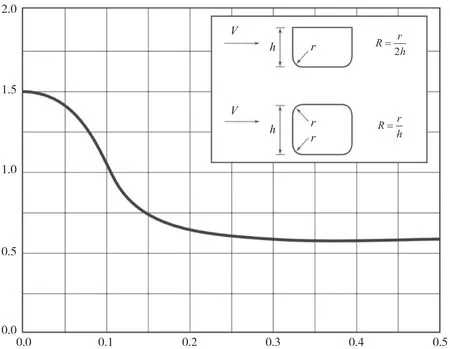
图4 平面单元的流力系数
2.2 时域耦合运动方程
浮式结构物在海上作业时会受到各种外界力的作用,通常包括风、浪以及流等所产生的海洋环境载荷和定位系统所产生的系泊力等,会导致浮式结构物产生6 个自由度的运动。浮式结构及其系泊系统总体运动如公式(4)所示[6]。

式中:x˙˙、x˙和x分别为浮式结构物的6 个自由度运动的加速度、速度和位移;M为浮式结构质量矩阵;Ma为附加质量矩阵;C为线性阻尼矩阵;K为静水刚度矩阵;Fws为作用在浮式结构物上的平均波浪漂移力;Fwf为波频力;Fsd为波浪低频慢漂力;Fwind为风力;Fcurent为流力;Fmooring为系泊力。
3 计算结果与分析
3.1 水动力模型
首先,利用船体建造组立图,通过三维建模软件CATIA 建立工作船的三维质量模型,包括船体外壳、船体内部舱壁、船体内部型材以及船体驾驶室等,如图5 所示。计算船体重心、质量以及转动惯量等参数,结果见表2,其中,Gx、Gy和Gz分别为工作船重心的x坐标、y坐标和z坐标,坐标原点设置在船艉底部船中处,Ixx、Iyy和Izz分别为工作船对x轴、y轴和z轴的转动惯量。
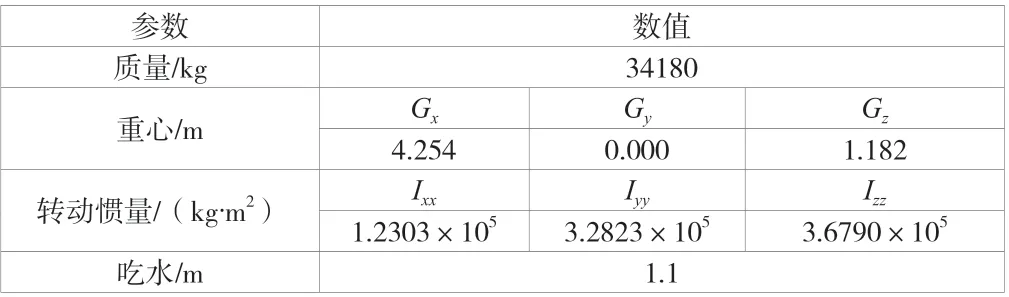
表2 清洁船质量、重心和转动惯量
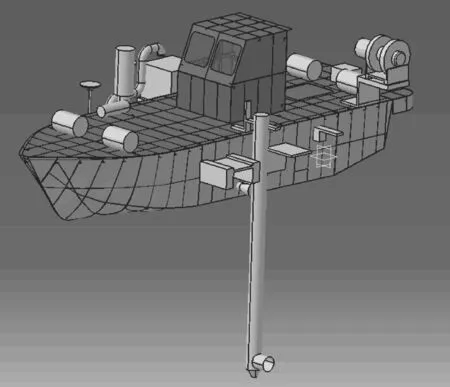
图5 工作船三维质量模型
其次,采用ANSYS APDL 建立船体的几何外形并剖分网格,得到船体的三维水动力模型,如图6 所示。利用宏命令ANSTOAQWA将ANSYS 中的面元模型导为AQWA-LINE 的计算文件,采用AQWA-LINE 计算该船体的水动力参数。选取周期分布为3 s~20 s 的单位振幅的规则波作为荷载,考虑船体的对称性,计算不同波浪入射角度(与X轴的夹角为0°、45°、90°、135°和180°)时该船体的水动力系数,部分水动力结果如图7 所示。其中,图7(a)~图7(c)中绕射力包括不同频率单位振幅规则波入射势和绕射势引起的作用力,图7(d)~图7(f)中RAO 表示不同频率单位振幅规则波引起的浮体运动响应幅值。
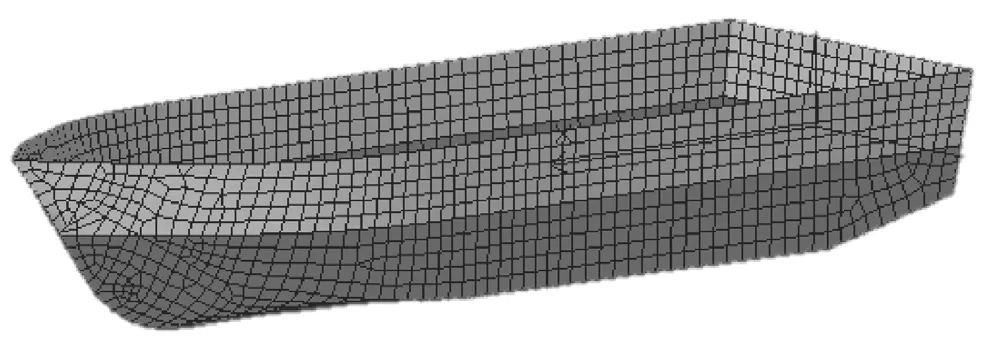
图6 工作船三维水动力模型
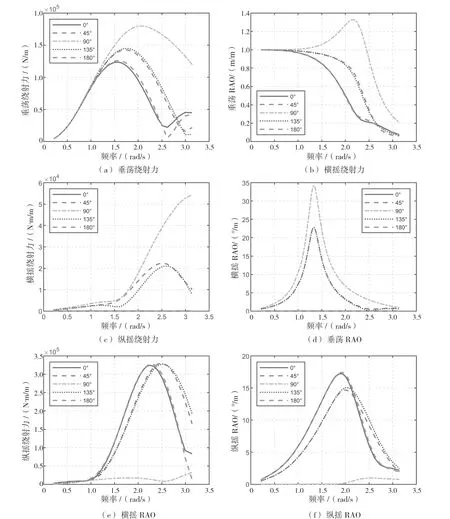
图7 工作船水动力系数
3.2 时域响应
考虑表1 中的环境荷载以及图1 中的不同入射方向,分析工作船重心位置纵荡、横荡、垂荡、纵摇、横摇和艏摇6 个自由度位移响应。同时,分析工作船水下连接网兜位置处的位移响应,运动响应统计值见表3(0°方向环境荷载作用的结果如图8 所示)。
从图8 和表3 可知,工作船在系泊作业工况且入射角度不同的特定环境荷载作用下,其纵荡自由度最大响应发生在环境荷载0°入射时,最大值为0.413 m;横荡自由度最大响应发生在环境荷载90°入射时,最大值为-0.433 m;垂荡自由度最大响应发生在环境荷载90°入射时,最大值为0.319 m;横摇自由度最大响应发生在环境荷载90°入射时,最大值为4.19°;纵摇自由度最大响应发生在环境荷载0°入射时,最大值为2.33°;艏摇自由度最大响应发生在环境荷载135°入射时,最大值为0.953°;环境荷载0°入射时,网口X向位移最大,为0.572 m;环境荷载90°入射时,网口Y向位移最大,为-0.653 m;网口Z向最大位移为0.488 m,发生在环境荷载90°入射时。
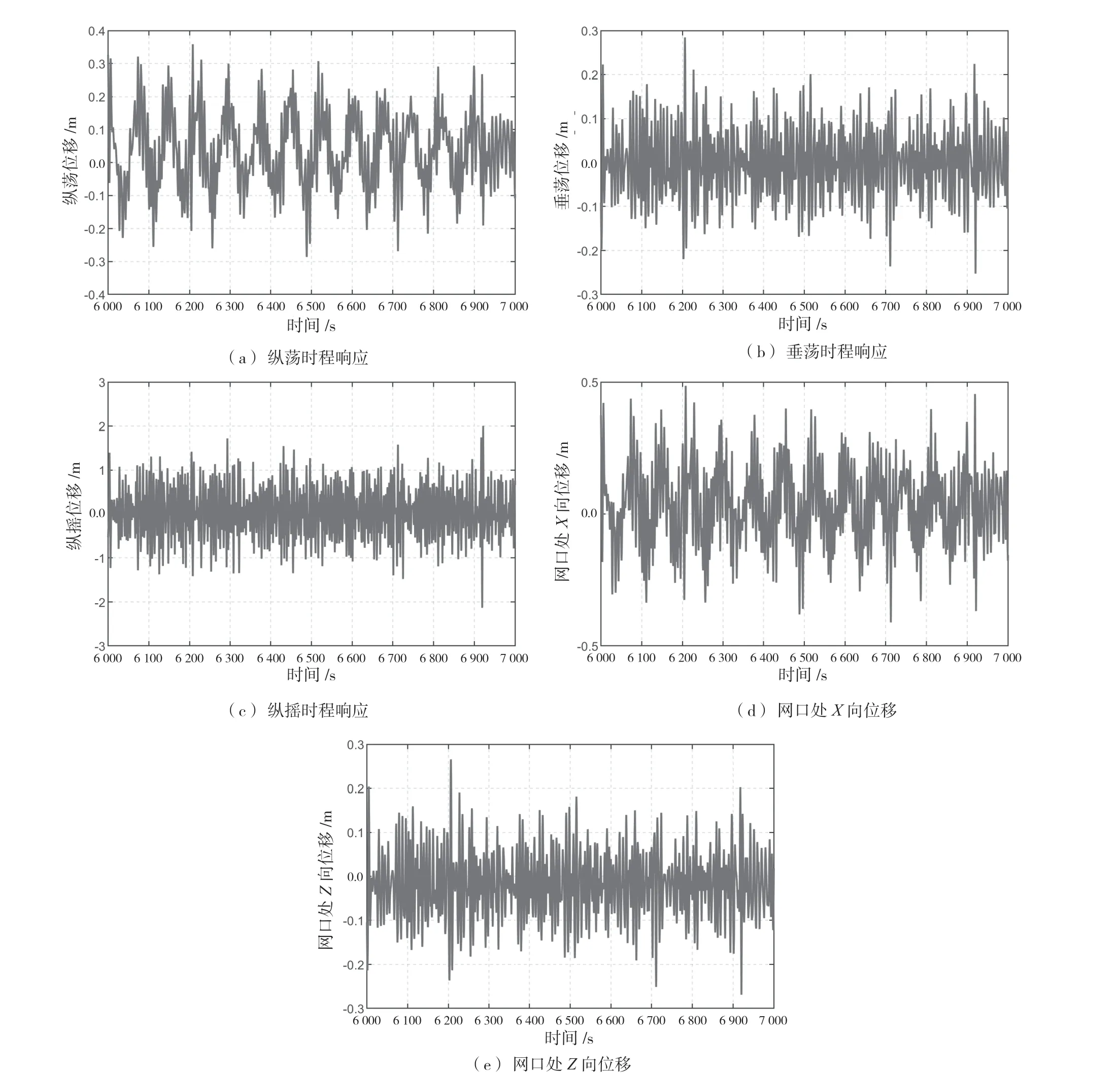
图8 工作船位移响应(0 度方向环境荷载作用)
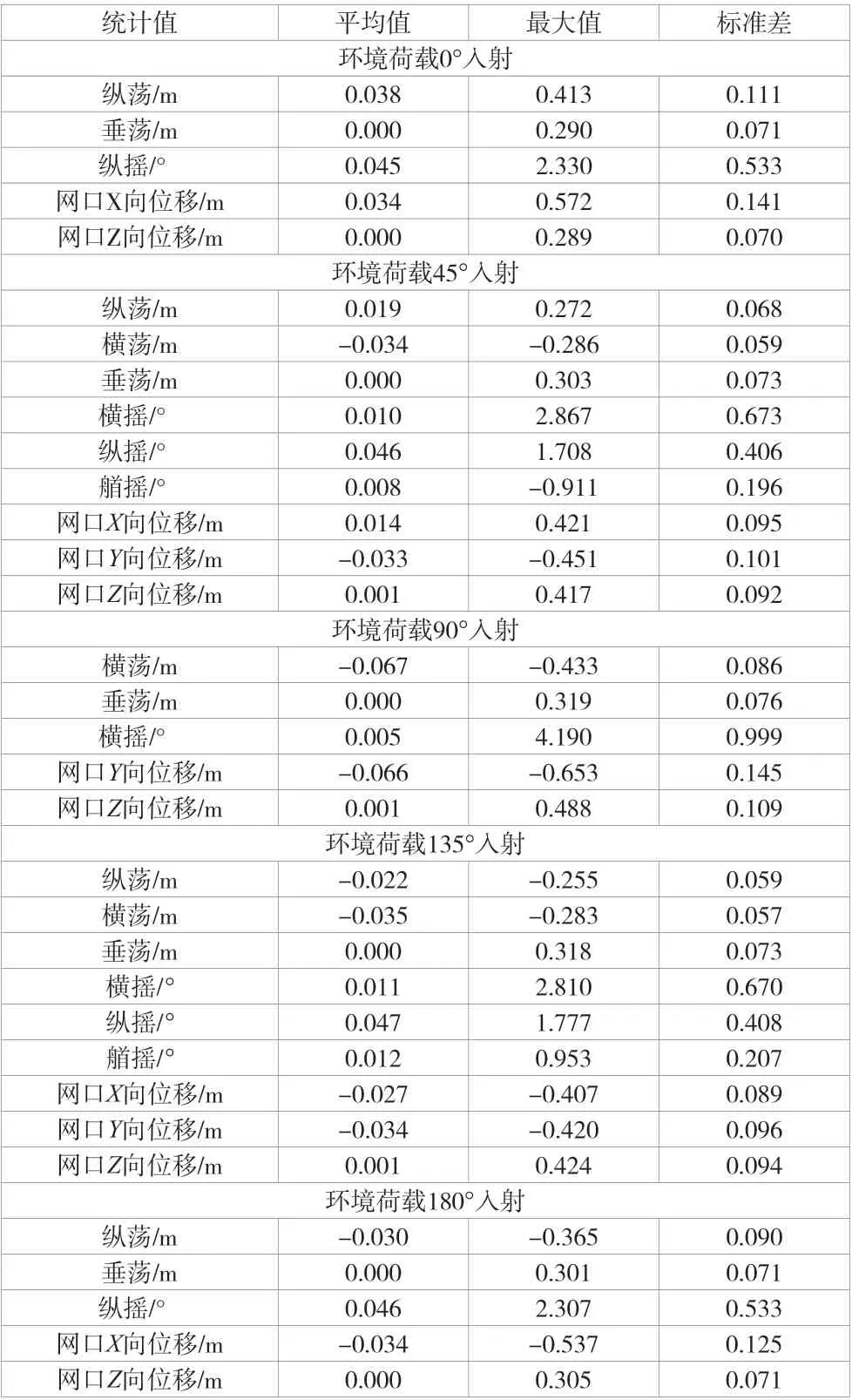
表3 作业工况的响应统计值
4 结论
对核电站冷源取水口拦污网网兜抽吸装置工作船在系泊作业工况条件下的运动响应进行数值分析可以得出以下2个结论:1)建立的工作船运动响应计算模型可以准确计算整体装置的响应并评估其设计安全。2)在给定的环境工况条件下,设计的工作船系泊状态下能够满足水下连接网兜位置处的运动响应约束限制,保证整体装置良好地运行。
