蒸汽发生器螺栓拉伸机控制系统设计
2021-02-10钱艳平韩小雷
钱艳平,胡 娜,韩小雷
(1.中核武汉核电运行技术股份有限公司,湖北武汉 430000;2.台山核电合营有限公司,广东台山 529200)
0 引言
蒸汽发生器(Steam Generator,SG)作为核电站关键承压设备,每个维修周期都需要进行人孔盖板的开盖及关盖密封作业。以往采用力矩扳手装拆螺栓螺母,旋紧过程中螺牙因粘连烧结易导致发生螺栓咬死现象。现在大多数核电站改为采用螺栓拉伸的方式进行开关盖作业,咬死状况大为改善。
整体拉伸式螺栓拉伸机(以下称“螺栓拉伸机”)可以将蒸汽发生器一次侧人孔所有的螺栓同时、同步的拉伸,这种对所有螺栓同时、同步的拉伸能最大限度地满足密封的需要。其控制系统能实现拉伸机对螺栓的可控高精度拉伸,减少操作人员的辐照计量。
1 控制系统总体设计
螺栓拉伸机控制系统分为气液系统和电控系统。
(1)气液系统采用液压超高压技术对人孔盖锁紧螺栓进行可控拉伸,以实现人孔盖开盖拆卸及预紧密封关盖(图1)。气液系统的主要功能包括:给拉伸机输出超高压、小流量的液压油;将气源压力稳定调节至设定压力;远程控制进入气液泵气体的流量与压力;实时反馈气液泵的出口压力;压力超过设定值时的安全溢流功能;高压油手动卸荷功能。
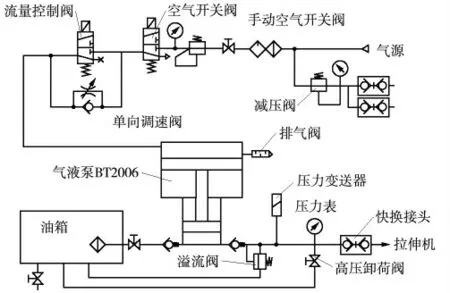
图1 气液系统原理
(2)电控系统通过监测拉伸量和压力数据控制气液系统气路的开关及流量,对气液系统输出的高压油的流量、压力进行控制,以实现拉伸过程的自动控制。该系统实行分级拉伸,确保多个螺栓拉伸的均衡性。
2 控制系统的设计和实现
2.1 气液系统设计
气液系统由手动空气开关阀、减压阀、空气开关阀、流量控制阀、单向调速阀、气液泵、压力变送器、高压卸荷阀、溢流阀等组成。其中,手动空气开关阀用于手动开启或关闭气源进气;减压阀用于准确调节气源压力,并且将工作气压稳定在2~7 bar(0.2~0.7 MPa);空气开关阀与电控箱连接,用于远程控制气源启闭;流量控制阀通过控制流入气液泵的气体流量来控制液压油升压的速率,从而控制拉伸速率;单向调速阀用于当流量控制阀断开时进行单向节流,使气液泵每分钟冲程数≤20 次/min;气液泵通过流经气源控制阀的气体压缩活塞,将油箱中的液压油抽出并增压;溢流阀用于当压力超出系统设定压力(出厂时设定120 MPa)时,将高压液压油排入油箱;压力变送器用于实时监测气液泵的出口油压;高压卸荷阀用于高压油手动卸荷。
2.2 电控系统
2.2.1 电控系统硬件设计
电控系统采用上位机和下位机组成的系统控制方案。其中,下位机采用美国国家仪器公司的NI Compact RIO 平台,选用NI cRIO-9075 集成化系统,它集成了400 MHz 工业实时处理器和LX25 FPGA,并具有4 个用于NI C 系列I/O 模块的插槽,在cRIO-9075 中插入数据输入输出模块以及串口通信模块,完成系统所需的数据采集以及通信功能;上位机选用X86 架构的工业平板电脑,配备高性能Intel 处理器,15 寸LCD 显示器,面板带按键控制(图2)。
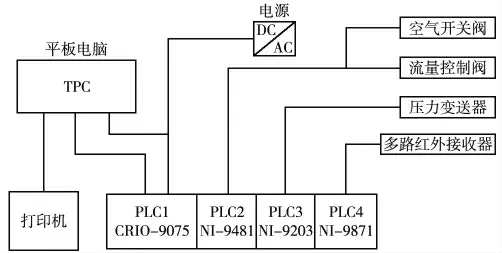
图2 控制系统硬件结构
2.2.2 电控系统软件设计
2.2.2.1 控制逻辑
螺栓拉伸机控制系统用于实现人孔盖的开关操作,控制关孔拉伸和开孔拉伸操作。关孔拉伸分为三次拉伸,开孔拉伸为一次拉伸,每一次拉伸流程类似。
关孔拉伸通过控制两个气路电磁阀—空气开关阀和流量控制阀来控制液压系统,从而最终控制螺栓拉伸的长度。第一次拉伸和第二次拉伸动作停止均取决于设定的液压系统压力值:当液压系统压力低于初设值时,空气开关阀和流量控制阀系统打开,系统处于较快速的拉伸阶段;当压力值达到初设值时,系统关闭流量控制阀,系统进入慢速的精细拉伸阶段;当压力值达到设定值时,系统关闭空气开关阀,拉伸动作停止。
第三次拉伸动作的停止取决于拉伸过程满足两个条件之一:一是液压系统的设定压力,二是螺栓拉伸量。液压系统压力低于第三次拉伸初设值时,打开空气开关阀和流量控制阀,进入较快速拉伸阶段。压力达到初设值时关闭流量控制阀,拉伸进入慢速的精细拉伸阶段。
2.2.2.2 软件模块
确定螺栓拉伸机控制系统硬件配置方案和控制逻辑后,使用Lab VIEW2012 的开发环境,设计了螺栓拉伸机控制系统软件。控制系统下位机为Compact RIO 平台,采用VxWorks 实时操作系统。上位机为X86 架构的工业平板PC(Personal Computer,个人计算机),采用WIN 7 操作系统。
(1)上位机软件。主要实现以下功能:提供控制系统状态和数据显示,参数设置,实现人机交互;发出控制指令到下位机;对拉伸数据进行存储,数据库管理及导入导出;与下位机进行数据通信;打印功能。
(2)下位机软件。主要实现以下功能:实时采集压力和拉伸值数据;对实时采集的压力和拉伸数据进行处理,计算得到相关的控制参数;接收上位机命令,与上位机进行数据通信;能独立控制两个气路电磁阀,上位机断电时不会造成螺栓过拉伸;报警与保护功能(表1)。其中,FPGA 为Field Programmable Gate Array 的缩写,是在PAL、GAL 等可编程器件的基础上进一步发展的产物;RT 是RealText 的简写。
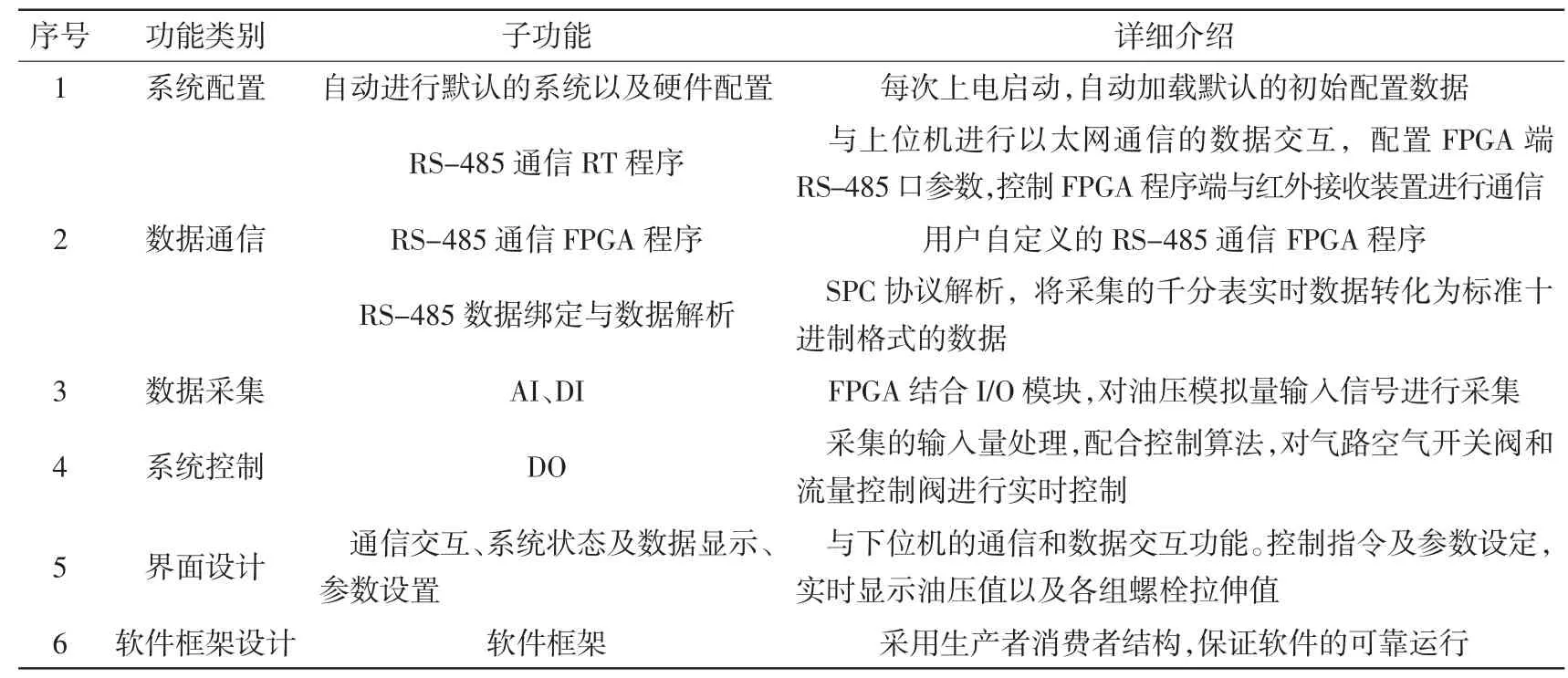
表1 系统软件模块功能
3 结论
本控制系统采用性能可靠的NI cRIO-9075 集成化系统作控制系统,结合Lab VIEW2012 开发环境的良好人机开发界面,实现了螺栓拉伸机对螺栓的的可控高精度拉伸。通过功能验证试验,本控制系统能实现螺栓拉伸机的全自动控制,能对螺栓拉伸量、剩余拉伸量、压力等进行实时监测、控制、记录、打印,操作简便,且在断电情况下也不会造成螺栓的过拉伸,安全可靠。
