纳米马达的驱动机理研究进展*
2021-02-07朱芳艳张田忠
朱芳艳,张田忠
上海大学 力学与工程科学学院,上海市应用数学和力学研究所,上海 200072
从自然演化、生命活动,到人类的生产生活,都离不开驱动,即通过一定作用方式使得物质产生定向运动。驱动过程中,往往伴随着能量的传递和转换。将其他形式的能量转化为机械能的机器称为马达。自然界中有形态功能各异的精密生物马达,为生命活动提供了基础保障。宏观世界里,人类也发明了多种马达,在机械、航空航天、交通运输等领域发挥着不可替代的作用。当人类认识世界的视角以及制造工艺的精度逐渐进入纳米尺度,开发类似生物马达的人工纳米马达,已成为学术界和工程界共同追逐的梦想。
早在1959年,著名物理学家费曼(Feynman)在一场题为“底部还有很大空间”(There’s plenty of room at the bottom)的演讲中就首次提出了纳米科技的概念,他认为“如果人类能够在原子或分子的尺度上来操纵物质,制备装置,我们将有很多激动人心的新发现”。近些年,随着科学技术的快速发展,人造马达已经实现从宏观尺度到纳米尺度的重要突破[1]。1983年,索维奇(Sauvage)等人[2]将两个环状分子连成链状,并将其命名为索烃,迈出了通往分子机器的第一步。在之后的研究中,他们发现索烃中一个环分子接收能量后可以绕着另一个环旋转,这是非生物分子机器的雏形。随后在1991年,斯托达特(Stoddart)等人[3]以极高的产率成功制备了轮烷,加热时环分子可以绕链转动。在此基础上,该团队还成功研制了分子电梯、分子肌肉和分子芯片等。费林加(Feringa)等人[4]则在1999年首次成功制备了一种在光作用下能够持续朝一个方向转动的分子马达。为了表彰这三位科学家为分子马达作出的卓越贡献,他们被授予了2016年诺贝尔化学奖,这无疑是对这个新兴领域的极大鼓舞,也预示着机器微型化的发展迈出了极重要的一步[5]。
当今世界正处于新科技革命的前夜,纳米科技作为发展最快的前沿领域之一,必将涌现出大量革命性成果影响和改变人类的生活。郭万林等人[6]提出的水伏效应(hydrovoltaics)可以利用纳米功能材料从水中捕获电能从而实现绿色发电;希尔斯(Hills)等人[7]制备了一个由碳纳米管构成的16位微处理器(RV16X-NANO),它可完全替代同类型的商用处理器。我国工业领域对于纳米芯片的应用,也正逐步追上世界前列,比如中兴通讯在5G无线基站的主控芯片上已经实现了自研7 nm芯片的市场商用。作为目前纳米科技领域重点关注的研究对象之一,纳米马达在诸多领域如药物输运[8-10]、微创手术[11-13]、环境治理[14-17]、传感监测[18-21]等等都有着广阔的应用前景,其结构设计、驱动原理、运动控制、制备方法等方面已经取得了重要进展[22]。根据纳米马达的驱动机制不同,可以将其分为物理场驱动、化学驱动和机械驱动等。在实际应用中,研究人员会依据各种驱动方式的优缺点选择合适的驱动方式或混合驱动方式,以适应不同场景的需求。本文主要介绍几类典型纳米马达的驱动机理,并结合目前纳米马达的研究现状,对其未来的发展前景进行初步展望。
1 物理场驱动
1.1 磁场驱动
自然界中,细菌通过鞭毛快速转动或摆动可以推动自身在低雷诺数流体中快速游动。科学家们从中获得灵感,研制出了各式各样的磁场驱动纳米马达。
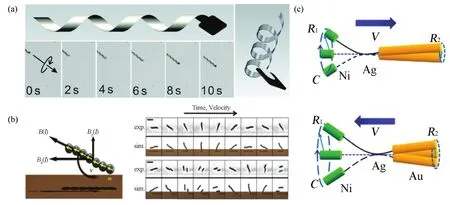
图1 磁场驱动纳米马达:(a)磁场驱动螺旋形纳米马达[23];(b)表面作用驱动微米马达[24];(c)柔性磁场驱动纳米线型纳米马达[25]
1.2 光场驱动
光能是一种易于控制并且高效的清洁能源,它本质上是具有不同波长的电磁波。目前最常见的光驱动纳米马达是利用紫外线或近红外光进行驱动的。
森(Sen)等人[26]发现去离子溶液中的氯化银颗粒在紫外光照射下,小颗粒会向大颗粒周围聚集。如果在溶液中添加二氧化硅颗粒,该颗粒在紫外光照射后会聚集在氯化银附近(图2(a))。董任峰等人[27]进一步提出了一种不需要添加外部燃料的纳米马达,由金和二氧化钛组成阴阳球结构(图2(b))。在紫外光照射下,马达在水环境中每秒可最多运动25个身长,马达的运动速度可通过调整紫外线光强进行调控。在之前研究的基础上,贺强等人[28]通过自组装技术制备了一种锥管状纳米马达(图2(c)),其在近红外光驱动下的平均运动速度可高达160 μm/s。研究人员在实验中可以远程控制纳米马达的启停,并进一步在细菌环境中实现了其定向运动,这表明该纳米马达具有很好的生物兼容性。该马达的驱动机理是由于金粒子对近红外光有很强的吸收能力,使马达周围环境温度迅速升高,产生明显的温度梯度,从而推动马达移动。并且,由于温度的迅速升高可以在马达表面形成大量蒸汽,极大地减小了马达与周围环境的摩擦力,增强了驱动效果。

图2 光场驱动纳米马达:(a)紫外线驱动二氧化硅颗粒(蓝色)向氯化银颗粒(红色)聚集[26];(b)紫外线驱动金/二氧化钛阴阳球结构向二氧化钛那一端移动[27];(c)近红外光控制锥管状纳米马达的启停[28]
1.3 声场驱动
超声波由于其良好的生物兼容性,在医疗领域有着广泛的应用。同时,作为高频声波,超声波具有很强的穿透力,常被认为是纳米马达理想的驱动方式之一。
马洛克(Mallouk)等人[29]通过电沉积法制备出的金属纳米线纳米马达(图3(a)),在超声波场的作用下,拥有高达200 μm/s的运动速度。线型纳米马达在垂直超声波场的作用下会在金属线的凹形端产生不对称的压力梯度,因此可以在液体中快速移动。特别有趣的是,当外部超声波的频率足够大时,溶液环境中的马达甚至会产生自组装现象,如自动排列成直线。考虑到全氟化碳溶液有较好的生物稳定性和生物相容性,卡根(Kagan)等人[30]将其置于卷曲的管状纳米马达内,如图3(b)所示。全氟化碳溶液在超声波环境里剧烈蒸发,产生巨大推力,推动马达以6.3 m/s的速度向前运动。类似地,约瑟夫(Joseph)等人[31]利用超声波驱动气泡产生聚集,聚集的气泡可以在极短的响应时间内(<0.1 s)驱动管状纳米马达,如图3(c)所示。
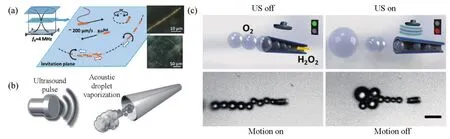
图3 超声波驱动纳米马达:(a)超声波驱动纳米棒[29];(b)超声波驱动包覆在管内的全氟化碳快速前进[30];(c)超声波驱动管状纳米马达[31]
1.4 电场驱动
在纳米尺度下,电能是相对比较容易在实验中提供的外部能源,所以早期的纳米马达有不少是用电场驱动的。
1995年美国橡树岭国家实验室[32]利用分子动力学方法模拟了碳纳米管在电场驱动下的转动。该纳米马达由双壁碳纳米管构成,在作为转子的内管两端分别施加正负电荷,在作为定子的外管上施加径向电场后,内管将会产生转动。2003年赛特尔(Zettl)等人[33]成功制备了电场驱动的纳米马达(图4(a))。它以碳纳米管作为轴承,碳管的两端与电极相连,并且在碳管的表面附着金属块以便更好地感应电场。当电极之间接通电流后,金属块可以绕碳管轴承运动。虽然通过控制外电场电极可以驱动外管和附着的金属块转动,但是方向随机。之后的研究进一步表明,在碳纳米管两侧施加电场可以驱动外管壁上的铟原子沿着碳管运动,完成微粒的输运[34]。利用电场在碳纳米管内输运水也引起了广泛的研究兴趣。尽管水分子整体上不带电,但由于水分子的偶极矩角度分布、相互作用不对称,碳管中的水分子在电场作用下同样可在管内定向运动。在梯度电场作用下,碳管中的水分子输运速度更快,输运效率更高[35-36]。
1.5 热场驱动
在纳米尺度上,温度梯度场也常被用于驱动。2006年,瓦尔特(Walther)等人[37]通过分子动力学模拟的方法,首次揭示了固固界面上的热泳现象。他们在一根碳纳米管的两端分别设置一个高温区域和一个低温区域,一定时间后在碳管上可以形成稳定的温度梯度。在温度梯度作用下,放置在碳管内部的金纳米颗粒会从高温区域向低温区域运动,运动速度可达10 m/s。2008年,巴雷罗(Barreiro)等人[38]在实验中成功设计并实现了利用温度梯度驱动的纳米马达(图4(b)),其马达结构与赛特尔(Zettl)等人[33]的马达类似。碳纳米管在两端通电后,自身发热,而连接碳管两端的电极具有散热作用,因此在碳纳米管中段与两极之间会形成方向相反的温度梯度。嵌在最外层的较短碳管上的金属块会向更近一侧的电极靠近,并且运动方向与电流方向无关,仅由温度梯度方向决定。大量的研究表明,温度梯度场还可以驱动水液滴[39]、黑磷片[40]或石墨烯褶皱[41]等沿着温度梯度方向从高温区域向低温区域运动。
2 化学驱动
2.1 化学场驱动
生物分子马达广泛存在生物体内,如肌球蛋白、氨基酸分子等,它们可以趋向某种特定的化学环境。早在1881年恩格尔曼(Engelmann)研究细菌光合作用时,就已经发现细菌倾向于向氧气含量高的区域游动[42]。这种生物对外界环境中的化学场所产生的趋向性称为趋化性。受此启发,科学家们基于趋化性设计了各种类型的化学场驱动马达。2007年森(Sen)等人[43]在实验中首次观察到2 μm长的金/铂纳米棒会自发向过氧化氢浓度更高的方向移动(图5(a)),并成功制备了化学场驱动的纳米马达。
②要从制度上保证水土保持工作正常开展,提高水土保持方案设计科学性,杜绝占用或挪用水土保持经费的情况发生,使施工单位保质保量完成水土保持设施建设。
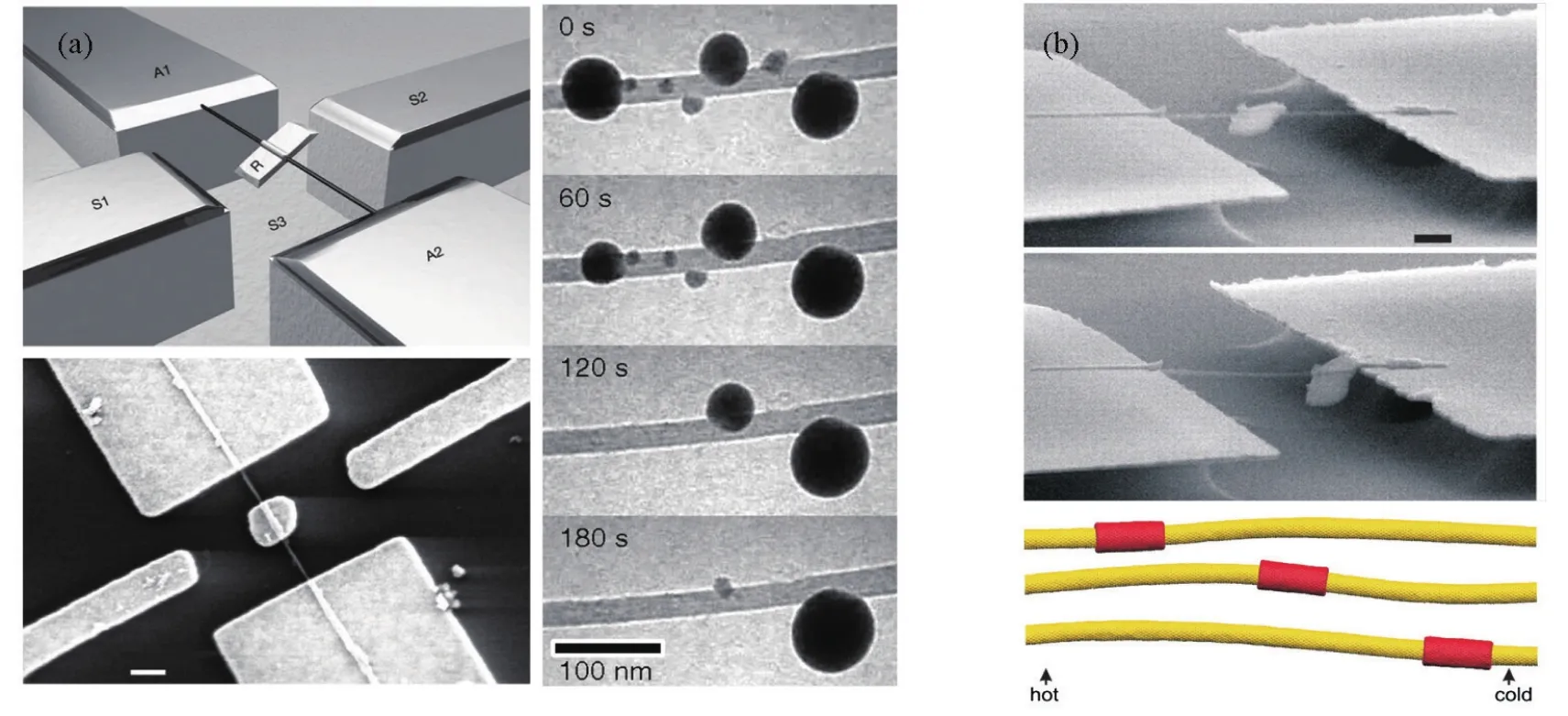
图4 (a)电场驱动纳米马达完成铟原子的输运[33-34];(b)热场驱动纳米马达[38]
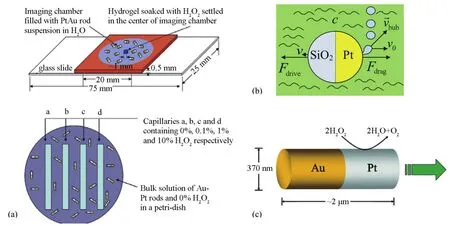
图5 (a)生物驱动纳米马达[43];(b)气泡驱动纳米马达[44];(c)自电泳驱动纳米马达[45]
2.2 反应物驱动
除了利用趋化性构建纳米马达外,还可以通过马达内部发生化学反应为马达提供动力。怀特赛德(Whitesides)等人[46]在2002年成功制备了世界上第一个通过化学反应驱动的人造微米马达。他们以过氧化氢为燃料,在铂的催化作用下,燃料发生氧化还原反应,因而在环境中产生大量微气泡。这些气泡在脱离过程中产生的反作用力会推动马达快速移动,故这种化学反应驱动又称为气泡驱动[44](图5(b))。添加催化剂、调整马达材料或设计马达的形状都可以显著提高催化效率,达到优化马达运动性能的目的。
除了利用化学反应的生成物推动产生动力外,还可通过化学反应产物在周围溶液环境中形成局部梯度场,如电场梯度、浓度梯度、温度梯度等,来推动马达产生定向运动[47]。2004年帕克斯顿(Paxton)等人[45]以多孔氧化铝过滤膜为模板,通过模板电化学沉积的方法成功制备了金-铂双金属纳米线型马达(图5(c))。在过氧化氢溶液中,纳米马达中金和铂的两端分别发生还原反应和氧化反应,使马达之间形成类电池结构。在这个电池的局部电场作用下,纳米马达会向铂端运动。这类纳米马达一般是利用化学反应后不对称分布的产物实现驱动。当燃料耗尽后,马达无法继续运动,这限制了马达的运动时间,因此这类马达除了需要考虑生物相容性,还需要考虑其工作寿命。
3 机械驱动
构筑具有力学梯度(如曲率梯度、弹性梯度、应变梯度、结构梯度、弯曲梯度等)的基底,同样可以对放置其上的物体实现定向驱动(图6)。

图6 机械驱动(mechanotaxis):(a)、(b)曲率梯度驱动(curvotaxis)[48-49];(c)刚度梯度驱动(durotaxis)[50];(d)应变梯度驱动(tensotaxis)[51];(e)弯曲梯度驱动 (flexotaxis)[52];(f)结构梯度驱动(angustotaxis)[53]
3.1 曲率梯度驱动
曲率驱动的概念最早在1994年由墨西哥物理学家明戈·阿尔库贝利提出。殷雅俊[54]为“空间弯曲诱发驱动力”这一命题提供了理论基础。郑泉水团队[48,55]在实验中发现黏附在圆锥管外表面上的液滴能沿着母线自发向粗端移动(图6(a)),同时通过分子动力学模拟确认了这种自发的定向运动方向与圆锥面的亲疏水性质无关,并且液滴的输运速度由曲率梯度决定。张田忠团队[49]则通过分子动力学方法设计了一种基于石墨烯的纳尺度曲率驱动装置(图6(b)),该装置由一片石墨烯基底和一片吸附于基底上的较小的石墨烯滑片组成。基底上的曲率梯度可使基底与滑片之间形成范德华势能梯度,从而推动石墨烯滑片发生定向运动。
3.2 刚度梯度驱动
刚度引发的定向运动最初是在观察生物细胞的运动时发现的。2016年,张田忠团队[50,56]利用分子动力学模拟发现纳米尺度上非生物物质也具有刚度趋向性。他们的计算表明,在具有刚度梯度的石墨烯基底上,石墨烯滑片会从刚度小的区域向刚度大的区域自发定向运动(图6(c))。这是由于在刚度较大区域,基底原子振动较弱,从而其与滑片间的范德华势能较小。当滑片与基底接触时,总是趋向于往能量最低的方向运动,因此会滑向刚度较大的区域。刚度梯度驱动推动了利用材料内禀属性实现纳尺度驱动的研究。
3.3 应变梯度驱动
2014年陈少华团队结合实验[51]、理论分析[57]及分子动力学模拟方法[58]系统研究了基底表面应变梯度场对放置在基底上宏观、微观物体驱动行为的影响,提出了一种在宏观尺度和微纳尺度下均可应用的基于应变梯度的驱动机理。如图6(d)所示,宏观模型实验证实了乳胶泡在黏弹性基底上的弹性应变梯度场的驱动下会发生定向滚动。分子动力学的模拟则进一步证实了纳米颗粒同样可以在应变梯度场的驱动下发生定向运动,即物体会由大应变处向小应变处运动,并且驱动力由基底应变梯度场的大小决定。倪勇团队[59]利用分子动力学模拟和理论分析,表明水滴也可在应变梯度的驱动下产生定向运动。
3.4 弯曲梯度驱动
最近,张田忠团队[52]提出了弯曲梯度驱动原理。他们在分子动力学模拟中观察到,石墨烯滑片如果放置在发生弯曲变形的金属(银)悬臂梁上,会发生定向运动。如图6(e)所示:在悬臂梁的受压侧,石墨烯滑片会向固定端运动;而在梁的受拉侧,石墨烯滑片则向自由端运动。换言之,石墨烯滑片能感知到基底的弯曲梯度。其物理机制在于,弯曲梯度导致纳米梁表面形成原子密度梯度,而原子密度越大的地方,滑片与基底之间的范德华势能越低,从而为滑片提供了驱动力。石墨烯片在弯曲梁上呈现出的机械感知能力,使其有望作为传感元件在未来智能纳米器件领域得到应用。
3.5 结构梯度驱动
除了改变基底的力学特性或产生变形,也可以通过构造特殊的基底结构实现驱动。张田忠团队[53]利用分子动力学模拟计算,表明放置在楔形金属板之间的碳纳米管会自发地向狭窄端运动(图6(f))。碳管的运动还可以有效推动在前进路径上的其他物体,如富勒烯球、石墨烯片或固体颗粒等,因此可用于清洁楔形纳米通道。理论分析揭示,当碳纳米管处于楔形通道的窄端时,它与通道之间的接触面积更大,因此系统势能更低,这为碳管的自发运动提供了驱动力。
4 结论与展望
纳米马达根据其驱动机理的不同可以分为不同类型,其本质总是将其他形式的能量转换为机械能从而实现定向运动。如何设计出能够满足实际需求的人造纳米马达一直是纳米科技的前沿热点,然而在面向实际应用时,纳米马达仍具有一些局限性需要在未来的研究中进一步攻克,其中包括:
(1)现有的人造纳米马达虽然可以通过控制外场、更换化学反应催化剂等方法控制马达的运动方向和速率,但是对运动的控制不够精准,因此需进一步探索新型可控纳米驱动原理。
(2)无论外场驱动还是机械驱动,都需要给被驱动物提供一定的能量梯度实现定向运动,而单一器件无法完成较远距离的物质输运,因此需要构筑新的可串联驱动的设计原理,实现长程输运。
(3)化学反应驱动的人造纳米马达大多依赖化学反应时间,运动维持时间短,并且部分纳米马达所需的燃料(如过氧化氢溶液)生物相容性较差,极大地限制了纳米马达在生物医疗等领域的应用与发展,因此需要提高纳米马达的生物相容性。
(4)实际应用中纳米马达所处的环境总是复杂多变的,因此发展能及时对环境变化作出判断并随之调整其行为的智能纳米马达,也是今后值得深入研究的重要课题。
纳米科技飞速发展,纳米机械(机电)系统的应用前景广阔,人类对纳米马达的需求日益增强,其中蕴含着巨大的市场潜力,同时更面临严峻的科学前沿挑战。纳米驱动原理的复杂性、多样性为物理、化学、力学、材料、机械、能源等多学科交融、多领域协作提供了重大契机,也为培育未来技术、培养创新人才、取得原始创新提供了重要机遇。
