矿用液压支架电液控制系统的开发设计与研究
2021-02-07赵青山
赵青山
(霍州煤电集团有限责任公司辛置煤矿,山西 霍州 031400)
煤矿井下综采工作面将采煤机、输送机、液压支架完全融合,实现了真正意义上的自动化开采运输。这种方式从根本上改变了传统煤炭开采的方式,一体式全流程开采实现了从煤炭开采到运输的各个环节的机械化、自动化作业,最大程度节约了煤矿的人力成本,保证了煤矿工人的生命安全。近年来随着智能化、数字化技术的发展与普及,机械化的综采工作面也走上了智能化的道路。常见综采工作面设备布局如图1 所示。
1 液压支架概述与现状分析
液压支架作为井下开采中“三机配套”的重要一环,为采煤机、输送机以及一线采煤工作者提供支护与保护,与采煤机、输送机相互配合来完成采煤的一系列动作。在采煤时,一线工作人员可以将身体完全掩蔽在支架顶板之下,液压支架有效地保护了工人的生命安全。在辛置煤矿常见的液压支架为双立柱支撑掩护式液压支架,双立柱的结构保证了支架可以承载更大来自巷道四周的压力,安全空间也会相对更多。双立柱支撑掩护式液压支架结构如图2 所示。
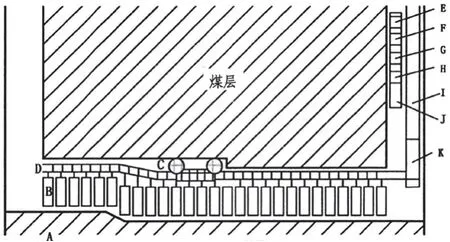
图1 综采工作面设备布局图

图2 双立柱支撑掩护式液压支架结构图
由于辛置煤矿地质情况较为复杂,导致工作面中液压支架在工作过程中经常处于过载状态,长时间的超负荷运行导致该矿液压支架重要部件磨损较为严重,支架动作精准度差,甚至会出现不受控制的现象。同时,由于保养不到位,导致支架出现故障率很高的问题,严重威胁井下安全生产。液压支架的电液系统作为支架的核心部分,欲解决支架现存的问题,需从支架的电液控制系统入手,提高系统的综合性能。
2 电液系统的改进设计
2.1 电液控制系统总体设计
在液压支架中需要油缸等元件的动作配合才能实现支架在工作过程中的开合,以及与采煤机、输送机相互配合完成自动化采煤动作,做到工艺全流程的自动化,而支架的这类动作的控制都是来自于电液控制系统。系统不仅需要实现动作而且还应该监控支架的运转,第一时间了解支架的工作状态,保障支架以及现场人员的安全。工作面中的支架一般为多台配合动作,为了更好地实现机器的单动与联动配合,将每个支架都配备一台独立的控制器,同时在每台控制器安装独立的电源,实现多台支架的并联。当一台出现故障时,其余多台继续保持正常工作,同时各台之间采用以太网进行连接,直连中央控制主机,由主机下发指令,多台支架完成配合作业。改进后的液压支架电液控制系统总体框架如图3 所示。
2.2 单支架电液控制系统结构设计
液压支架之间相互独立,每台支架上的控制箱中有支架的控制器、传感器以及红外仪等,组成了一个独立的控制系统。控制器由PLC 组成,能够通过电磁阀组实现信息的交互,控制支架的动作;传感器主要由位移以及压力传感器组成,用于检测支架的实时位置以及油缸管路等的状态,并将信息显示在主控计算机屏幕上;红外检测仪由发射器与接收器两部分组成,主要用于采煤机的位置检测以及支架跟机位置检测。该系统真正意义地实现了集电源供应、信息采集、屏幕显示以及控制响应一体化,实现了支架的推溜移架自动化。图4 为支架电液系统结构设计图。

图3 液压支架电液控制系统总体框架图

图4 支架电液系统结构设计图
2.3 支架电液系统硬件结构设计
上述所提到的单支架电液控制系统结构设计中,支架的控制箱主要由3 大部分组成,其中硬件结构的主要逻辑框图与结构设计图一致,主要包括电源、显示器、红外仪、电磁阀组以及传感器等。对元器件选型会直接影响最终系统的执行。表1 为主要元器件的选型明细。

表1 部分元器件的选型明细
2.4 支架电液系统软件系统设计
支架主要的动作包括立柱的升降以及推溜移架,软件的设计主要针对这两个部分来进行。
2.4.1 支架立柱升降程序设计
支架的立柱升降动作通常由中央控制主机来控制,通过触发开关,将预设位移压力信号传输至所选支架的PLC 中,后将信号通过电磁阀转换,来执行对立柱动作的控制。同时,支架的位移以及压力传感器将数据实时传输,当实际值达到预设值时,电磁阀自动关闭,结束支架动作,完成立柱升降。为了实现整个动作过程的准确性以及平稳性,需要赋予程序较强的逻辑性。立柱升柱动作的流程图如图5 所示。
2.4.2 支架立柱升降移架联动程序设计
支架工作过程中其动作一般为联动,即为立柱的升降与支架的移架相配合。其中支架的推溜移架与立柱升降工作过程相类似,即为触发信号,传至电磁阀(不同功能对应不同的电磁阀),后执行动作。支架的联动程序流程图如图6 所示。
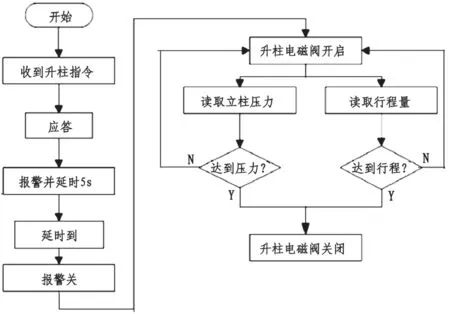
图5 立柱升柱动作流程图
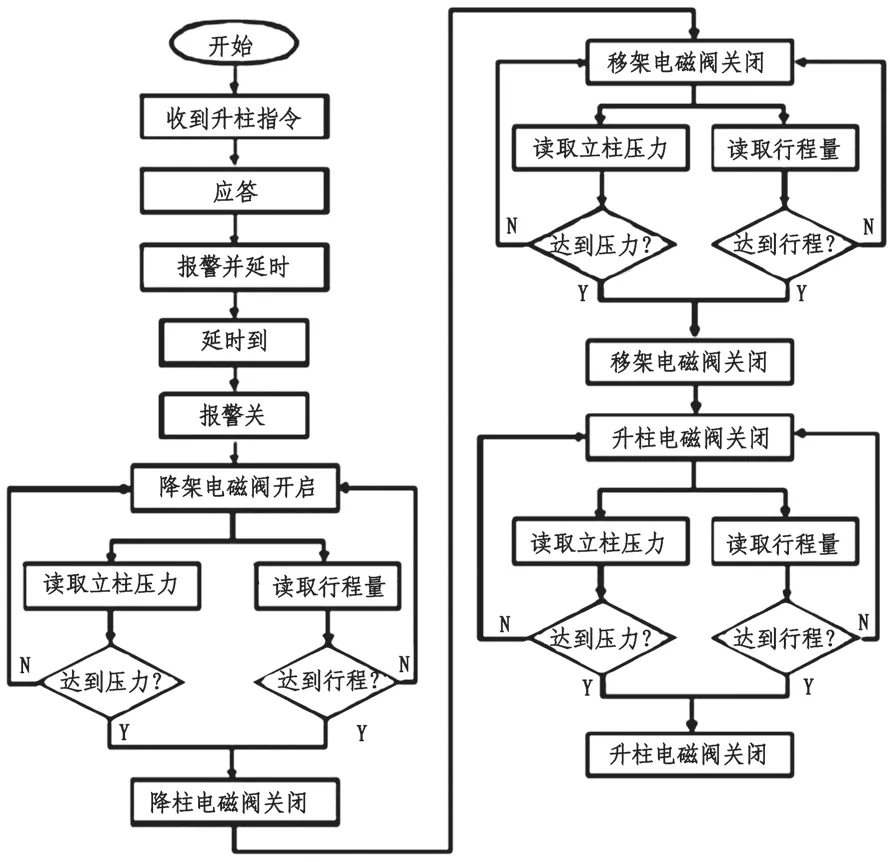
图6 支架联动程序流程图
3 结语
液压支架电液控制系统在一定程度上会对支架的寿命造成影响,为了解决现用支架灵敏度低、故障率高、配合较差的问题,本文对原有电液系统进行改进设计,将PLC 技术运用到电液控制系统的设计中,搭建了一个全新的自动化支架电液控制系统。该系统既实现单个支架个体化,支架之间可以互不影响,同时又可以实现配合联动,实现了支架的精准化控制,降低响应时间,提高了设备的灵敏度与可靠性,值得进一步推广。