浅析轨道车在智能药房中的应用设计
2021-02-07刘明德范微波李晓燕
刘明德,苏 芸,王 江,范微波,李晓燕
(江西机电职业技术学院,江西 南昌 330013)
0 前言
智能药房直接对接医院的处方系统,患者缴费后系统自动发药,发药准确,效率高,节省人力成本。 我国越来越多的大医院正在逐步向着智能化方向发展。 智能药房极大地提高了发药速度,药房受空间的限制,不便存放太多的药品量,使得有些常用药需要经常添加补充。 为减轻人工负担,加药机器人的需求也越来越大。 为此,笔者设计了一款智能药房的加药机器人行走机构。
1 技术需求分析
在智能药房中,使用加药机器人对药柜加药,对机器人的行走机构有其特殊要求。 行走机构既要能够在存药的库房到发药的药房间行走,还要能在狭窄的药柜间巷道中行走,因此车体的宽度要窄,要小于巷道的宽度。 由于智能药房中的药柜都较高,加药机器人的机械手动作位置也必须能达到较高位置,从而容易导致机器人的重心偏移较大,一般车辆容易侧翻。 要保证小车稳定可靠、晃动小、不翻倒是设计的重点。 另外,小车还要能准确定位到目标位置,便于准确取药和加药操作[1-2]。
2 结构设计
药房场地特点是地面较为平直,药柜间的通道基本是以行列排布,适应于轨道车行走方式。 而一般的轨道运输车在转弯时转弯半径过大,不便于在药房中使用。 为解决这一问题,采用在交叉路口位置设置转向台,当轨道车完全进入到转向台后,控制转向台旋转90°,停在转向台上的轨道车即可就地转向90°,消除了转弯半径的问题。轨道车的驻车制动采用夹轨方式可以防止停止的车辆发生移动和倾斜,对机器人的取药或加药动作可提供准确定位的条件[3-5]。
2.1 轨道总体布局
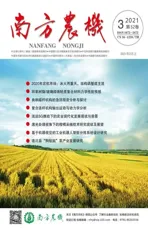
因各家的药房和库房布置情况各不相同,不失一般性,本文仅以一条纵向轨道和两条横向轨道的简单模型进行说明。如图1 所示,固定轨道由纵向轨道(1)和横向轨道(2)形成行列交叉,在纵向轨道(1)与横向轨道(2)的交叉位置处断开。在断开位置均设置转向台(3),通过转向台(3)上的连接轨道实现各轨道间的连通。
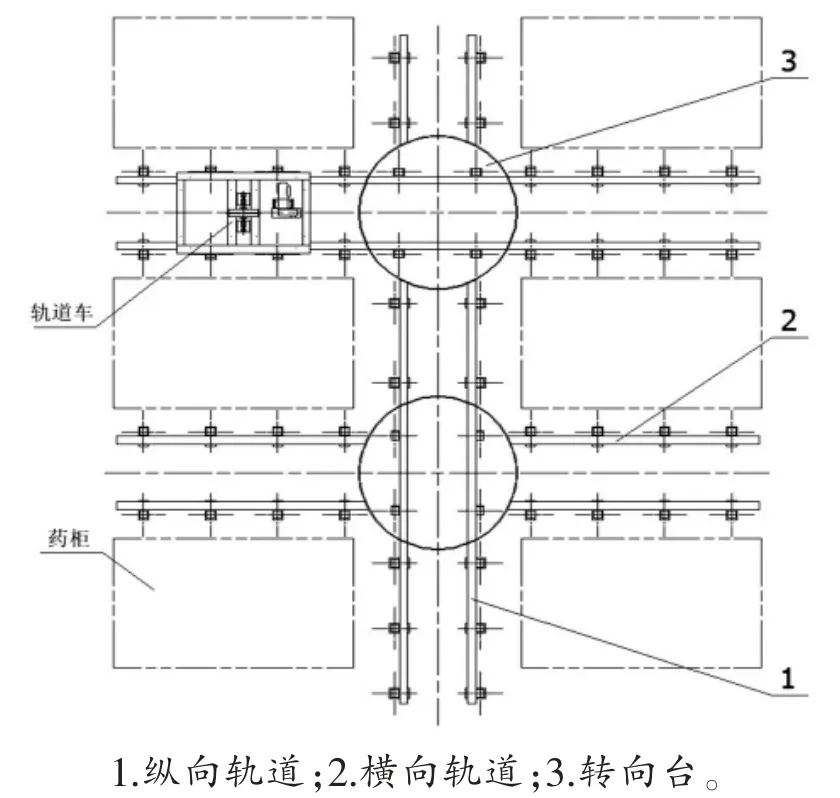
图1 轨道总体布局
轨道用槽钢制作,每条轨道的两根轨道槽口相向布置。 轨道车的车轮在轨道槽内行走。
2.2 转向台

图2 转向台
转向台可将交叉位置的固定轨道实现连通作用,可直行通过,也可转向90°通过。 如图2 所示,转向台由圆形的台板(1)为主体,其上固定有连接轨道(2),连接轨道(2)可以将在交叉处断开的纵向轨道或横向轨道连通。 在台板(1)的下方中心位置有旋转轴(3)和转轴座(4),还有控制台板(1)旋转的驱动机构(5)。 为了加强台板的稳定性,还设置了支撑轮(6)。 为控制转向台的连接轨道(2)与纵向轨道或横向轨道准确对接,特设置了定位锁紧装置(7)。在轨道对齐后,定位锁紧装置(7)将台板(1)锁紧固定。 当台板(1)需要旋转时,定位锁紧装置(7)解锁,然后才能在驱动机构(5)的控制下,使台板(1)旋转。
2.3 轨道车
如图3 所示,轨道车的车轮(1)在轨道槽内行走,可以保证车体不倾翻。 采用单轴驱动方式,由步进电机(2)驱动,可以根据需要随时控制运行速度,也方便实现正反转控制。在车辆停止时,利用驻车制动器(3)进行固定。驻车制动器(3)采用夹轨的方式制动,将轨道车锁定在轨道上,保证位置不移动。 轨道车在轨道上的实际行走距离专门设置有位移测量装置(4)。 位移测量装置(4)安装在轨道车上,其压轮始终保持与轨道紧密接触。 压轮随着轨道车的行驶而转动,其转动的角位移转换成编码器的输出编码,从而换算出轨道车的行走位移量。 绝对编码器的输出还可以识别轨道车的行驶方向。 通过位移测量装置(4)的反馈信息,可以使轨道车的移动定位形成闭环控制,保证定位的高精度。
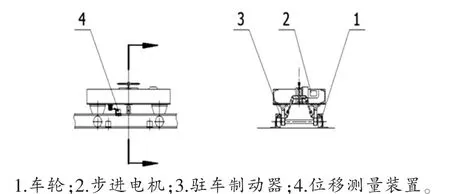
图3 轨道车
3 控制系统设计
控制系统采用集散式控制方式,总控制台为车辆运行的控制中心,既需要控制轨道车运行,又要控制旋转台的转向,还要负责与智能药房发药系统和库房管理系统的数据交换。
图4 控制系统框图
如图4 所示,图中列出了一台轨道车和两个转向台的控制系统框图 (未含车载设备部分)。 加药机器人总控制台通过串行通信与智能药房发药系统及库房管理系统连接。 总控制台与轨道车随时保持双向的无线通信,保证轨道车顺利执行总控制台安排的任务。 旋转台的旋转控制由总控制台直接发信号进行控制。 旋转台的状态由对应的传感器发信号传给总控制台。
3.1 总控制台
加药机器人总控制台接收到智能药房发药系统的药柜缺药的信息(包括药柜地址编号、药品名称和药品包装规格等)后,向库房管理系统提出需求信息(药品名称、药品包装规格和数量等),如果库房管理系统中确认该药品有库存,则将库存地址编号发送给总控制台;否则,给出库房缺药的提示信息。
总控制台在收到库房管理系统的库存地址编号后,则把库房的药品库存地址和药房的药柜地址以及轨道车的规划路径发送给轨道车。 总控制台还需要合理安排转向台的动作节奏。 在轨道车需要经过转向台位置之前,需控制转向台作好提前准备,转向台准备就绪信号由总控制台发送给轨道车。 如果转向台需要载着轨道车转向时,总控制台在控制转向台完成转向动作后,还要给轨道车发信息通知其可以驶离转向台。
3.2 轨道车行走控制模块
轨道车的任务是运送车上载荷(包括货架、药盒和机械手等)从库房到药柜间的行驶。 1)要找到库房中取药的位置;2)要找到药房的需加药的药柜位置。
当轨道车需要驶入或驶离转向台时,转向台的连接轨道必须处在与对应固定轨道对接状态。 轨道车通过转向台只存在两种情形:1)直行通过转向台;2)经过转向台拐90°弯。
3.2.1 直行通过转向台
当轨道车需要直行通过转向台时,轨道车需收到总控制台发出的转向台准备就绪信号,才能让轨道车进入到转向台并直行通过,否则必须在转向台附近等待。 一般正常情况下,转向台都是在总控制台的协调下提前准备就绪,这样可提高轨道车的总体运输效率。
3.2.2 经过转向台拐 90°弯
轨道车需要通过转向台拐90°弯时,首先是要将轨道车驶入到转向台上,然后转向台旋转90°,轨道车再驶离转向台。 轨道车需要收到总控制台发来的转向台准备就绪信号,才能驶入到转向台,否则需在将要驶入的转向台之前停下来等待。 当轨道车停在转向台后,转向台在总控制台的控制下载着轨道车旋转90°,轨道车收到总控制台驶离信号后,方可驶离转向台。
3.3 转向台的控制
转向台由总控制台集中控制。 每个转向台需要两路控制信号,分别控制转向和定位锁紧。 每个转向台还需要采集两个位置信号,一个转向台纵向到位信号和一个横向到位信号。 当转向台需要转向时,总控制台先将定位锁紧装置解锁,然后发送旋转信号,改变当前转向台方向(如果当前是纵向位,则将其变为横向位;如果当前是横向位则将其变为纵向位)。 当转向台旋转到位后,总控制台控制锁紧装置将位置锁定。
3.4 轨道车的位置标记
轨道车所处的位置有两种标记,一种用于轨道车自身采集位置信号,一种用于总控制台采集轨道车当前位置。
3.4.1 轨道车自身位置采集标记
任意一段固定的纵向轨道或横向轨道都会连接到转向台,末端轨道只有一端连接到转向台。 轨道车的行进方向可归纳为驶入转向台(从固定轨道驶向连接轨道)和驶出转向台(从连接轨道驶向固定轨道)两种。 驶入转向台的轨道后段需要设置两个标记位置T1 和T2,T1 比T2 离转向台边沿的距离远。 在轨道车需要驶入转向台前,需要收到总控制台发来的转向台准备就绪信号,否则,轨道车在T1 位置开始就要减速,并在到达T2 位置就要停车。 在转向台中间位置设置T3 标记,表示轨道车已完全进入转向台。 在轨道车完全驶出转向台后,如果进入到末端轨道段,设定T4 标记,用于编码器误差修正。
3.4.2 总控制台采集轨道车位置标记
对于总控制台而言,并不需要获取轨道车的精确定位,只需要了解轨道车处于哪段轨道上或是在哪个转向台上。 因此,一个运行方向上,每段固定轨道只需在的首端附近各设置一个轨道车检测位,用于检测轨道车完全进入该段轨道。两个运行方向则需要两个检测装置。对于末端轨道,只需要在靠近转向台侧设置一个检测装置。 在每个转向台上也需要各设置一个轨道车检测装置,用于检测轨道车是否完全进入转向台。
由于总控制台是预先知道轨道车的规划路线的,它还需要根据轨道车的位置控制转向台的动作节奏和给轨道车发通知信息。 当轨道车进入到某段轨道并收到首端检测确认后,就要控制即将到达的转向台作好轨道连接准备。 如果转向台需要转向,总控制台在收到该转向台检测装置发来的到位信息后,控制转向台转向。
4 结语
轨道车技术一般应用在重载荷运输中,将其轻量化设计应用到智能药房中,可实现加药机器人的平稳运行不侧翻。 通过采用夹轨方式进行驻车制动,保证轨道车定位牢固;通过外置的转向台转向方式,实现了在小空间里的轨道车无转弯半径转向功能;使用末端轨道设置定位标志的方法,可消除编码器测距的累计误差,可保证轨道车的定位精度。 若对现有智能药房进行改造升级,则存在较大的施工工作量。