仿人智能控制算法在控制系统中的应用
2021-02-02张秋颖张文钢
张秋颖,龙 松,张文钢
(武昌首义学院,武汉 430064)
0 引言
随着永磁材料性能的不断提升和成本的降低,采用永磁材料的各类电机,特别是永磁同步电机(Permanent Magnet Synchronous Motor,PMSM),已经在电动汽车、风能开发、轨道交通、船舶推进等领域得到了应用。针对永磁同步电机的控制技术,基本是以交流异步电机的控制技术为基础,从控制系统结构上看,目前主要有矢量控制技术和直接转矩控制技术两种,每种控制技术中涉及的具体控制器基本为经典PI控制器[1]。
永磁同步电机是一个多变量、强耦合、时变的非线性系统,应用经典控制方法对其进行控制,需要做两方面的简化:一是为建立电机的数学模型,需要对电机的物理模型进行简化,如假设绕组对称分布、磁场沿气隙圆周呈正弦分布,忽略铁心损耗、磁滞损耗和电机参数变化等;二是在控制器设计中需要对系统进行简化,如忽略系统的高次项、小惯性环节的近似处理等[2]。基于上述简化而设计出的控制器存在继续优化的空间。
智能控制技术的发展为永磁同步电机的控制带来了新思路,如文献[3]将模糊PI方法引入永磁同步电机的位置环控制,分析了模糊控制系统的构成以及实现方法;文献[4]针对永磁同步电动机抖振问题,提出了一种具有消抖作用的高阶滑模控制算法。本文主要研究智能控制技术中一类重要的控制技术——仿人智能控制在永磁同步电机控制系统中的应用,以期能为永磁同步电机的控制系统设计提供参考。
1 永磁同步电机数学模型和控制系统结构
永磁同步电机 dq转子坐标系理想动态数学模型如下:
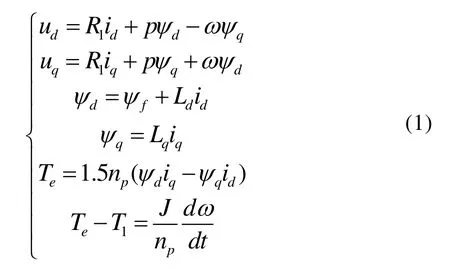
式中,ud、uq—电机定子电压dq轴分量;id、iq—电机定子电流dq轴分量;ψd、ψq—电机定子磁链dq轴分量;ψf—电机定子绕组一相永磁磁链幅值;Ld、Lq—电机定子dq轴励磁电感;R1—电机定子绕组一相电阻;p—微分算子;ω—电角速度;Te—电磁转矩;T1—折算到电机轴端的负载转矩;J—整个机械负载系统折算到电机轴端的转动惯量;np—极对数。
基于上述数学模型,永磁同步电机矢量控制系统结构如下图所示[2]。
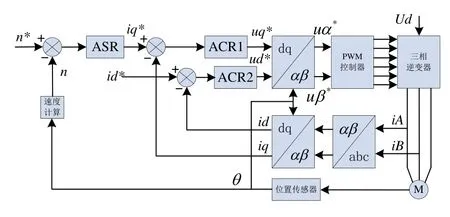
图1 永磁同步电机矢量控制系统结构图
图中,ASR为速度控制器,ACR为电流控制器,一般用工程设计方法将控制器设计为典型PI控制器。此种设计方法优点是理论成熟、设计简单,缺点是建模和控制器设计中做了一系列简化处理,即没有充分利用控制系统的特征信息,控制效果有待进一步提高。
2 仿人智能控制的原理和设计
在实际的控制过程中人们发现:在得到必要的操作训练后,由人实现的控制方法是接近最优的,这个方法不需要了解控制对象的结构参数,也不需要最优控制专家的指导。人的控制活动反映了人脑的高超思维、决策和控制能力,仿人智能控制即以模拟人脑宏观结构和行为功能为基础。仿人智能控制的基本思想是在控制过程中利用计算机模拟人的控制行为功能,最大限度地识别和利用控制系统动态过程的特征信息,进行启发和直觉推理,从而实现对非精确数学模型控制对象的有效控制。
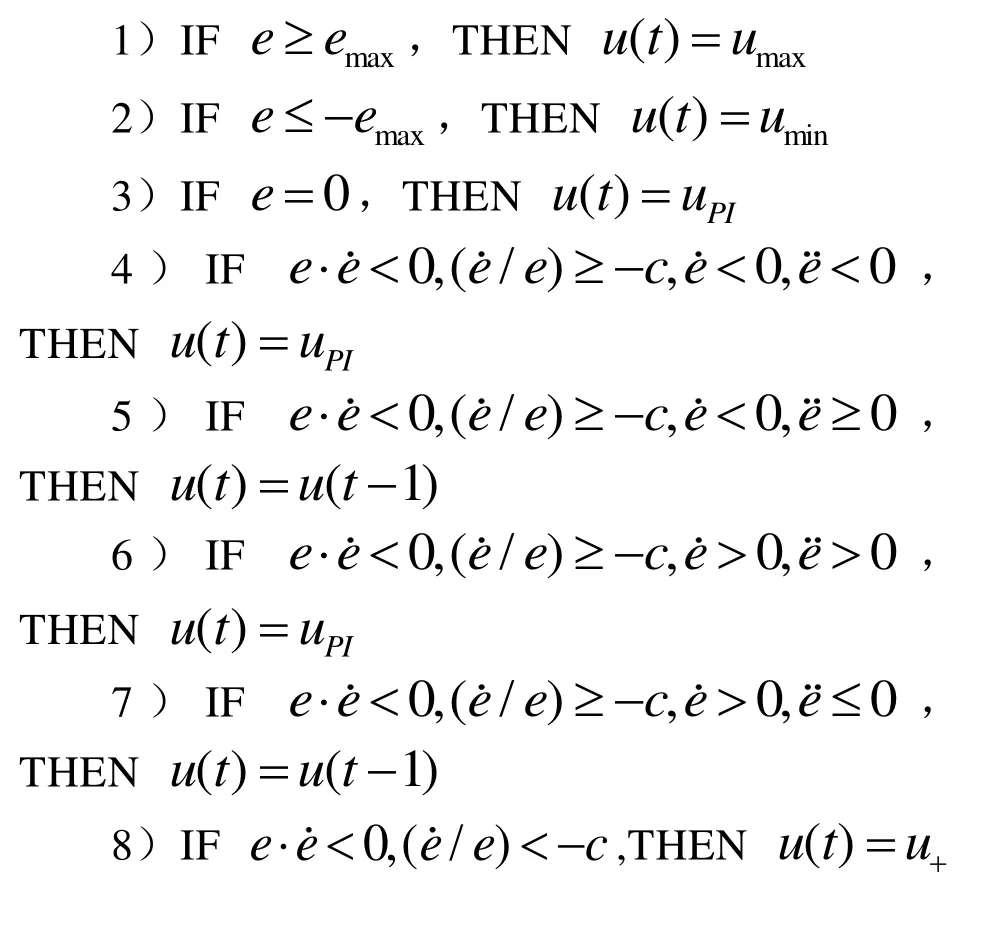
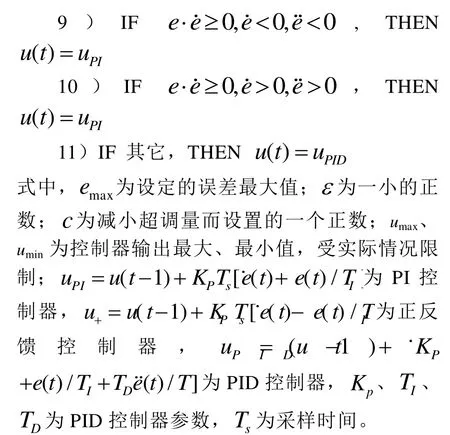
针对永磁同步电机,仿人智能控制器的设计思想为:当系统误差较大时,控制器输出为最大或最小,以尽快减小误差;当系统进入稳定区域时,系统在惯性作用下趋向平衡点,控制器采用保持控制,即控制器输出不变,以释放系统的惯性能量,防止造成超调;若系统离开稳定区域,超调不可避免时,采用正反馈控制器减小超调;在其它情况下,采用经典PI控制器或PID控制器。
基于上述思想,得控制规则如下:
3 仿真验证
取永磁同步电机的主要参数如下表。
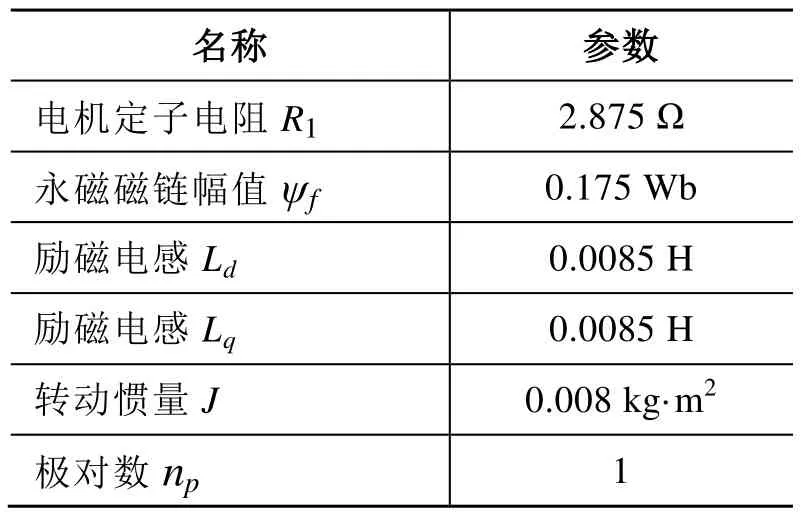
表1 永磁同步电机主要参数
建立永磁同步电机转速矢量控制模型,如图2所示。ASR、ACR为采用工程设计法设计的经典PI控制器,电机空载起动,0.1 s时加载5 N·m,取额定转速为2000 r/min,仿真结果如图3所示。
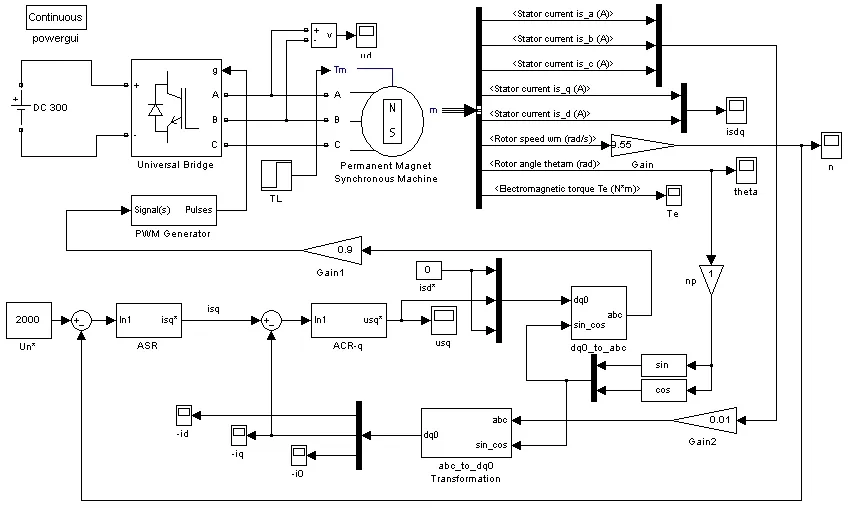
图2 永磁同步电机矢量控制系统仿真模型
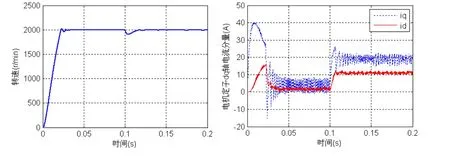
图3 经典PI控制器仿真结果图
应用仿人智能方法设计ASR速度控制器,控制器相关参数如下表。仿真结果如图4-7所示。
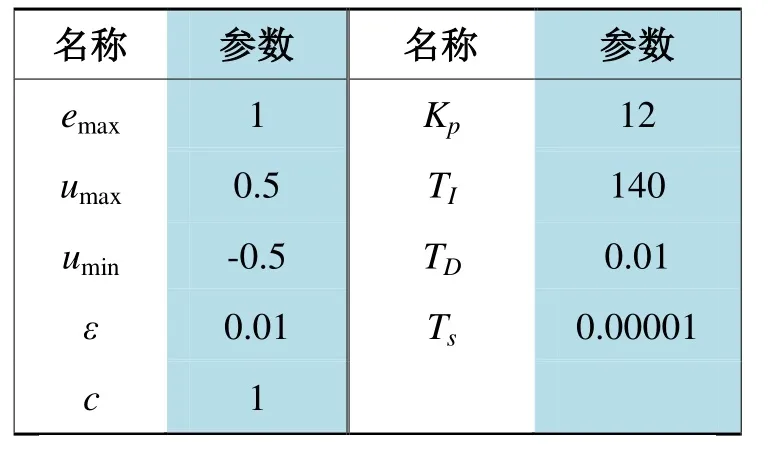
表2 仿人智能控制器参数

图4 仿人智能控制器仿真结果图
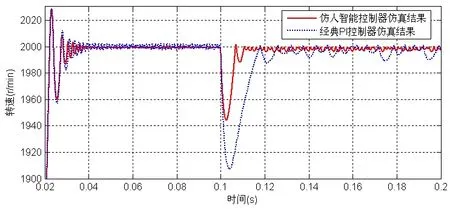
图5 转速仿真结果局部放大对比图
从图5可以看出,与经典PI控制器相比,仿人智能控制器控制的转速波动小,在负载变化时,恢复时间短,动态扰动小;由图6、7可知,仿人智能控制器的iq波动小,id基本相同,由式(1)中转矩方程可知,在id相同的情况下,转矩与iq成正比,iq波动小时,转矩波动小,进而转速波动小,这与图5是对应的。
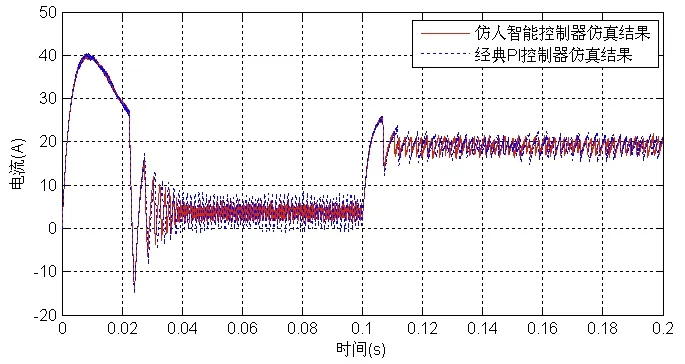
图6 q轴电流分量仿真结果局部放大对比图
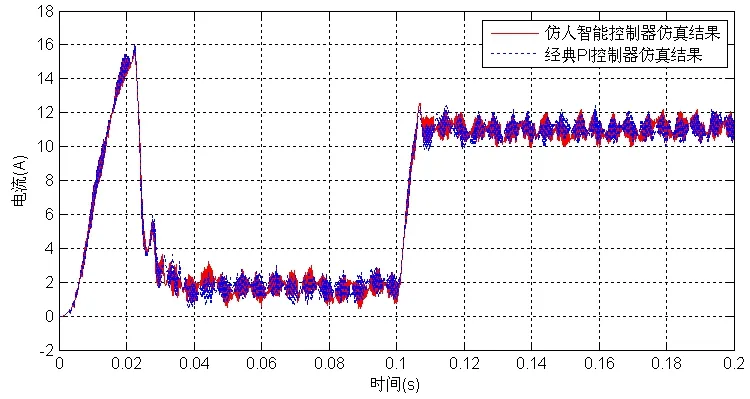
图7 d轴电流分量仿真结果局部放大对比图
4 结束语
仿人智能控制的优点是设计简单,只需要几条规格,即可设计出较好的控制器,缺点也是明显的,这几乎也是所有智能控制技术的共有缺点,即智能控制技术目前还没有形成类似经典控制那样的完整的理论体系,控制器的参数设计、稳定性分析、参数与性能指标的关系等没有严格的理论分析,只能通过经验、试凑等方法进行设计。建立完整的理论体系,这是仿人智能控制技术和其它智能控制技术今后的研究目标。
