采用统一虚拟阻抗控制的逆变器并联系统
2021-02-01林燎源戴宇杰朱铠项雷军
林燎源, 戴宇杰, 朱铠, 项雷军
(华侨大学 信息科学与工程学院, 福建 厦门 361021)
随着微电网技术的应用与发展,作为可靠运行核心技术之一的多逆变器并联控制技术[1]受到越来越多的关注.而下垂控制因能实现多逆变器的自主并联运行,受到了广泛的研究和应用[2].然而,在现有的逆变器并联系统中,由于各逆变器等效输出阻抗与输出连线阻抗的差异,传统下垂控制方法会引起功率分配误差,产生系统环流,影响系统的稳定运行[3-4].目前,主要解决方法是添加虚拟阻抗,一般通过输出电流构造电压降落,调节指令电压.引入虚拟阻抗后,系统阻抗可以灵活地设计为感性[5]、阻感性[6]、阻性[7],甚至容性[8],以减小各逆变器的阻抗差异,提高功率均分精度.文献[9]通过引入虚拟负电阻抵消系统阻抗中的阻性成分,降低功率耦合,减小由线路电阻造成的系统电压降落.文献[10]在低压微电网逆变器的控制策略中引入动态虚拟阻抗,减小功率耦合、电压降落和环流,实现对输出电能质量灵活有效的控制.
上述文献中的虚拟阻抗均在各逆变器中单独控制,但随着并联逆变器数量的增加,在并联单元投切、冗余轮流休眠(不间断电源系统中常见)、功率权重变化等工况下,虚拟阻抗的控制逻辑较为复杂,会对供电的可靠性产生影响.基于此,本文提出一种统一虚拟阻抗控制方案,使各逆变器所需的虚拟阻抗值在统一虚拟阻抗控制器中进行调节.
1 逆变器单机控制
以单相逆变器为例,逆变器控制框图,如图1所示.图1中:逆变器采用全桥拓扑及经典的电容电压外环和电感电流内环双闭环控制[11],GV,c(s),GI,c(s)为对应的调节器;L,C分别为输出滤波的电感和电容;R为电感的等效串联电阻;Vo为逆变器的输出电压;IL为电感电流;Vdc为直流电压;Rl为负载;Io为逆变器的输出电流;Vref为给定的参考电压.为增强参考电压的跟踪能力,引入输出电流前馈,kf为前馈系数.
电压环和电流环采用比例积分调节器,GV,c(s)和GI,c(s)的表达式分别为
GV,c(s)=kV,p+kV,i/s,
(1)
GI,c(s)=kI,p+kI,i/s.
(2)
式(1),(2)中:kV,p,kI,p为比例系数;kV,i,kI,i为积分系数;s为拉氏变换算子.
由图1可以得到逆变器等效控制框图,如图2所示.由此可计算出逆变器戴维南等效模型,逆变器的输出电压Vo为
Vo=Gc(s)Vref-Zo(s)Io
.
(3)
式(3)中:Zo(s)为逆变器的等效输出阻抗,与控制策略及参数相关;Gc(s)为逆变器的空载电压增益.
由式(3)可知:逆变器输出电压可通过两部分进行描述,第1部分描述输出电压跟踪给定参考电压的能力,即空载电压增益;第2部分描述输出电压应对负载扰动的性能.
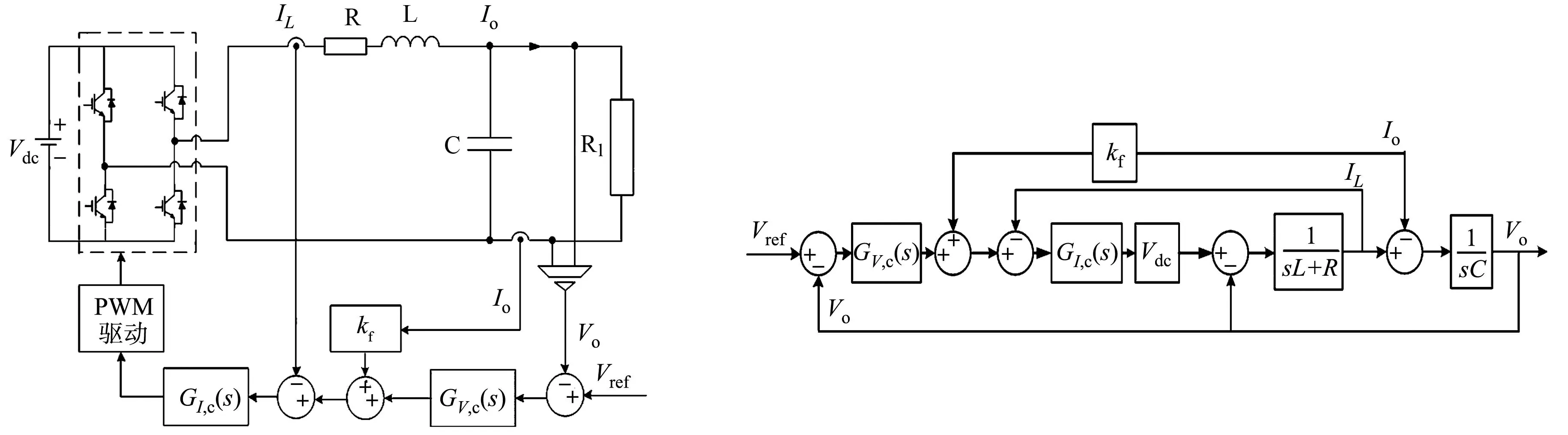
图1 逆变器控制框图 图2 逆变器等效控制框图Fig.1 Control block diagram of inverter Fig.2 Equivalent control block diagram of inverter
2 传统阻性下垂控制
根据戴维南等效模型可得两台逆变器并联运行的简化模型,如图3所示.图3中:Vn∠φn为逆变器n(此处n=1,2)的等效输出电压,φn为功率角;V0为负载电压;In为逆变器输出电流;Zn∠θn=Rn+jXn为逆变器的等效输出阻抗与线路阻抗之和,Xn为系统总电抗,Rn为系统总电阻,θn为系统阻抗角;Zload为负载阻抗.在低压微网中线路阻抗主要呈阻性,考虑阻抗角θn≈0°时,可得逆变器n输出的有功功率Pn和无功功率Qn[12]分别为
(4)
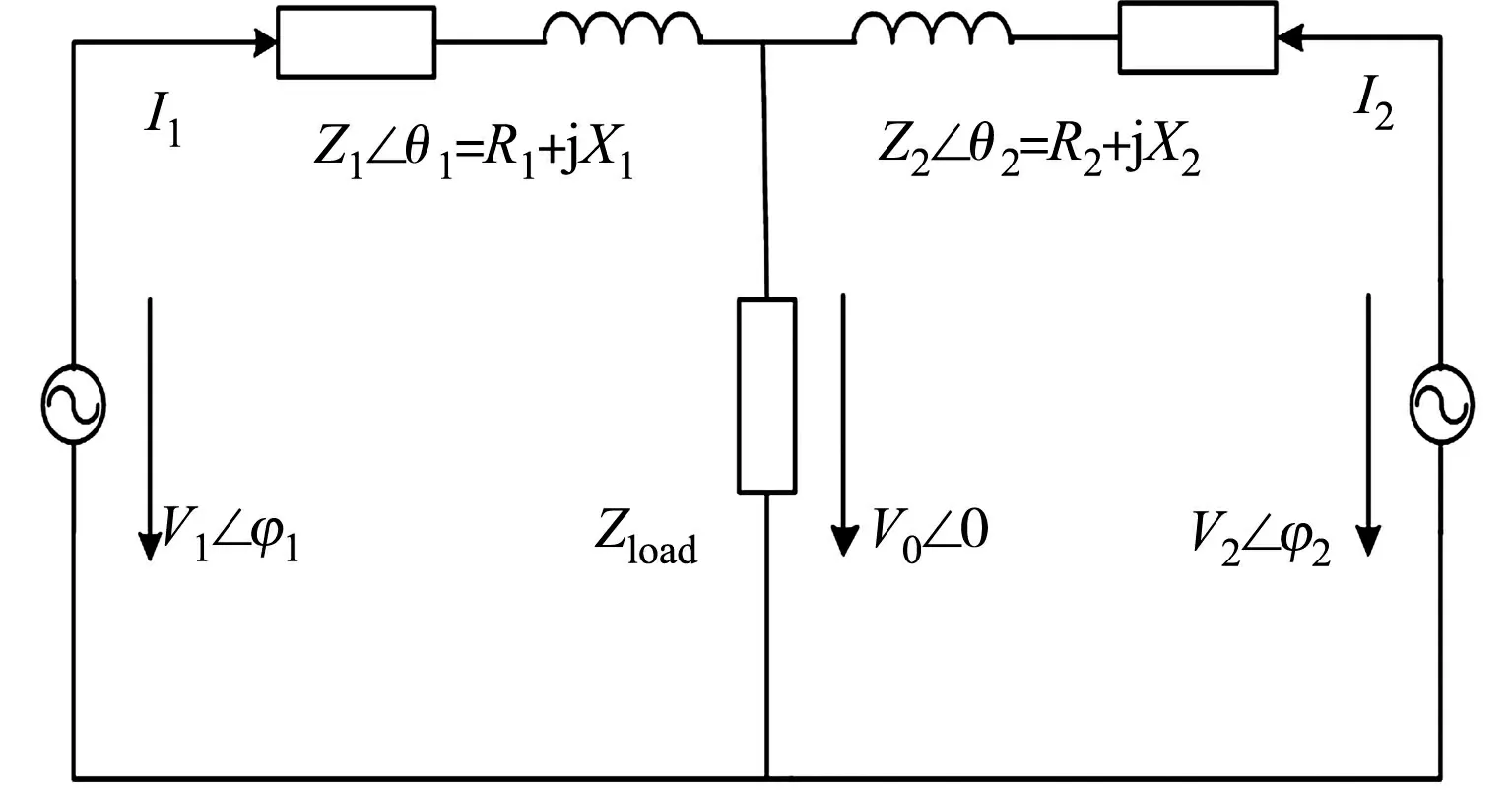
图3 并联逆变器等效电路模型Fig.3 Equivalent circuit model of parallel inverter
根据式(4),由于功率角φn很小,有sinφn≈φn,cosφn≈1,可推导得到传统阻性下垂控制方程,即
Vn=V*-kP,V,nPn,
(5)
ωn=ω*+kQ,ω,nQn.
(6)
式(5),(6)中:kP,V,n,kQ,ω,n分别为逆变器n的电压和角频率下垂系数;ω*为额定电压角频率;V*为额定电压幅值;ωn,Vn分别为逆变参考电压的角频率和幅值.
逆变器并联系统基于下垂控制运行时,各逆变器采集本地输出电压和输出电流,计算得到有功功率和无功功率,经过阻性下垂方程得到参考电压的幅值和角频率,进而生成参考电压送至电压控制器,生成开关器件的门级触发信号,控制开关管的通断.
传统下垂控制方法由于线路阻抗不等,造成功率分配不均和系统环流.目前,解决的主要方法之一是添加虚拟阻抗.对于虚拟阻抗值的设计,如果能通过通信获取逆变器功率参考值,则可以对虚拟阻抗进行精确调节,实现功率的精确分配.如果虚拟阻抗得以正确设计和实现,逆变单元的功率控制和分配性能可以得到极大的提高.
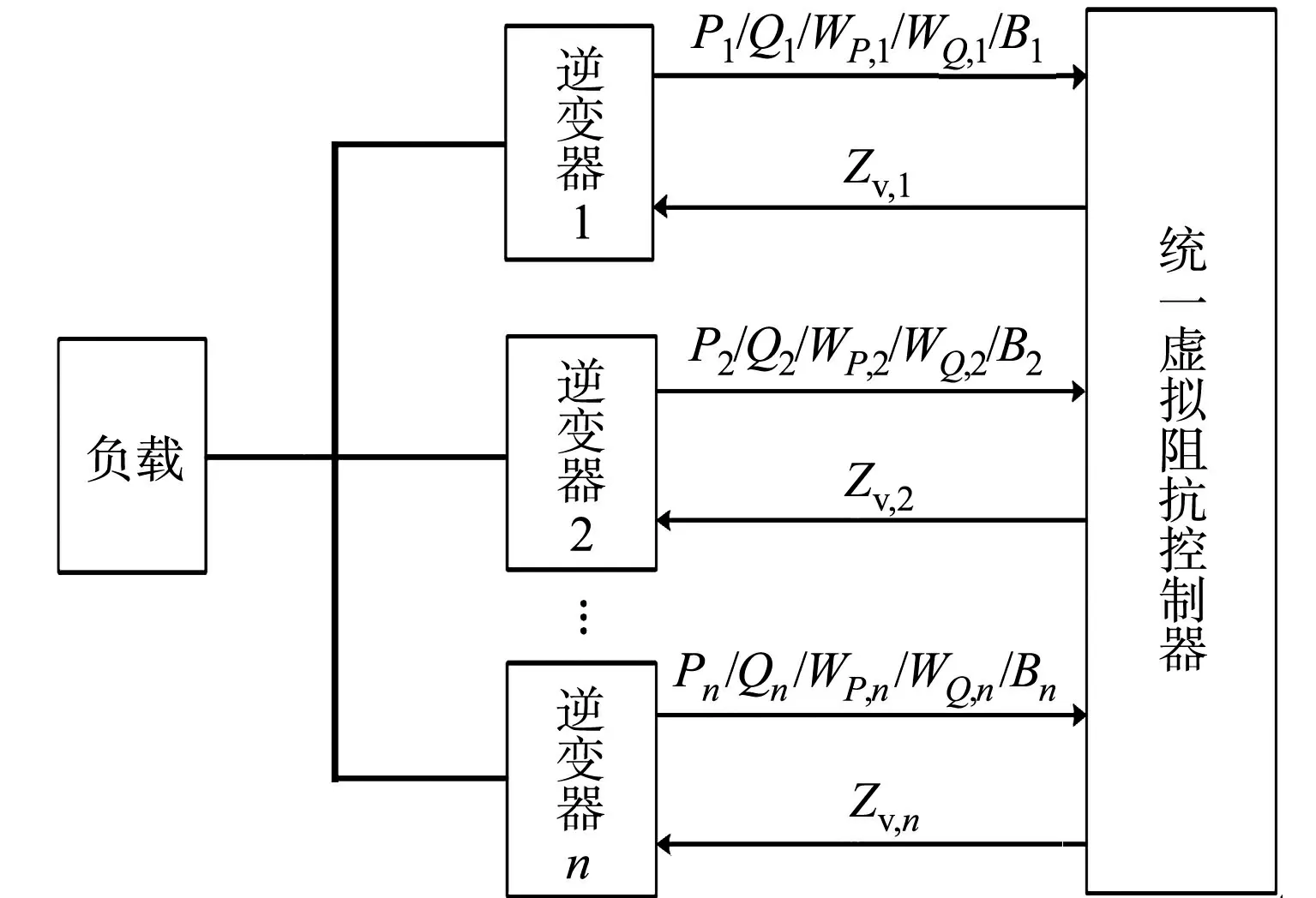
图4 统一虚拟阻抗控制框图Fig.4 Unified virtual impedance control block diagram
3 统一虚拟阻抗控制
目前,在已见报道的方案中,虚拟阻抗值大都是在各逆变器中独立进行整定[5-10,13-16],为简化各种工况下逆变器并联系统的虚拟阻抗控制逻辑,提高并联系统的功率分配性能,提出一种统一虚拟阻抗控制方案,其控制框图,如图4所示.图4中:WP,n,WQ,n分别为逆变器n的有功功率和无功功率的权重系数;Bn为逆变器n的并机状态位信号,当Bn=0时,表示未接入并联系统,当Bn=1时,表示已接入并联系统.各逆变器发送自身功率大小、功率权重系数及并机状态位信号给统一虚拟阻抗控制器,由其统一生成虚拟阻抗值,反馈给各逆变器,实现对所有逆变器的统一虚拟阻抗控制.通过引入基准逆变器,简化功率权重变化时各逆变器的下垂系数计算,在统一虚拟阻抗控制器中,计算各逆变器的功率参考值,生成所需添加的虚拟阻抗.
3.1 基准逆变器的引入

WP,n=PC,n/Pbase,WQ,n=QC,n/Qbase
.
(7)
式(7)中:PC,n,QC,n分别为逆变器n的有功功率和无功功率容量,在光伏和风力发电中,通常按最大有功功率进行输出.

(8)
当逆变器的权重系数发生变化时,下垂系数也需进行相应的调整(式(8)),逆变器的功率权重系数可接受上级能量管理中心的优化调度.
3.2 功率参考的生成

(9)
式(9)中:WP,j,WQ,j分别为逆变器j的有功权重系数和无功权重系数;Pj,Qj分别为逆变器j的有功功率和无功功率.
3.3 虚拟阻抗的生成
根据式(9),统一虚拟阻抗控制器生成各逆变器的功率参考,结合各逆变器的自身功率信息和并机状态位信号,可计算得到有功虚拟阻抗ZP,n和无功虚拟阻抗ZQ,n,即
(10)
(11)
式(10),(11)中:kio,P,kio,Q分别为有功和无功虚拟阻抗积分系数.

最终添加的虚拟阻抗Zv,n为
(12)
对逆变器而言,添加较大的虚拟阻抗有利于功率均分,但会引起较大的输出电压降落,需折中考虑,故对式(12)得到的虚拟阻抗值进行限幅(1.2 Ω)处理.统一虚拟阻抗控制器生成各逆变器所需的虚拟阻抗值并反馈给各逆变器,各逆变器通过乘以输出电流构造电压降落,实现虚拟阻抗的添加,即
(13)

3.4 通信问题的处理
各并联逆变器与统一虚拟阻抗控制器的通信更新周期为固定值,文中设置为10 ms.通信故障的处理逻辑如下:若统一虚拟阻抗控制器连续3个更新周期内均未收到逆变器的信息,即认为通信出现故障,此时,将该逆变器的并机状态位信号置0,并不再反馈虚拟阻抗;若并联系统中逆变器连续3个更新周期内均未收到统一虚拟阻抗控制器的信息,即认为通信出现故障,该逆变器将并机状态位信号置0,并主动退出并联系统.此外,由于通信更新周期远大于信号传输时间,且虚拟阻抗生成中的积分运算以通信更新周期为离散周期,因此,各逆变器与统一虚拟阻抗控制的通信时延及时延不一致问题不会影响文中方案的性能.
基于统一虚拟阻抗控制的逆变器并联系统控制框图,如图5所示.各逆变器虚拟阻抗值的整定均在统一虚拟阻抗控制器中完成,与逆变器所处的工况无关.各逆变器发送至统一虚拟阻抗控制器的功率权重信息和并机状态位信号仅需在数值发生变化时发送即可,其他情况下只需发送自身功率信息.
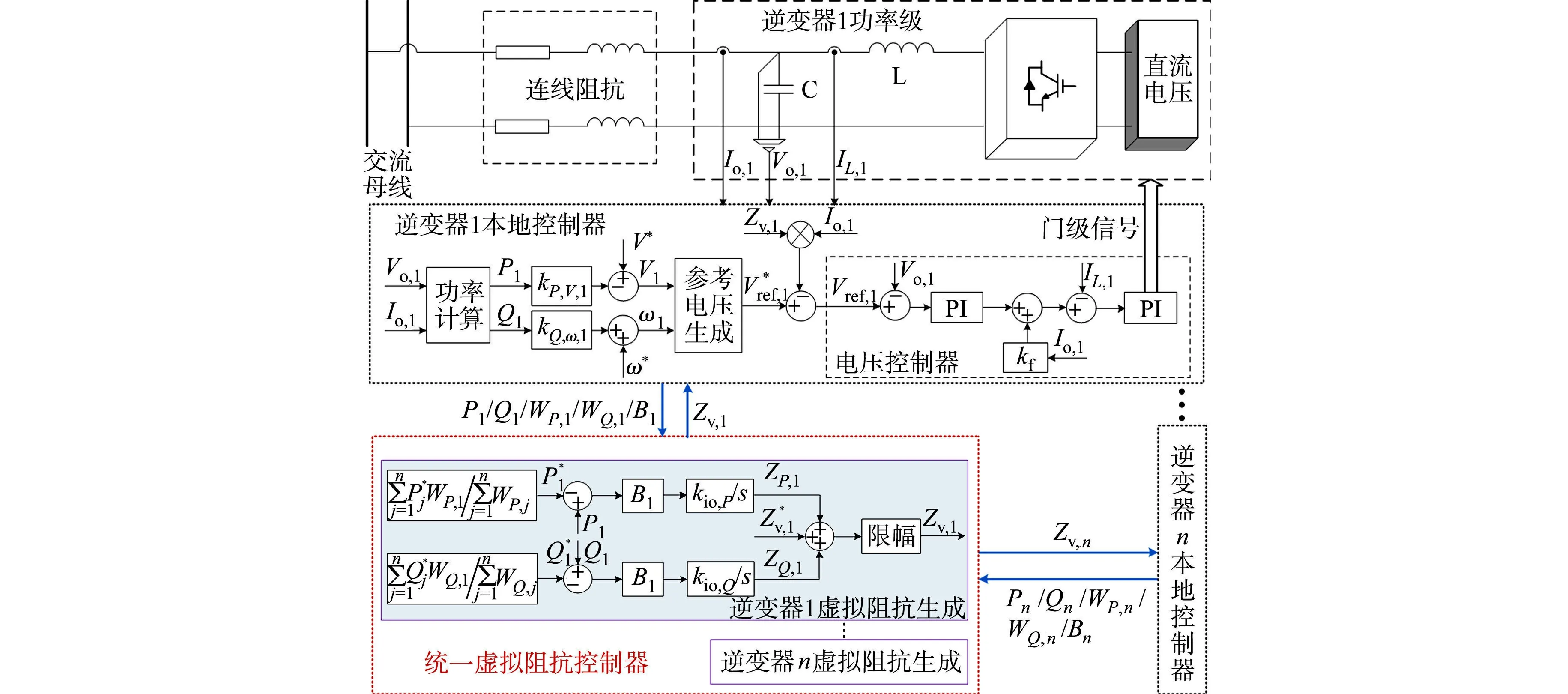
图5 基于统一虚拟阻抗控制的逆变器并联系统控制框图Fig.5 Control block diagram of inverter parallel system based unified virtual impedance control
4 仿真分析
在PLECS系统中搭建由两台逆变器构成的并联系统模型.逆变器电压控制器采用经典双闭环控制,同时引入输出电流前馈,通过极点配置法对PI控制参数进行整定,在单机运行时,输出电压降落较小,动态性能良好;并联系统采用阻性下垂控制及统一虚拟阻抗控制方案.仿真参数,如表1所示.表1中:f,fs分别为基波频率和开关频率;Zl,1,Zl,2分别为逆变器1,2的连线阻抗.
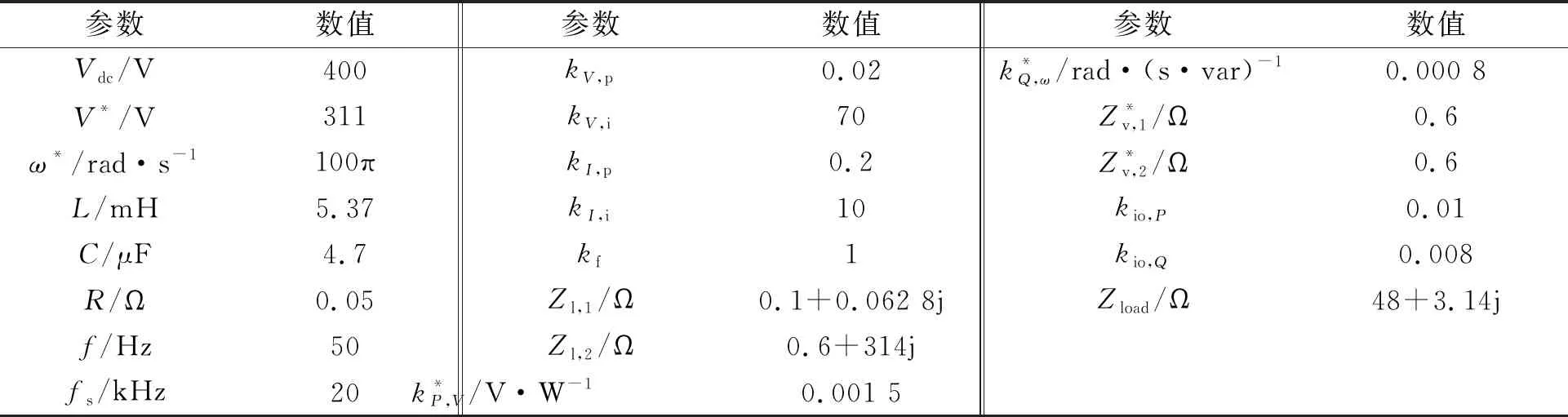
表1 仿真参数Tab.1 Simulation parameters
仿真过程分为3个阶段:1) 第1阶段.当t<0.5 s时,逆变器1独立运行;2) 第2阶段.当t=0.5 s
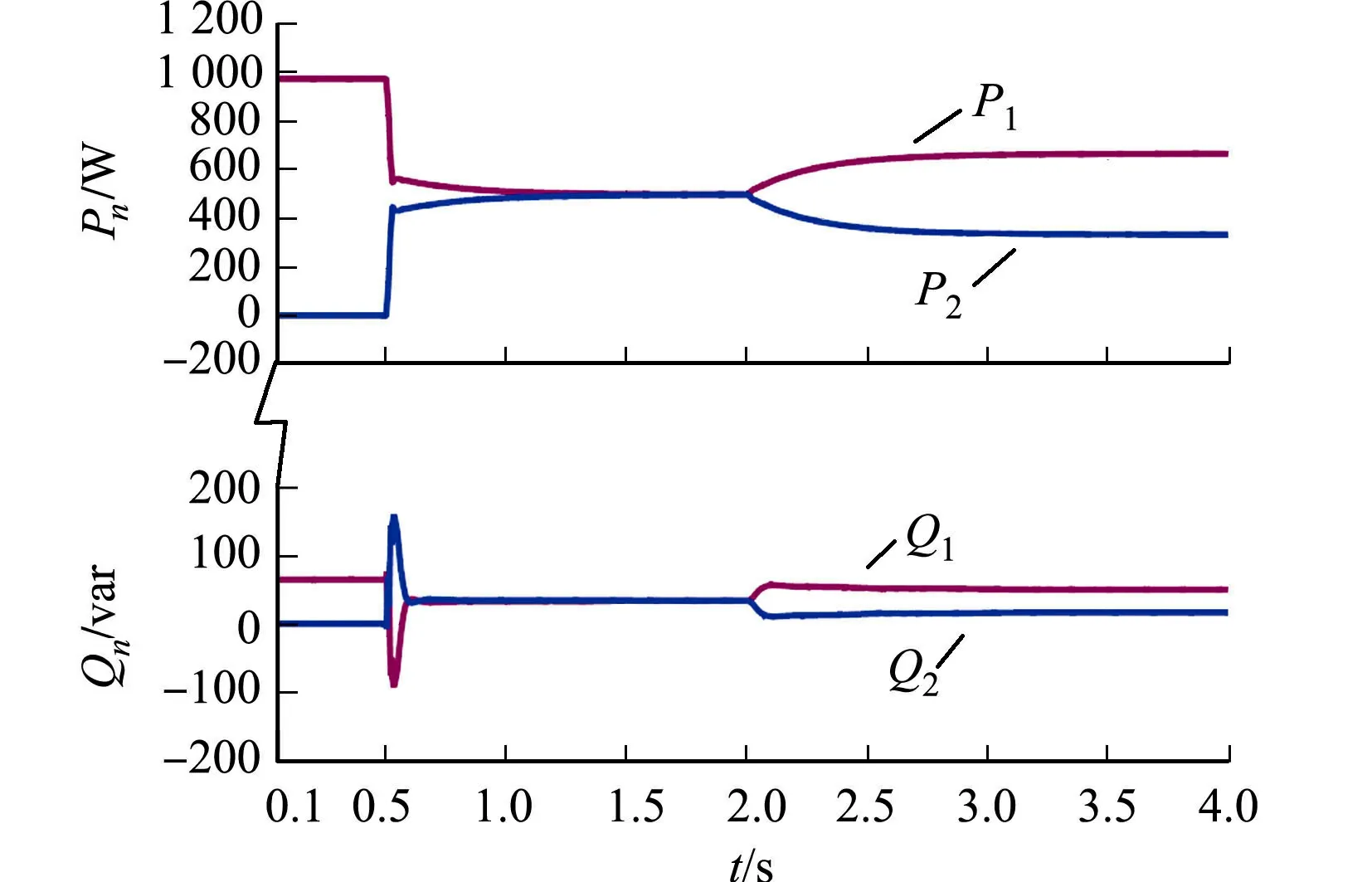
图6 两台逆变器输出的有功功率和无功功率波形Fig.6 Output active power and reactive power waveforms of two inverters
时,逆变器2投入系统,功率权重系数设置为WP,1=WP,2=1,WQ,1=WQ,2=1,即两台逆变器的有功功率和无功功率的分配比为1∶1;3) 第3阶段.当t=2.0 s时,WP,2=1,WQ,2=1,逆变器1的功率权重系数WP,1=2,WQ,1=3,此时,两台逆变器有功功率分配比为2∶1,无功功率分配比为3∶1.两台逆变器输出的有功功率和无功功率波形,如图6所示.功率权重变化前、后稳态输出电流波形(第2,3阶段),如图7所示.
在第1阶段,当仿真开始时,逆变器1独自承担负荷,逆变器2未投入并联系统.
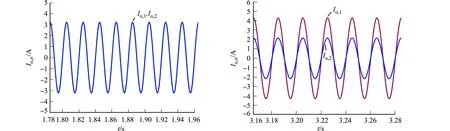
(a) 第2阶段 (b) 第3阶段 图7 功率权重变化前、后稳态输出电流波形(第2,3阶段)Fig.7 Steady-state output current waveforms before and after power weight change (second and third stages)
在第2阶段,当逆变器2投入并联系统后,在统一虚拟阻抗控制下,两台逆变器在稳态时输出的有功功率和无功功率实现精确均分,分别为496.2 W和34.0 var.当逆变器2投入系统时,无功功率存在一定的暂态过冲,表明虚拟阻抗未加入前系统的阻抗匹配程度较差.两台逆变器的稳态输出电流波形重叠(Io,1,Io,2重叠),均分性能良好(图7(a)).
在第3阶段,当t=2.0 s时,逆变器1的功率权重系数发生变化,两台逆变器承担的功率比例发生突变.在统一虚拟阻抗控制下,两台逆变器输出的有功功率和无功功率平滑过渡至新的分配比例.当稳态时,P1为664.4 W,P2为332.2 W,达到有功功率2∶1的分配要求;Q1为50.2 var,Q2为16.7 var,达到无功功率3∶1的分配要求.两台逆变器的稳态输出电流比值满足2∶1的关系(图7(b)).
基于统一虚拟阻抗控制方案,逆变器并联系统的虚拟阻抗控制逻辑简单、清晰,且适应逆变器的功率权重变化,能消除阻抗差异的影响,改善各逆变器的阻抗匹配,从而实现有功和无功功率的精确分配.
5 结束语
提出一种统一虚拟阻抗控制方案,对每台逆变器所需的虚拟阻抗值进行统一调节.文中方案能够适应线路阻抗差异,有效提高并联系统的稳态功率均分精度,并且在逆变器功率权重系数发生变化时,能够按权重系数比实现功率的灵活分配.各逆变器与统一虚拟阻抗控制器之间仅需通过低带宽通信完成信息交互.仿真结果表明:文中方案能够实现输出功率的灵活分配控制.