机械式手臂动作姿态捕捉系统的设计
2021-02-01郭继东白翔宇陈德凰温承超
郭继东,白翔宇,陈德凰,温承超,李 盛
(北京理工大学珠海学院,广东 珠海 519088)
1.引言
为方便给超市仓储、采矿、建筑生产、抢险救灾等情景进行外骨骼机器人手部动作的姿态控制,需要对动作捕捉控制提供实时的操作系统,使得机器人在活动中精准高效,同时降低活动带来的风险危害,本文对此进行了设计探讨。
动作捕捉的本质是能够测量、跟踪并记录物体在三维立体空间中的运动路线轨迹。比较典型的动作捕捉设备通常由三部分组成,分别是传感器、信号捕捉设备及数据传输设备。
机械式动作捕捉拥有成本低、实时测量的优势。系统中包含连杆和关节两个部分,在关节处安置角度测量设备,用于测量关节的转动角度。当被测物体运动时,由于连杆的作用,角度测量设备会测出相应的角度值,进而得出被测物体的姿态与运动信息,但是灵活性极差。随着传感器的快速发展其缺点也将逐渐减小,体积小,易携带,实时测量的优点也逐渐体现。将机械动作捕捉与机械手结合使用时,将会为超市仓储、采矿、房地产建筑一线、抢险救灾一线等情景活动中更加精准高效的提高效率,同时降低活动带来的风险危害,可以增强工人的工作能力。与传统的遥控方式相比,这种系统可以实现更为直观、细致、复杂、灵活而快速的动作控制,大大提高机器人应付复杂情况的能力。可以改善在手遥控过程中存在的动作不精准的缺陷。随着软硬技术迅速发展,基于STM32的低价,低功耗,具有强大的算力和丰富的拓展接口,可以很好的同时处理手部传感器和陀螺仪并传输手部动作和位置信息。
2.手部动作姿态捕捉系统方案
2.1 工作流程

图1 工作流程图
2.2 手指动作捕捉
机械式手部动作姿态捕捉,常见的是采用连杆和关节两个部分,在关节处安置角度测量设备,对关节的转动角度进行测量,手指关节较多,每一个传感器都需要连杆机构,造成测量装置测量不灵活。于是选择角度弯曲传感器检测手指的弯曲程度,flex柔性传感器基本上是一个对弯曲起反应的可变电阻器。当弯曲180°时,它的测量值约为22KΩ,至40KΩ。弯曲只能在一个方向上检测到,并且读数会不稳定,所以获得检测到至少10°以上才能获得最佳的结果,实物模型见图2。
这种传感器在测试手指的弯曲程度中,其优势为,占用接口数量少,体积小;但是使用中也有部分问题。
(1)传感器并不能完全贴合手指,并不能准确的测量手指的弯曲程度。
(2)弯曲程度有限,不能达到90°。
(3)经过一段时间使用后会有形变且无法恢复,对测量值有影响。
(4)只能测量手指弯曲程度,两手指间角度无法测量,还需另加传感器。
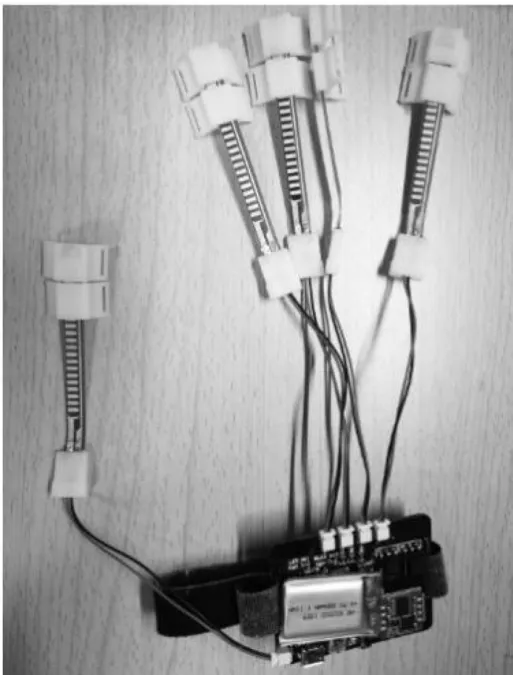
图2 Flex柔性传感器

图3 手部捕捉模型
2.3 手部姿态捕捉
手在空间的运动及位置用机械式捕捉难以实现,于是选用了mpu6050模块捕捉手部的姿态。MPU-60X0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。将其放置于测量装置中,就可以通过陀螺仪传感器得到待测得手部的x,y,z轴的倾角,从而获得手部所处姿态,获取数据后通过无线传输模块对数据进行传输,见图3。
2.4 无线模块技术要求及选择
动作被相应传感器捕捉到后需要向上机位或下机位传输数据,所以需要一种传输稳定,易于开发,价格低廉的传输模块。
HC05蓝牙模块具有两种通讯模式:而在自动连接工作模式下,可以充当三种角色,分别是从角色、主角色和回环角色,将会通过设定好的方式连接进行数据传输。作为一款主从一体的蓝牙转串口的设备,可以忽略蓝牙连接协议只需了解串口编程,进行连接的建立。系统模型见图4。
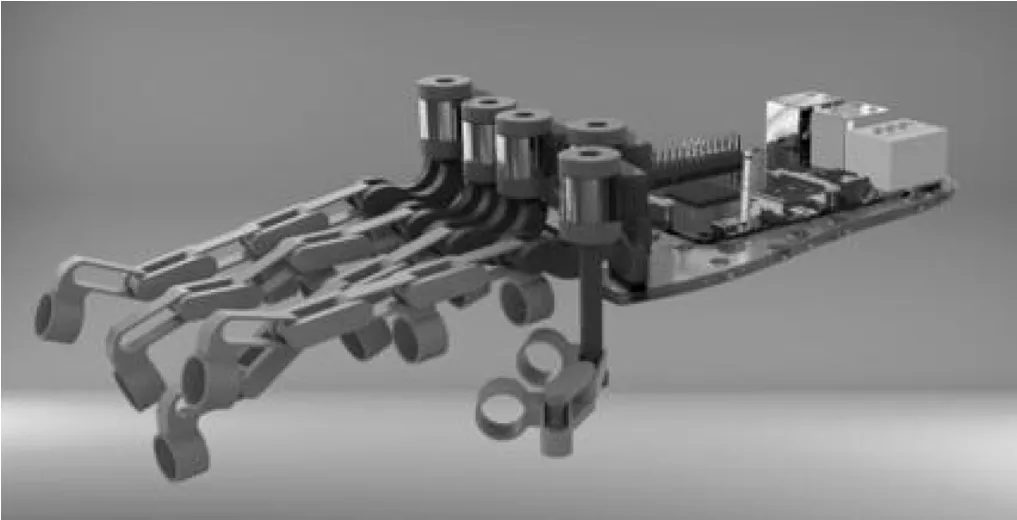
图4 机械手控制系统模型
3.机械手捕捉系统在汽车行业的应用
本设计的操控系统可适用于对机械制造行业特别是汽车、重型装备等在高温、高热、强辐射等复杂环境下的应用。在汽车安装总线上,车身的搬运、焊接、装配、包装及检测等都需要应用机械手,机械手已成为汽车生产线上非常重要的一个组成部分。在安装作业中机械手的应用更是随处可见,如车灯、车门、座椅、轮胎等的安装。以轮胎装配机械手来举例,作为装配轮胎时工人使用的辅助装置,能准确地实现某些特定工位轮胎的搬运安装作业,结构刚性好,工作平稳可靠,可以实现机械自锁,大幅度地降低了劳动成本,提高了安全性和工作效率,已经被广泛地应用相关生产。对于焊接作业、板材冲压、喷漆作业等,要发展有能实时感受的机械手,不仅要有成熟的位置、速度等传感器,还需应用机器视觉和触觉等技术发展高精度传感器。机械手能够反馈外界环境的变化,并作出相应的反应。
本系统通过传感器对操作者手臂的姿态角度进行测量,对其手掌的抓握动作进行检测,然后将测量结果数据传送到机械臂驱动部分,再通过舵机最终实现机械臂对操作者手臂动作的模仿。通过此系统可以对机械产品的试制生产或装配车间进行工艺操作模拟实验,以提高机械手臂动作模拟的准确性和可靠性。
4.结语
本系统采用了STM32+flex柔性传感器+mpu6050+hc05无线蓝牙模块组成了手部动作姿态传感器。它基于STM32高性能,低成本,低功耗的嵌入式系统平台;使用flex柔性传感器来捕捉手指的动作;mpu6050传感器来捕捉手部的姿态;最终通过hc05蓝牙模块对上机位进行数据反馈,方便操作者对于数据的读取,达到了预期的效果。下一步可选择高精度传感器,使其能更加准确地测量手指关节的角度。机械式动作捕捉位置精准但是无法反映出操作者的力度,在操作者小臂等部位增加肌肉电传感器,当操作者用力时肌肉电会被传感器捕捉到,数据进行采集发送给控制器,进而实现对操作者的手部信息精准且全面的采集及反馈。机械式手臂动作捕捉技术有着对环境的高适应性,它的技术特点和使用便捷的优势,使得它在各行业如机械制造生产、工业测量和设计、医疗康复、体育训练、真人模拟演练、影视动画、虚拟演播室等领域,有着广泛的应用推广前景。
