自动驾驶障碍车辆行为预测技术研究
2021-02-01李宇寂
李宇寂
(1.中国第一汽车股份有限公司 智能网联开发院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:自动驾驶 障碍车辆 行为预测 隐马尔可夫模型
1 引言
在复杂的交通环境中,车辆要想安全快速行驶,不只是要规划好自身的路径,更要根据周围车辆的实时变化,动态的规划接下来的驾驶动作,正是由于存在自身车辆与周围障碍车辆的交互影响,如何准确的预测周围障碍车辆的驾驶行为变得尤其重要。有经验的驾驶员会根据周围车辆的一系列动作准确预测出其接下来的行为,比如直行、左换道、右换道、左转弯和右转弯等等。自动驾驶应用中,无人车也需要根据周围车辆的驾驶行为来准确规划自身车辆接下来的动作,无人车配有各类传感器,比如视觉摄像头、毫米波雷达和激光雷达等,这使得它们具备远超人类的检测感知能力,并且可以做到不间断,全方位地检测周围环境,进而通过对障碍车辆信息数据的收集和处理,来判断其接下来的行驶意图,最终用于自身车辆行为决策和轨迹规划的依据。蔡英凤[1]运用隐马尔科夫模型,对带有时间和空间信息的车辆轨迹进行训练,获得路径划分后对道路车辆轨迹进行参数匹配,提取诸如超低(高)速行驶、违章停车、违规掉头等异常行为。黄如林[2]利用高斯混合模型从车辆驾驶行为数据和道路结构信息中学习驾驶行为模式,并用于检测动态车辆的驾驶行为意图。耿新力[3]提出了一种基于本体论和马尔科夫理论的行为决策方法,对其中的驾驶场景建模、他车运动状态预测和驾驶动作生成方法进行了深入研究。
本文通过车辆周围传感器来感知障碍车辆的相对位置信息,并结合自身车辆的高精定位信息,获得障碍车辆的精确位置,通过应用隐马尔可夫模型建立不同驾驶行为的预测模型,最终通过模型的预测来判断障碍车辆的可能驾驶意图,辅助自动驾驶车辆进行有效的驾驶决策,更好的规划安全高效的行驶路线。
2 行为预测模块整体架构
有经验的驾驶员可以通过观察周围车辆的一系列轨迹来预估其未来的驾驶动作。而无人驾驶车辆通过车身周围布置的各种传感器来感知障碍车辆的相对位置关系,同时通过GPS 和惯性测量单元(Inertial Measurement Unit,IMU)获得自身车辆的定位信息,再经过复杂的处理和精确的判断后,也能够预测障碍车辆的驾驶动作。整个过程的结构图如图1所示。

图1 行为预测模块架构
3 场景划分和提取
在不同场景下,车辆会有不同可能的驾驶意图。比如在高速场景下,可行的驾驶意图通常分为3种:直行、左变道和右变道(图2)。而在十字路口,可行的驾驶意图除了以上列举的3种,还包括左转弯、右转弯和直行通过路口(图3)。所以,需要设计1种方法,使其能够适用于不同场景的意图预测。不仅如此,针对不同的交通场景进行预测一方面能够使预测过程有更好的针对性,另一方面还能够简化预测过程,消除不必要的误识别,比如在高速场景,障碍车辆不可能左右转弯,因此输出的预测结果就不需要考虑左右转弯,从而大大减少程序的计算复杂度,并消除误识别。
根据导航可以获得自身车辆当前所处的场景信息,比如高速场景,还是城市道路场景,进一步可以将场景细化:高速场景分为普通道路场景和上下高速匝道场景;城市道路场景可以分为普通道路场景和路口场景(十字路口,丁字路口等)。当车辆运行到实际工况时,可以根据具体细分场景将车辆可能的驾驶行为更详细的确定,比如在高速公路上匝道场景,车辆只可能直行和左变道;下匝道场景,车辆只可能直行和右变道;对普通道路的路口场景,比如非十字路口(如丁字路口或禁止左转路口),车辆可能的行驶方向只有直行和右转弯。

图2 高速场景

图3 城市场景
4 行为决策处理过程
4.1 障碍车辆的绝对定位
自动驾驶车辆根据各传感器的检测,分别获得周围障碍车辆的位置信息,进一步经过感知融合模块获得更鲁棒和精确的位置信息,最终得到障碍车辆与自身车辆的相对位置关系,再结合自身车辆的高精定位信息,可以确定障碍车辆的高精定位信息,最终获得障碍车辆的绝对位置。
图4给出了车辆相对位置关系示例图。基于自身车辆的定位信息,结合所述障碍车辆的相对位置信息,确定障碍车辆的准确位置的方法包括:自身车辆通过高精定位信息可以获得车辆在世界坐标系下的绝对位置( Xω,Yω)和航向角( β ),通过传感器可以获得目标车辆在本车车辆坐标系下的相对位置( Xv,Yv),最终的目标车辆在世界坐标系下的绝对坐标( Xf,Yf)可以通过如下公式获得:


图4 车辆相对位置关系示例
4.2 障碍车辆的轨迹序列
为了确定车辆未来的驾驶意图,需要结合其一段时期的驾驶动作,因此需要记录障碍车辆的历史轨迹序列(图5)。

图5 障碍车辆的历史轨迹
图5 给出了一种车辆运动轨迹示意图。车辆的行驶在时间序列上是有延续性的,既通常情况下车辆会沿着既定的驾驶意图行驶,短期内不会处于杂乱无章的运动,因此当前时刻识别出车辆在一段历史时期的驾驶动作,即可预测车辆在未来一段时间内的驾驶意图。
4.3 应用统计学的方法来描述障碍车辆驾驶动作
车辆在不同的驾驶意图下,会生成不同的历史轨迹序列,可以通过对历史轨迹的判断来间接判断车辆接下来可能的驾驶动作,比如车辆在一段时间一直沿直线行驶,那么接下来继续直行的概率会非常大,如果车辆在一段时间有向右移动的趋势,那么其接下来右转弯的概率非常大,并不一定需要车辆完全转过来才确认。不同的驾驶员对车辆的操控会有很大的不同,即使都是直行,有经验的驾驶员会开的比较平稳顺滑,新的驾驶员会不断的小幅修正方向盘,车辆的轨迹就会有小幅度的左右晃动;另一方面,不同的驾驶员转弯的半径也会千差万别。为了能够消除由于不同的驾驶习惯导致的驾驶意图判断不准,这里引入HMM(隐马尔可夫模型)来进行统计化处理。
HMM 是一种用来描述随机状态序列的概率模型,通过HMM得到的是一个状态序列发生的概率,这里通过对车辆在一段时间内的历史轨迹序列,判断其可能的驾驶动作发生的概率。应用统计学的处理方法,可以将不同的驾驶习惯更好的进行归类,从而消除不同驾驶员的个体差异,比如可以将不同转弯半径的驾驶习惯都判断为左转弯或者右转弯,从而使驾驶行为的预测有更好的泛化性和鲁棒性。
应用HMM模型来对不同驾驶动作进行统计学分析处理,需要首先获得不同驾驶动作的特征向量,进而通过离线的模型训练来获得不同驾驶动作对应的HMM模型以及阈值模型。实际车辆行驶过程中通过将障碍车辆一段时间产生的轨迹序列量化为特征向量,输入到训练好的模型当中,并通过设计好的算法判断后,即可得到最终驾驶动作的判断结果。
车辆的行驶在时间序列上是有延续性的,既通常情况下车辆会沿着既定的驾驶意图行驶,短期内不会处于杂乱无章的运动,因此当前时刻识别出车辆在一段历史时期的驾驶动作,即可预测车辆在未来一段时间内的驾驶意图。应用HMM模型进行统计学的判断方法,由于其计算不同可能驾驶动作的概率,因此不需要车辆完全执行完动作,即可判断其驾驶意图,如车辆在转弯的初期即可通过模型判断出未来转弯的概率远远大于继续直行的概率。
4.4 HMM模型的设计
设计HMM 模型λ=( )A,B,π 为经典的左右结构,如图6 所示。具体参数如下:状态集数目为N(设定为3),观测集数目M(设定为16),状态转移矩阵A 为N·N 的矩阵,输出概率分布矩阵B 为N·M 的矩阵,初始化向量π为1·N 的向量(根据不同需要可以进行调整)。为车辆不同的驾驶行为设计5 类不同的HMM模型,另外再设计一个阈值模型。其中5 类模型分别为:直行模型、左变道模型、右变道模型、左转弯模型和右转弯模型。阈值模型用于区分5 类驾驶动作和随机动作(某些不规则随机驾驶动作可能引起误识别)。
观测值由车辆在一定时间间隔下的行驶方向产生,通过量化的编码最终形成观测值。车辆在一段时间内从当前时刻位置到前一时刻位置形成一个如图7所示的方向向量,根据如图8和图9的编码规则,可以将方向向量量化为1~16的编码。车辆行驶一段时间后会形成一系列的方向编码,从而组成如图10所示的方向特征向量。不同的驾驶动作会形成不同的车辆行驶轨迹,经过量化编码后会形成不同的方向特征向量,通过对方向特征向量的区分就可以最终得到驾驶动作的区分。
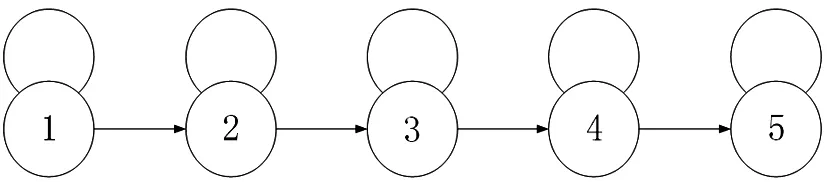
图6 HMM模型

图7 方向向量
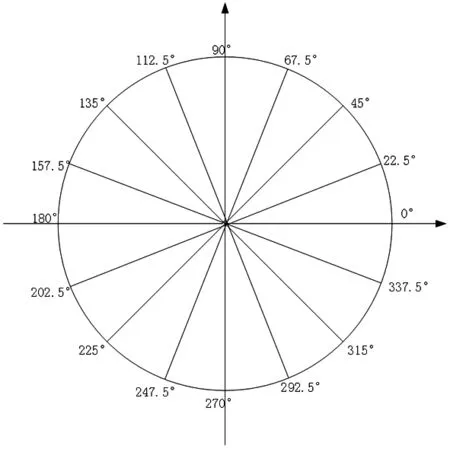
图8 角度划分规则图

图9 向量编码规则图
4.5 HMM模型的训练
将不同的驾驶动作形成的方向向量进行采集和编码,形成不同驾驶动作的训练集,通过HMM模型训练后,形成5 类驾驶动作的HMM 模型(直行HMM 模型、左变道HMM 模型、右变道HMM 模型、左转弯HMM模型和右转弯HMM模型)。本文设计了一个阈值模型用于区分5类驾驶动作和随机不规则的动作。

图10 直行方向特征向量示例
训练阶段的具体过程为:将训练集中的每一个动作序列形成对应的方向特征向量,通过HMM 的B-W算法进行训练得到对应的模型,将所有模型进行平均后得到最终此类动作对应的HMM模型(如直行HMM模型)。阈值模型通过结合5类驾驶动作模型的共同信息而生成。单一驾驶动作的HMM模型训练过程如图11所示,阈值模型的生成过程如图12所示。

图11 单一驾驶动作的HMM模型训练

图12 阈值模型的生成
4.6 HMM模型的识别
识别阶段的具体过程为:通过读取传感器对障碍车辆的定位信息,一段时间间隔内生成该车辆的轨迹序列,进一步生成观测值方向特征向量,带入各个驾驶动作HMM 模型和阈值模型后,选取最大的前向概率对应的动作模型,并与阈值模型进行比较,最终确认驾驶动作是否符合5类驾驶动作之一或者是不规则的随机动作。识别流程图如图13所示。
4.7 障碍车辆驾驶行为预测的输出
车辆的行驶在时间序列上是有延续性的,既通常情况下车辆会沿着既定的驾驶意图行驶,短期内不会处于杂乱无章的运动,因此当前时刻识别出车辆在一段历史时期的驾驶动作,即可预测车辆在未来一段时间内的驾驶意图。应用HMM模型进行统计学的判断方法,由于其计算不同可能驾驶动作的概率,因此不需要车辆完全执行完动作,即可判断其驾驶意图,如车辆在转弯的初期即可通过模型判断出未来转弯的概率远远大于继续直行的概率。
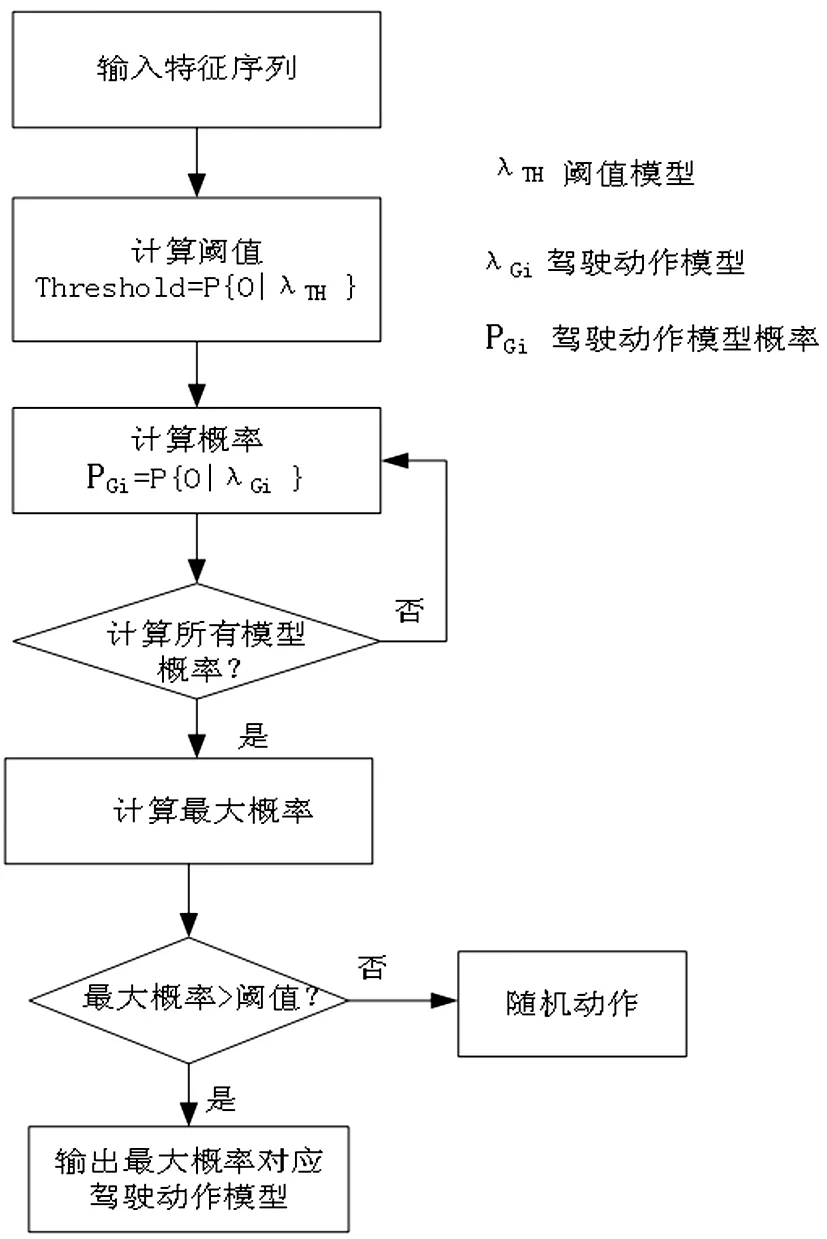
图13 HMM模型的识别流程
5 结论及启示
本文提出的障碍物行为预测系统,可以有效识别大部分城市道路场景下车辆的行驶意图,为高级别自动驾驶系统提供行为决策和路径规划的依据,但由于交通环境的复杂性,在某些极端情况下,障碍车辆的行为可能会没有常规的规律可循,因此用统计学的方法来进行预测不会特别准确,这就需要研究更复杂、适应性更强的技术来处理,这也是自动驾驶领域车辆行为预测的未来发展方向。