基于改进CREAM扩展法的驾驶转向人因失误率预测
2021-01-27郭进利郭曌华
李 娜,郭进利,郭曌华
(1.上海理工大学 管理学院,上海 200093;2.上海理工大学 机械工程学院,上海 200093)
随着我国居民生活水平的提高和交通网络的大力发展,汽车出行在交通方式中所占比重迅速增加[1]。汽车技术发展迅速,车辆设备的可靠性已经得到极大的提升,而由于人的失误造成的交通事故量占比越来越重。Rumar[2]曾在研究中指出,大约90%~95%的交通事故都是由人的因素造成的。因此,研究车辆驾驶人在驾驶任务中的人因失误行为有着重大的现实意义。
具有交通信号灯控制的交叉口作为城市路网的关键节点,其交通通行特征复杂,是交通事故的常发点[3]。驾驶车辆在这样的路口进行转向任务是驾驶人经常遇到的情况,由于环境以及自身因素的影响,可能会出现一些驾驶差错行为,严重的甚至会引发重大的交通事故。因此,对驾驶人操作的可靠性进行评估和量化分析显得尤为重要。
1 人因可靠性分析方法
第一代人因可靠性分析(human factor reliability analysis, HRA)方法主要有人因失误率预测技术(technique for human error rate prediction, THERP)、人因失误评估与减少技术(human error assessment and reduction technique, HEART)、人的认知可靠性(human cognitive reliability, HCR)及成功似然指数法−多属性效应分解(success likelihood index methodmulti attribute utility decomposition, SLIM-MAUD)等,但是,第一代的很多方法缺乏心理学基础,没有考虑到深层次的人的认知行为[4]。认知可靠性与失误分析方法(cognitive reliability and error analysis method, CREAM)[5]是HRA第二代的代表性方法,其核心思想是人的绩效输出不是孤立的随机行为,而是依赖于完成任务时所处的情景或工作条件[6]。CREAM可以进行回溯分析和预测分析,最初的分析对象是核电领域,但它是一种通用型方法,可以在很多包含复杂、动态系统的领域中应用。杨越等[7]提出了基于CREAM和贝叶斯网络的人因失误预测方法,并将其应用在航空领域的空管人误概率预测中。浦同争等[8]依据无人机操作员的任务特征建立了影响操作员绩效的行为行成因子,改进了CREAM方法,分析了无人机操作员的人因可靠性。王宁等[9]构建了加权模糊CREAM模型,对地铁盾构施工人员的人因可靠性进行了分析。吴雅菊等[10]研究了高温熔融金属作业人员的可靠性,利用CREAM方法对作业人员的可靠性进行了量化和评估。Pan等[11]在CREAM方法的基础上,提出了分析和预测人因失误的策略,并将其应用在航天领域。刘继新等[12]利用CREAM扩展法评估管制人员在空中交通指挥过程中的可靠性,量化了管制人员在特定任务中的人因失误概率。席永涛等[13]以CREAM方法为基础,采用特征选择算法、贝叶斯网络和证据推理算法对多源数据进行处理,构建了一个改进的CREAM模型,并用此模型对特定场景下船舶驾驶员操作可靠性进行量化预测。尚梅等[14]将CREAM方法应用在建筑领域,对建筑工人人因失误率进行定量预测。
CREAM扩展法是通过共同绩效条件(common performance conditions, CPC)来量化任务特点和情景环境的,因此,CPC因子权重的确定关系到整个预测结果的准确性[15]。CREAM方法在评估人因可靠性的时候,默认所有的CPC因子都具有同等的重要性,但实际情况往往并非如此,在实际的情境中,影响人可靠性的各种因素的重要程度是不同的,并且某些因素之间会相互影响。多数对于CREAM方法的研究中,没有考虑CPC因子的自身权重以及某些CPC因子之间的相互影响关系。另外,以往的研究多将CREAM方法应用在航空航天、航海等领域,而对于交通驾驶领域的应用极其少见。且对于驾驶人的人因可靠性分析多采用定性分析的方式,没有系统的定量分析方法。本文以CREAM扩展法为基础,利用系统因素分析方法−决策与实验室方法(decision-making trial and evaluation laboratory, DEMATEL)[16]综合考虑CPC因子之间的影响关系,计算得到CPC因子的影响权重。进而对CREAM方法中总权重因子计算公式进行改进,并对驾驶人驾驶车辆在具有交通信号灯控制的交叉口进行转向这一普遍任务中的人因失误进行定量化分析与预测。
2 改进CREAM扩展法定量化预测驾驶人人因失误率
2.1 特定场景下驾驶转向任务事件序列分析
在一般的具有交通信号灯控制的十字交叉路口,驾驶人驾驶车辆进行转向任务,需要完成一系列的驾驶操作。驾驶人在驾驶车辆转向时大致可分为3个阶段,其关键事件序列如图1所示。
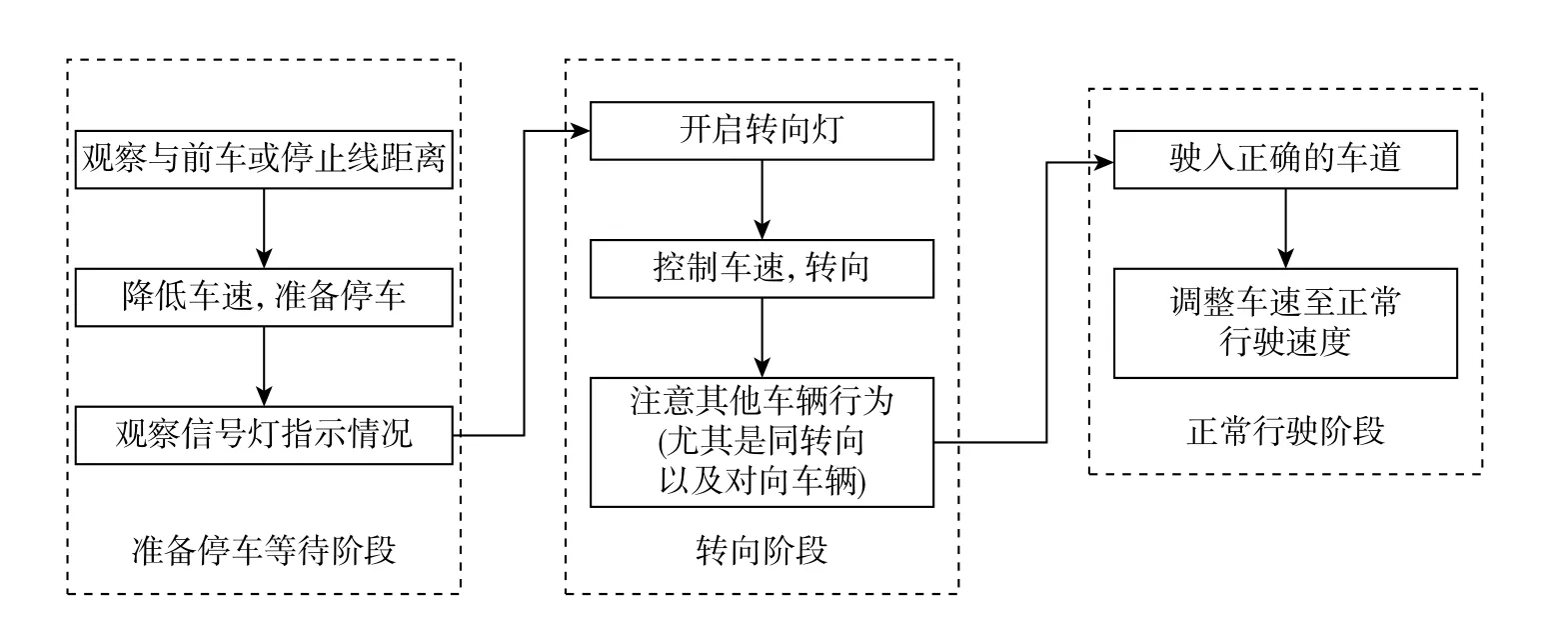
图1 车辆驾驶转向任务关键事件序列图Fig.1 Sequence diagram of critical events in the steering task of a vehicle
2.2 识别认知行为和认知功能
建立关键事件序列之后,要对其认知行为进行分析。CREAM将认知行为类型分为15种,包括协调、通信、比较、诊断、评估、执行、识别、保持、监视、观察、计划、记录、调整、扫视和检验。认知功能分为4类,包括观察、解释、计划和执行。每一类功能有若干个失效模式[5]。通过对驾驶转向关键事件序列分析,确定每一项任务中涉及到的认知活动以及对应的认知功能,如表1所示。
2.3 评估CPC因子
2.3.1 确定CPC因子水平及对绩效预计的影响
CREAM方法是在对大量的安全事故研究的基础上提出的,它提供了影响人因绩效的9种CPC因子,并说明了CPC因子不同水平对绩效可靠性的影响以及对应的认知功能的权重因子。CREAM方法应用到驾驶领域中时,可进行适当改变,使之更加适合于驾驶领域,文献[17]认为人的内因和环境的外因共同决定人的行为。驾驶任务中,驾驶人自身因素和环境因素都会对驾驶人可靠性绩效产生影响,结合实际的驾驶情景,确定9种影响驾驶转向任务中人因失误的CPC因子:交通流量(CPC1)、行驶道路路况(CPC2)、其他车辆行为(CPC3)、人机界面的支持程度(CPC4)、内部驾驶环境(CPC5)、道路熟悉程度(CPC6)、驾驶时间段(CPC7)、驾驶人生/心理状态(CPC8)、驾驶人技能和经验(CPC9)。各个CPC因子的说明如表2所示。CPC不同水平对应的认知功能权重因子如表3所示。由于本文讨论的是一般情况下转向任务中驾驶人的普遍认知过程,故假设CPC因子水平处于较优水平,如表4所示。
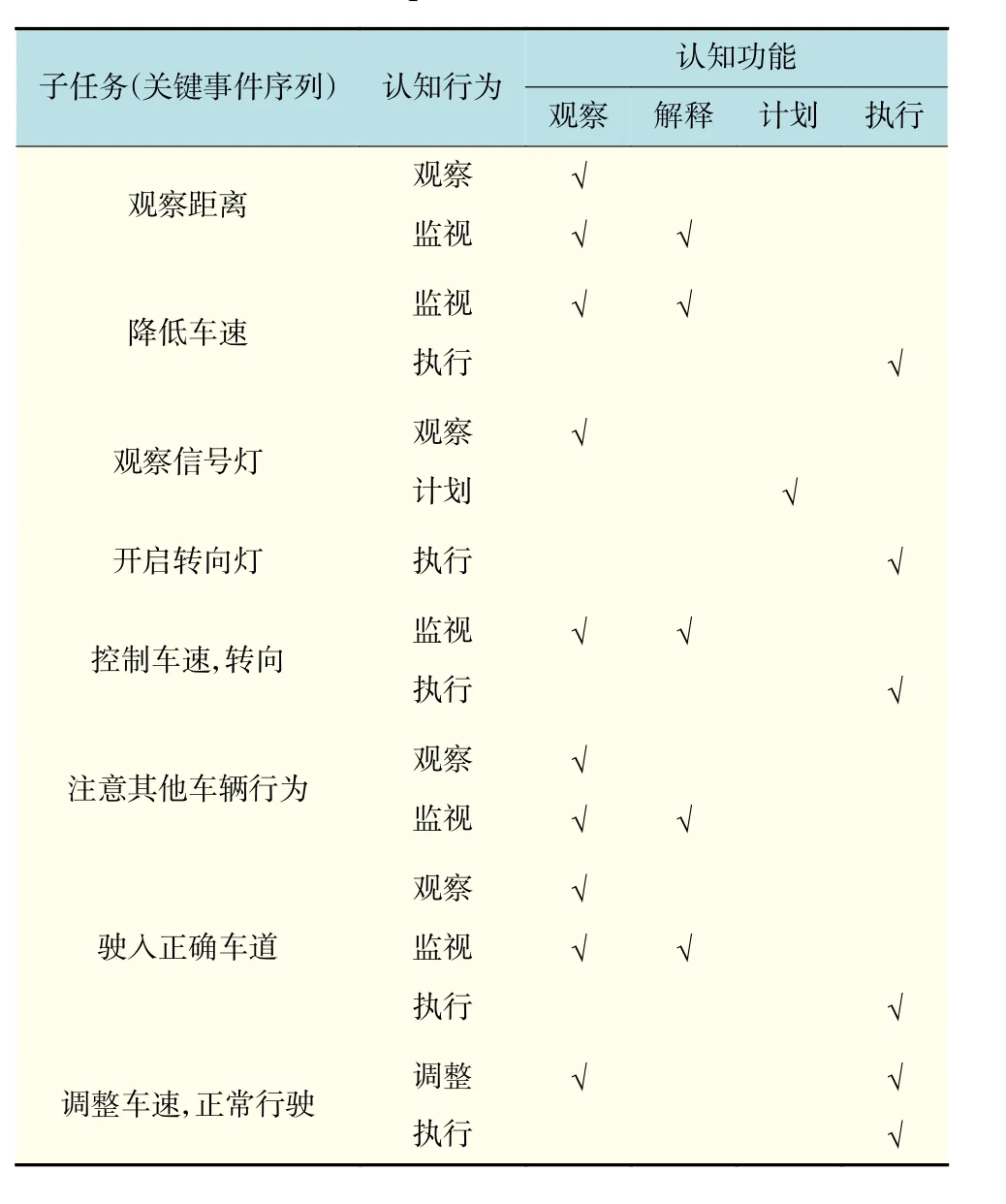
表1 关键事件序列对应的认知行为和认知功能Tab.1 Cognitive behavior and cognitive function corresponding to critical event sequence
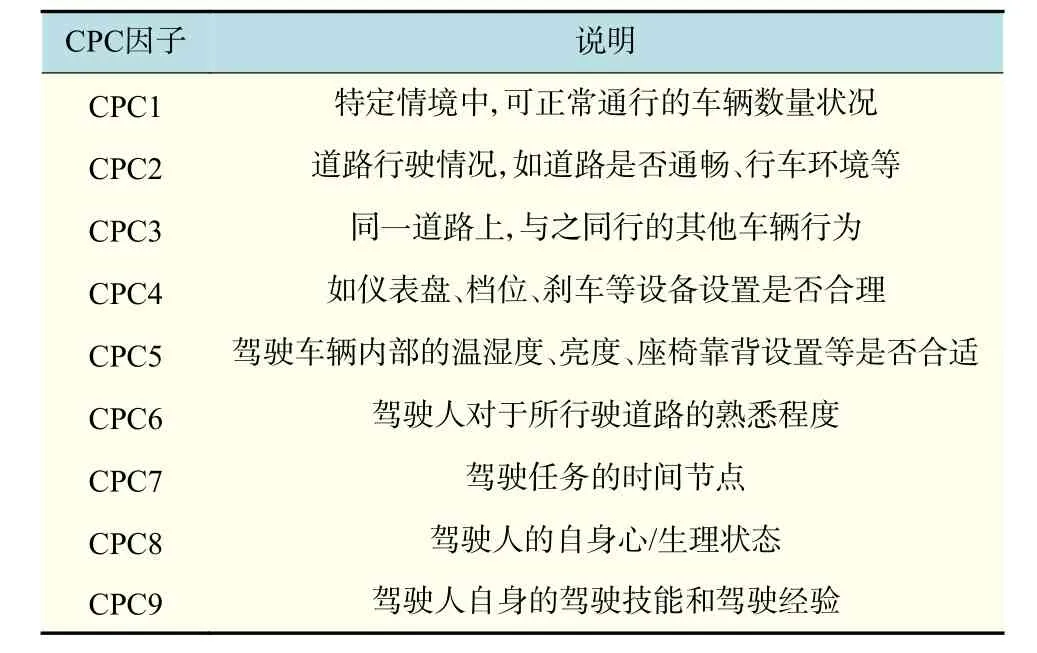
表2 CPC因子说明Tab.2 CPC factor description
2.3.2 确定CPC因子的影响权重
DEMATEL方法是一种处理因素内部影响关系的有效方法[18]。对于本文所讨论的驾驶任务来说,利用DEMATEL方法,在综合考虑CPC因子之间的相互影响关系的基础上确定9种CPC因子的影响权重,从而对每一项认知活动下的CPC总权重因子进行修正。
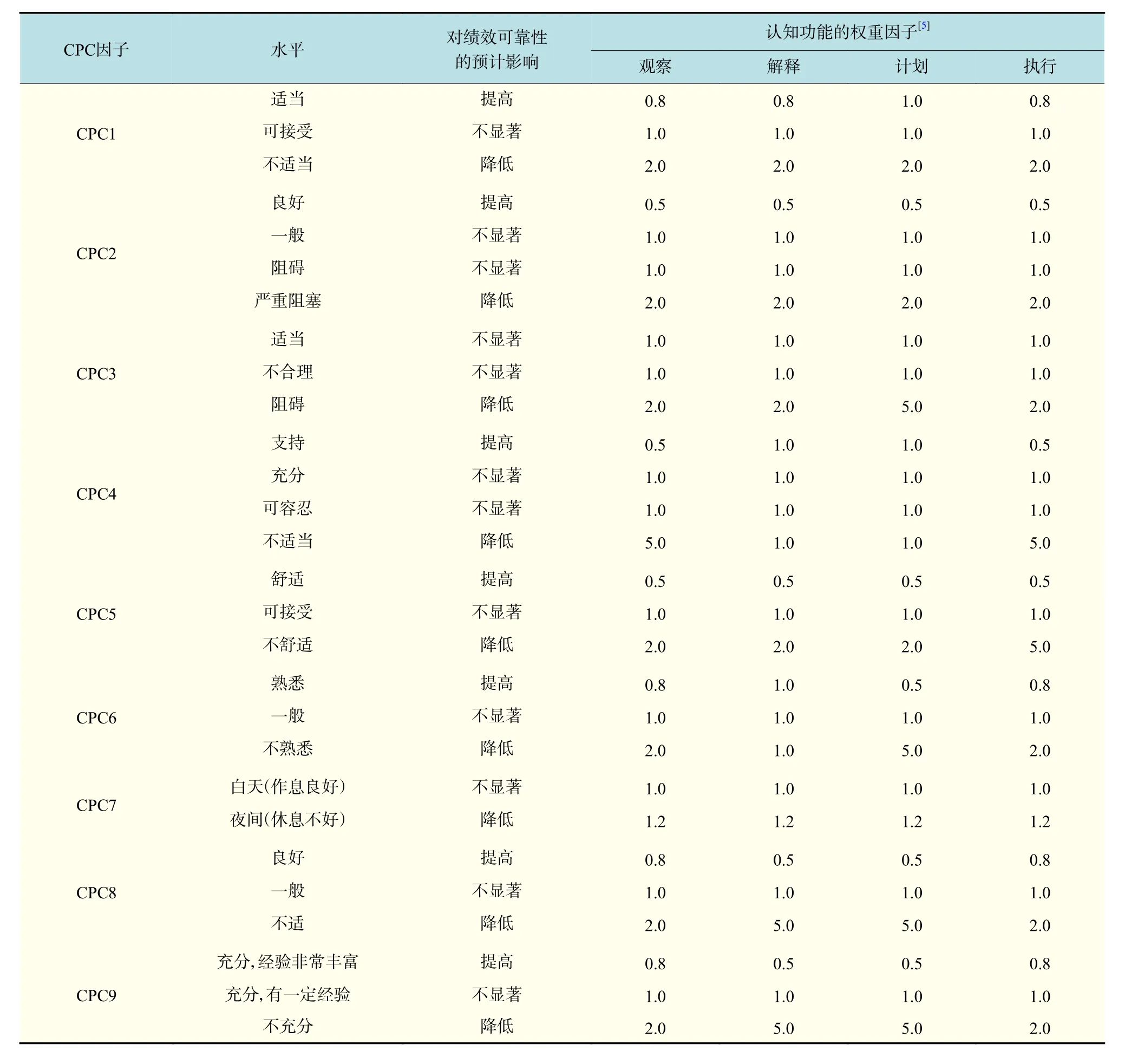
表3 共同绩效条件(CPC)对认知的影响Tab.3 Influence of CPC on cognition
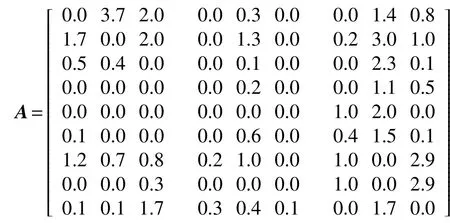
设计用于DEMATEL方法的问卷,对于因素之间的影响程度采用5级标度,取0—4表示程度大小,表示含义是{无,较小,一般,较大,非常大}。通过收集10位在交通驾驶领域经验丰富的相关人员的判断数据,建立各因素之间的直接影响矩阵A。

表4 CPC水平及对应的认知权重Tab.4 CPC level and corresponding cognitive weight
利用式(1)计算得到规范化矩阵G。

式中:aij表示矩阵A中第i行第j列的元素表示矩阵A第i行的各列元素之和。
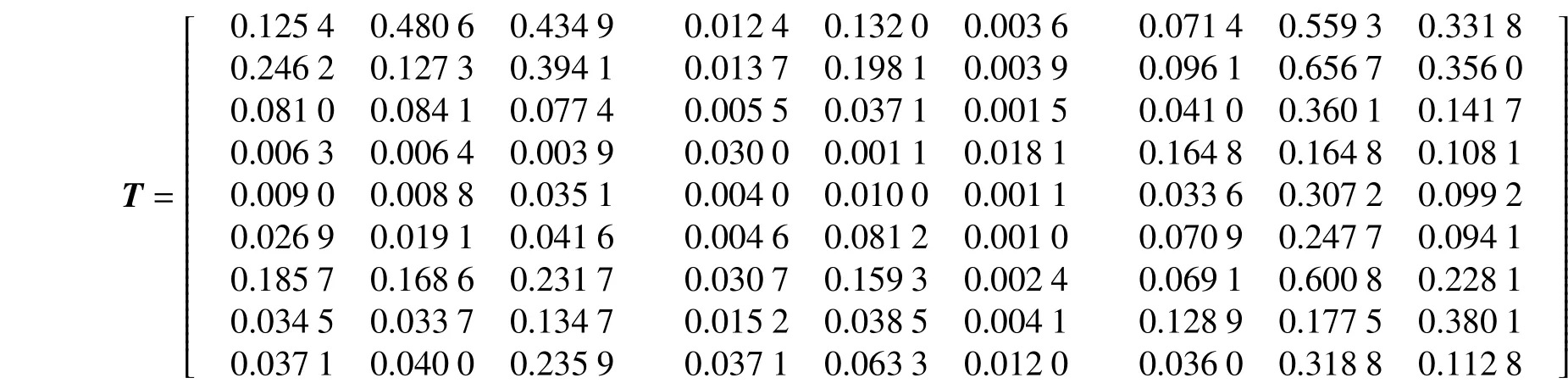
然后,利用python3.7编程计算得到综合影响矩阵T。

则
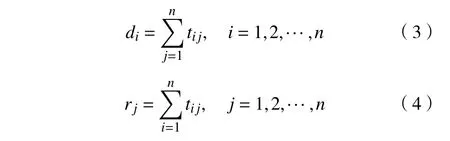
式中:tij为矩阵T中的第i行第j列的元素;di表示第i行的各元素对于其他元素的影响度,称为影响度;rj为被影响度,表示第j列的各元素受到其他各元素的影响度。
计算得到CPC之间的影响度和被影响度为
中心度可表示为di+rj,利用式(5)对中心度进行标准化处理。

标准化di+rj用来表示各CPC因子的权重[18]。通过计算得到每个CPC因子的影响权重为

2.4 识别认知功能失效模式
CREAM方法提供了13类认知功能失效模式,如表5所示[5]。
驾驶行为会有个体差异,但是,处于相同阶段的驾驶人驾驶行为会有一定的规律性,如经验不足的驾驶人往往会犯技能上的驾驶差错[19]。针对本文的研究,为了避免不同驾驶经验对于驾驶行为的影响,选取实际驾龄在2~3 a,年龄在30~40岁的男性驾驶人作为研究对象,即研究对象的驾驶经验水平处于“充分,有一定经验”阶段。对他们最有可能犯的认知失效模式类型进行问卷调查,对于转向中的关键事件序列,问卷共设置了24种驾驶错误,可归类到表5中的13类认知失效模式之中。通过对收集到的108份有效问卷进行分析,得到普遍情况下驾驶转向任务中驾驶人最有可能出现的认知失效模式,如表6所示。
2.5 改进总权重计算公式,预测人因失误率
根据前面的分析以及表5和表6,可以得到每一个关键事件序列最有可能的失效模式以及对应的认知失效概率,此时获得的是该项认知活动的标称失效概率值CFPbc,CPC因子可以对认知失效概率值产生影响,根据表4可知每个CPC因子下各认知功能的权重因子,每个认知功能下所有CPC因子对应的认知功能权重的乘积,即该认知功能的总权重因子Wz。现在考虑CPC因子自身的影响权重wi,记给定的认知功能的权重因子为pi,利用式(6)对总权重因子的计算公式进行改进。
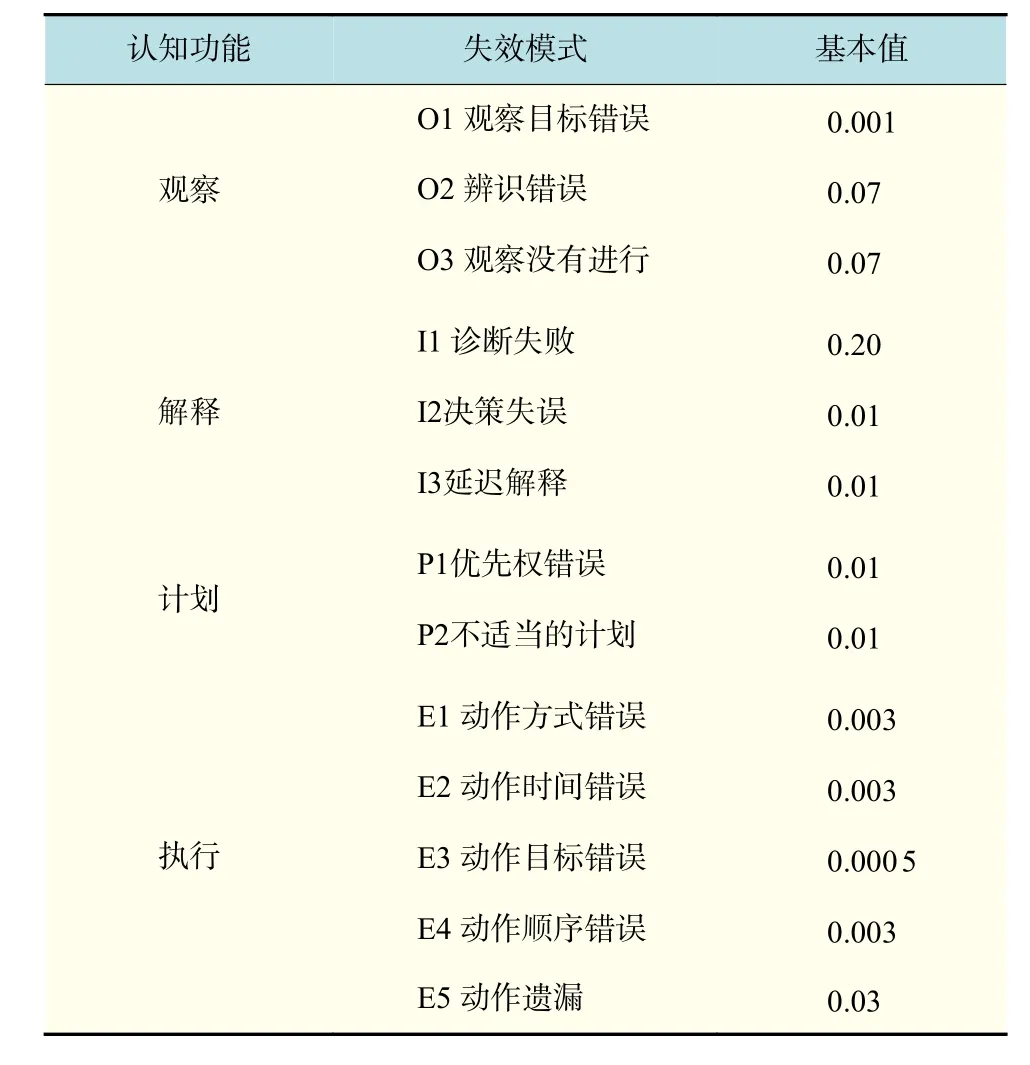
表5 认知失效模式Tab.5 Cognitive failure mode
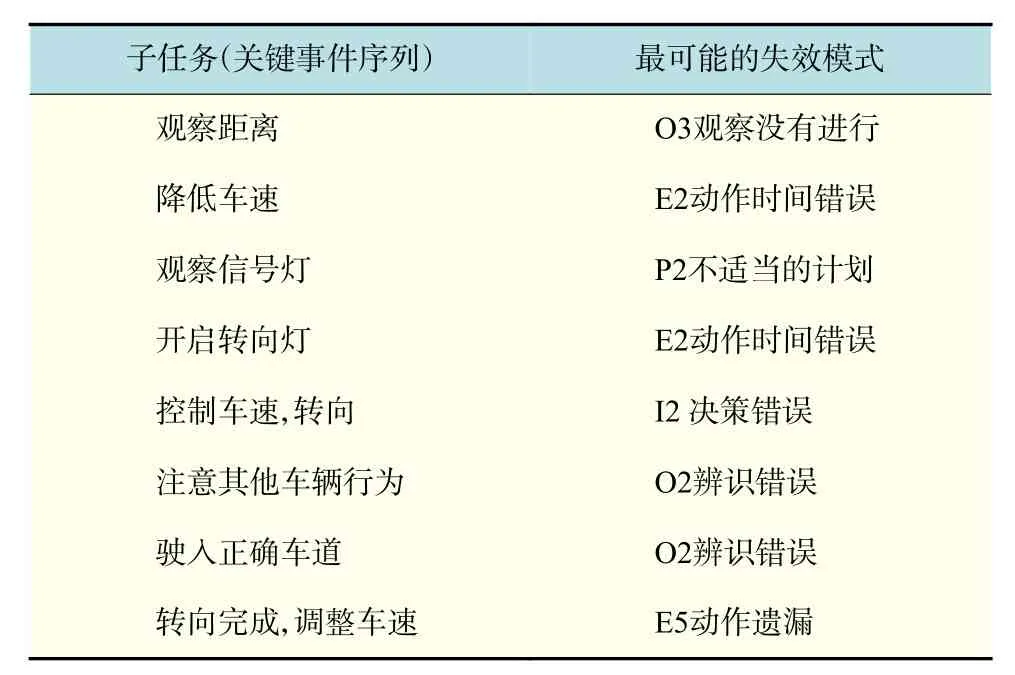
表6 驾驶转向任务中驾驶人最有可能出现的认知失效模式Tab.6 The most common cognitive failure mode in steering task

CPC因子修正后,驾驶人的认知失效概率CFPxz=CFPbcWz。将一系列计算结果列于表7。
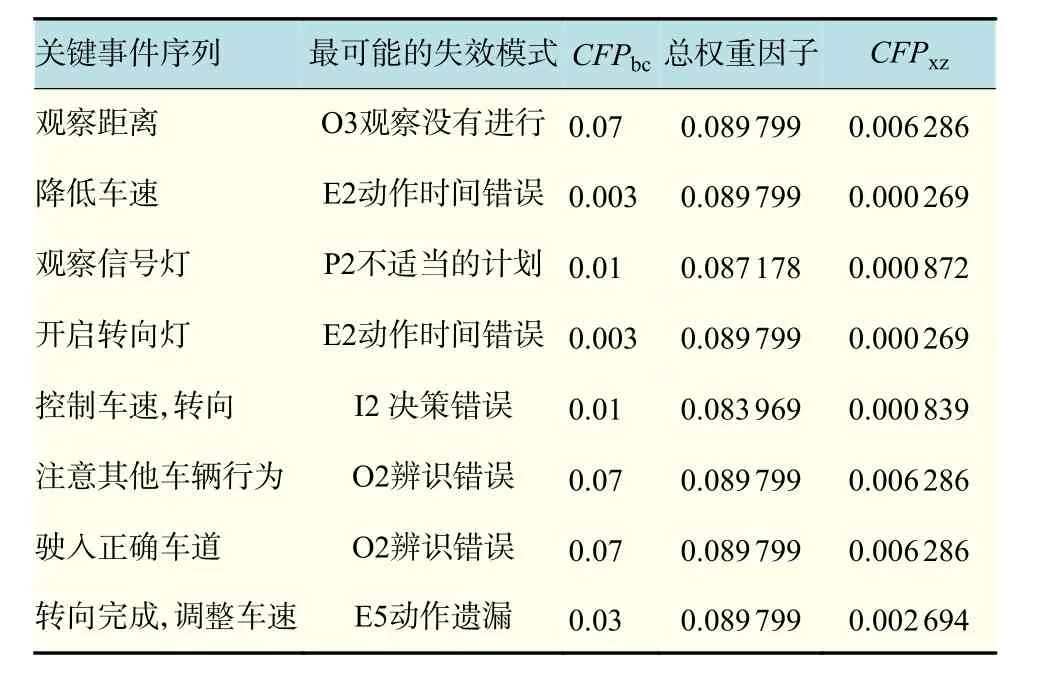
表7 关键事件序列失效概率(1)Tab.7 Failure probability of critical event sequence (1)
最后,根据图1所示的驾驶转向任务的关键事件序列,由式(7)计算该驾驶任务中人因失误概率P。

式中,CFPi表示第i项操作的认知失效概率。
根据表7的数据,计算得到在具有交通信号灯的十字交叉口驾驶车辆进行转向任务中的人因失误率为2.3582×10-2。
通过上述驾驶人人因失误定量化预测过程,可知驾驶转向任务中每一步操作的认知失效概率,如表7所示,实现量化分析每一步操作。在转向任务一系列操作中,观察距离(车距)、注意其他车辆行为和驶入正确车道这3项操作中最容易发生失误,3项操作都属于观察活动,因此,可以着重通过改善这3项活动的认知权重来大大降低人因失误率,进而提高驾驶安全。将驾驶任务进行分解,分析影响人因失误最大的操作行为,为规范驾驶人操作培训规程以及安全考评提供有力的支持。对于已经发生的事故也可以通过CREAM扩展法定量分析找出失误率最高的人误事件,然后利用回溯法进一步追溯发生事故的原因,建立系统的事故原因分析体系。另外,改进CREAM方法,并将其应用在驾驶转向中,可促进人因可靠性方法在交通领域的发展和应用,有助于解决交通领域对于驾驶人人因可靠性分析数据缺乏这一问题,同时也弥补了以往只能通过定性方式分析驾驶人可靠性的缺陷。CREAM方法具有很强的应用性,在实际情景应用时,只需对现场环境和驾驶人状态进行评估,确定CPC因子及其所处水平,对驾驶人认知失效模式作出判断,即可快速应用此方法实现驾驶人人因失误的量化分析。
3 改进的CREAM扩展法的合理性及有效性分析
3.1 合理性分析
利用上述改进的CREAM方法可以预测特定驾驶场景下驾驶转向任务中的人因失误率,为了证明改进方法的合理性,利用人因可靠性分析中的一个公理对其进行验证[20],即微小改变CPC的状态,会对人因失误率产生影响。积极的改变,会降低人因失误率;消极的改变,会增大人因失误率[21]。
在上述的驾驶情景下,取CPC9这一影响因素,以上述讨论的因素水平为基准,其他因素不变的情况下,只改变CPC9的状态,分别进行积极改变和消极改变,用上述改进过的CREAM扩展法进行计算,结果如表8所示。

表8 3种状态下的人因失误率(1)Tab.8 Human error rate in three states (1)
从表8可以看出,改变CPC因子水平,积极改变下,人因失误率降低,消极改变下,人因失误率增大。结果与公理所述相符,改进方法的合理性得到验证。
3.2 对比分析
为了更好地说明改进后CREAM方法的有效性,与改进前的CREAM方法量化分析结果进行对比分析。利用传统的CREAM方法,对上述情境下定量化分析得到驾驶转向任务中每一步操作的人因失误率列于表9,与使用改进后的方法定量化分析结果相比,驾驶任务的关键事件序列中,两种方法分析的最容易发生人因失误的认知活动是观察,这一结果符合客观实际情况,观察这一认知活动贯穿于整个驾驶任务,并且是解释、计划、执行等认知活动的基础。

表9 关键事件序列失效概率(2)Tab.9 Failure probability of critical event sequence (2)
微小改变任一CPC因子的状态,计算3种状态下的人因失误率,观察其变化,结果列于表10。

表10 3种状态下的人因失误率(2)Tab.10 Human error rate in three states (2)
从表8的结果可以看出,当积极改进影响因素水平时,虽人因失误率降低,却改变相对较小,降幅仅为3.7%,但是,消极改变影响因素水平时,人因失误率大幅度增加,增幅为20%。从表10的结果来看,当积极改进影响因素水平时,人因失误率降幅为5%,消极改变影响因素水平时,人因失误率虽增大,但增幅极其小,增幅为5%。从结果变化来看,改进后的方法量化分析结果更加符合实际调查情况,即与正常情况下相比,外界环境或者自身状态处于更佳水平时,并不会明显减少驾驶人的人因失误率,但当环境或自身条件低于正常水平时,则会大大增加人因失误率,进而大大增加了发生严重交通事故的概率。
4 结 论
a.首先对普遍情况下驾驶人驾驶车辆在具有交通信号灯的十字交叉口进行转向任务的关键事件序列进行了分析,改进了CREAM扩展法,赋予CPC权重,改进认知活动下CPC的总权重因子计算公式,预测驾驶人的人因失误率,实现了对驾驶人人因失误的定量化分析。
b.提出了一种基于改进CREAM扩展法的驾驶转向任务中驾驶人人因失误量化方法,利用人因可靠性分析中的公理验证了改进方法的合理性,结合实际分析了其有效性,为驾驶人人因失误量化分析研究提供方法借鉴。
c.在定量化的过程中,根据实际环境中最普遍的情况确定CPC因子水平,而对于某一次具体的驾驶转向任务来讲,CPC因子水平可能会有一些微小的改变,因此,未来在对具体的某一次任务进行分析时,可以增加对CPC因子水平等级的客观性评价。