面向海洋牧场的水下机器人强度校核
2021-01-26卓悦悦高洁许炜灿朴金宝
卓悦悦,高洁,许炜灿,朴金宝
(南通理工学院电气与能源工程学院,江苏 南通 226001)
近年来随着水下机器人在海洋牧场中的广泛应用,常规水下机器人的潜航深度已经不能满足航行任务的需要。发展大深度的水下机器人逐渐被各国重视起来[1]。但随着水下机器人潜航深度的增加,耐压壳体的承压能力问题也就越来越突出。迎流耐压壳体是水下航行器的重要承压部分,必须对其强度进行计算。近年来,国内外许多优秀学者对水下机器人耐压壳体进行了大量的强度计算与优化,为我们校核水下机器人的强度提供了经验。如何雪浤[2]等应用有限元和理论分析相结合的方法,对水下机器人进行了结构优化及全面的结构分析。陈永华等[3]将AUV 模型前部设计成具有正高斯曲率的椭球面,相对于平端面提升了耐压性能。基于前人经验,该团队设计的一款面向海洋牧场的水下机器人,其耐压前罩壳体的受力相对要大一点,所以该项目选取水下机器人的耐压前罩壳体进行强度分析。
该文采用有限元分析软件ANSYS,通过建立合理的有限元模型、加载、分析强度,获得迎流耐压壳体的应力情况,为其结构设计提供重要的理论依据。
1 概念设计
1.1 外观设计
目前,主流的ROV 主要造型有3 种:框架型、流线型、混合型。这3 种外观造型各有千秋,能够适应不同的水域环境。该项目研制的水下机器人结构采用流线型,这样的设计既保证了纵横向水流对水下机器人的影响最小,又能减少船体的重量,还可以提升整体的美观。小型水下机器人在左右侧各设计了一个水平推进器及在尾部设计一个垂直推进器作为它的主要推动设备。这样的设计可以有效地减少水下机器人在水中前行时的阻力,提高它的航行速度。水平推进器和尾部垂直推进器中间夹着设备舱,设备舱是前罩为圆弧状、壳体为圆柱体的密封空间,所有的电子设备都被安装在设备舱中,内部还装有一块4 串1 并的锂电池。在设备舱外部用自制的3D 打印机打印了外板固定设备舱和推进器[4]。图1 所示为水下机器人三维设计整体效果图。

图1 三维设计整体效果图
1.2 工作方式
水域环境复杂、水流速度快、潜水人员体力有限等因素都易导致水下作业受阻,水深若是超过30 m 其安全风险将会更大。水下机器人可在工作人员在不用下水的情况下,完成许多水下作业,如水下捕捞、水下环境监测、水下视频观测和水下目标定位等。
水下机器人由两部分组成。一是水下部分,包括四个推进器、一个高清摄像头、声呐系统、水下照明设备等;二是水上部分,信号控制终端通过脐带缆与水下机器人互联互通,为其提供控制信号,水下机器人所采集的视频信号和传感器信号也将通过脐带缆传输回控制终端。
同时,海洋牧场的水下机器人设计有自主规划路径系统和监测识别系统等关键技术[5],保证了水下机器人在水中稳定地航行和检测水下环境,其中自主设计的高清摄像头可清晰地拍摄水下周围环境。
2 迎流耐压壳体有限元分析
2.1 建模
应用有限元软件ANSYS 对水下机器人的耐压壳体进行强度分析,首先我们建立了耐压壳体前罩模型。据分析可知,前罩部分的受力最大,这部分满足强度要求可代表水下机器人的耐压壳体满足强度要求。这样既可以缩小计算规模,也不会对分析结果造成较大的影响。
我们采用三维辅助设计软件如Solidworks 建立几何模型,然后通过输入接口导入有限元分析软件ANSYS 中,采用ANSYS 软件完成分析过程[6]。迎流耐压前罩壳体的初始模型如图2 所示,其壳体为半圆形薄壁结构,壳体壁厚为5 mm,端盖厚度为5 mm。耐压壳体选用有机玻璃加工制造,密度为1.19 kg/cm3,杨氏模量3E+09pa,泊松比为0.33,冲击强度≥16 kg/cm3,拉伸强度≥61 kg/m3。将迎流耐压壳体的端盖模型导入ANSYS 平台后,进行网格划分,起初我们尝试采用自由网格划分,由ANSYS 软件自主生成,操作方便。但是自由划分的网格在前罩壳体的螺纹孔处计算结果有较大的误差,为了减少误差,我们采用Solid186 单元划分六面体网格,其单元总数为24 715,节点数为 1 105 502。
2.2 边界条件设置
边界条件的确定是根据球体几何结构来添加载荷与支撑边界条件。在球头施加载荷压力,根据迎流耐压壳体的实际工作水深,同时考虑适当的安全系数,在耐压壳体外表面施加3 MPa 的压力。固定支撑是在尾部法兰端面加固定约束,迎流耐压壳体端盖有限元模型如图3、图4 所示。
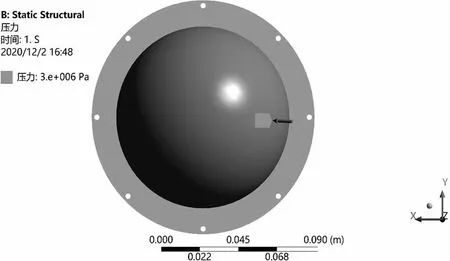
图3 载荷压力

图4 固定支座
2.3 迎流耐压壳体的强度分析
使用ANSYS Workbench 进行仿真计算,在很大程度上减小了工程难度,由于其具有分析计算数据结果准确、计算过程便捷等优点,不仅可以极大提高工作效率,还使过程更简捷化。
相对应地,ANSYS 有4 种应力工具:最大等效应力工具,最大剪切应力工具,摩尔库伦应力工具,最大拉应力工具。前两种主要评估韧性金属材料强度,后两中主要评估脆性材料强度。我们采用第四强度理论(又称最大形状改变比能理论),也就是我们常用的等效应力,由下式表示:

这一理论认为形状改变比能是引起材料屈服破坏的主要因素,无论什么应力状态,只要构件内一点处的形状改变比能达到单向应力状态下的极限值,材料就要发生屈服破坏。我们取前罩壳体上的一点切成微小正六面体进行单元应力分析,如果受应力最大点的主力方向的应力小于许用应力[σ],则不会发生破坏。
ANSYS 软件的结构静力分析是用来计算固定不变载荷或近似为等价静力随时间变化的载荷作用下结构的响应,即由于稳态外载引起的系统或部件的总变形,等效弹性应变,等效应力等。迎流耐压壳体整体总变形如图5 所示,等效弹性应变如图6所示,等效应力如图7 所示。通过图7 所示,最大等效应力为0.4 Mpa,发生在前法兰与壳体连接处,未超出材料许用应力,所以满足要求。通过图5 所示,变形可得最大变形0.27 mm,满足设计要求。

图5 迎流耐压壳体整体总变形

图6 等效弹性应变

图7 等效应力
3 结论
运用Solidworks 软件建立了迎流耐压壳体的三维模型,模型简化后导入 ANSYS 软件中进行了强度分析。通过有限元分析软件Workbench 仿真,对水下机器人有机玻璃壳体进行有限元分析,得到理想的仿真结果,这对于水下机器人的设计与改进,提高其耐压性能有着重要意义,是既经济又有效的科学化方法。该文迎流耐压壳体已在某水下航行器模型中实际应用,经外压试验和湖试验证,其耐压强度满足设计要求,使用安全可靠。

