微波雷达在基坑变形监测中的运用
2021-01-25邓树密
李 斌, 邓树密, 任 刃
(中国水利水电第十工程局有限公司,四川成都 610072)
随着我国地铁交通的快速发展,大型基坑不断涌现,这对基坑的安全施工和安全运营提出了更高要求,特别是对施工工程中的高精度监测要求更加突出。传统变形监测技术虽有广泛的运用,但在应用中也存在较大的局限性,例如:全站仪工作强度较高,效率低,GPS的测量精度低,且稳定性有待提高 。同时光学测量技术在光照较差或恶劣天气条件下,光学系统的测试效率会受到重大影响[1-4]。本文结合成都轨道交通某线中的一座明挖车站基坑施工过程中自动变形监测工程实例,对基于微波雷达对基坑侧壁水平变形监测进行了研究和探讨。
1 工程实例
1.1 工程概况
成都轨道交通某线线路全长43.186km,均为地下线,共设地下车站12座,其中换乘站10座,预留站1座,最大站间距: 5.84km,最小站间距: 1.461km,平均站间距为3.578km,同时设停车场1座,主变电所2座,其中一座明挖车站采用地下二层15.6m岛式站台,车站总长429.9m,标准段总宽27. 4m,车站基坑深22.7m,车站结构顶板覆土5.08m。根据成都轨道交通对该条线网的总体筹划,该车站大里程接盾构区间(始发),小里程端为明挖区间,主体结构为地下二层岛式框架结构,采用明挖法施工,采用放坡+土钉墙进行支护,采用地面截排水+坑底积水明排进行降水[5]。基坑现场开挖见图1。

图1 基坑现场开挖
1.2 地质情况
根据地勘报告,该站HLCZ-014钻孔柱状图13~19轴区域依次揭示为:杂填土(3.0m)、粉质黏土(4.7m)、全风化泥岩(0.5m)、(2m)强风化泥岩(6.7m)、强风化砂岩(1.5m)和强风化泥岩(4.3m)。该区域整体地层岩性较差。已开挖基坑岩性基本为杂填土和粉质黏土,见图2。

图2 基坑开挖地质
2 微波雷达变形测试原理
基于线性调频连续波技术和相位干涉原理的测量设备。首先发射器调制一组线性调频连续波正交同相(I/Q)信号,然后主信号由发射天线向被测目标方向发射,剩余信号作为本振信号,经被测目标反射,反射信号被接收天线接收,并与本振信号混频、滤波、采样后得到包含距离信息和变形信息的差频信号,通过对差频信号进行快速傅里叶变换后可得差频,依据差频和被测目标距离的关系可得到目标距离,通过差频定位到相位谱中的相位,多个扫频的相位进行干涉计算可得被测目标的变形信息。通过两次发射相位差来测量振动位移,如图3所示。

图3 测试原理
雷达工作波长λ;第一次目标测量相位φ1;第二次测量相位φ2;两次测量间目标在雷达视线上的位移量d。假设雷达发射信号频率、初始相位分别为f0、φ0,则发射信号VT、回波信号VR分别可以表示为:
VT(t)=Acos(2πf0t+φ0)
(1)
VR(t)=Acos(2πf0t+φ0-φ)
(2)
式中:A为发射信号的幅度;η为回波信号幅度的衰减系数;φ为回波信号与发射信号间的相位差。
相位差φ与发射信号频率f0和回波信号时间延迟T相关:φ=2πf0T;而回波信号时间延迟T与目标离雷达的距离L的关系满足下式:
T=2L/c
(3)
式中:c为微波信号的传播速度。则相位差φ与距离L的关系又可以表示为:
φ=4πf0L/c
(4)
由于相位测量存在一个周期性的模糊问题,即总的相位φ为φ=N× 2π+φ,而在实际相位测量时,不能得到图1中相位差φ的整周期部分N×2π,只能得到相位差φ的余数部分φ=φ-N×2π。然而,这并不影响目标位移的测量。将相位差φ=N× 2π+φ代入式(4) 可得:
N× 2π+φ=4πf0L/c
(5)
进而,距离L可以表示为:
L=φc/4πf0+Nc/2f
(6)
又有λ=c/f0,式(6) 进一步表示为:
L=λφ/4π+λN/2
(7)
当目标发生移动、且移动量小于微波周期半长度λ/2时,可以认为相位差φ的距离整周期部分保持不变,距离L的变化量仅体现在式(7) 的第一项中,对式(7) 差分,可以得到目标位移表达式
ΔL=λΔφ/4π
(8)
同时,将相位差φ=N×2π+φ代入式(2) ,回波信号也可以表示为:
VR(t)=Acos(2πf0t+φ0-φ)
(9)
因此,在进行实际测量时,通过测量回波信号与发射信号间相位差余数部分φ的变化量,即可得到目标的位移量。显然,此类相位解调的方法都只适合测量相对位移量ΔL而非绝对距离L。
3 监测方案
监测要求应满足GB50911-2013《城市轨道交通工程监测技术规范》、GB50497-2009《建筑基坑工程监测技术规范》和成都轨道交通集团公司等相关文件的规定,本工程监测方法及精度要求如表1所示。
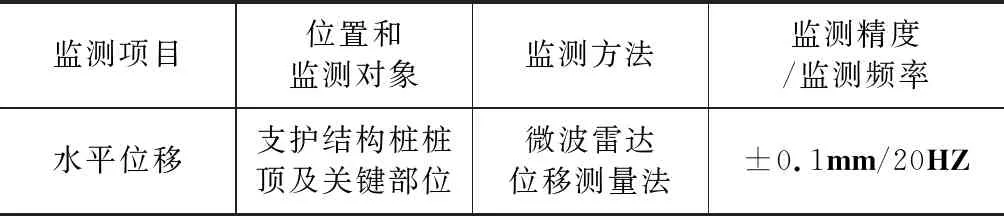
表1 基坑变形监测
4 监测结果及原因分析
为了分析基坑支护结构桩顶的水平位移,对基坑的CX6~CX8安装了3个雷达反射体进行监测。现场测试软件显示如图4所示。通过对2d(48h)不间断连续监测变形,测试图见图5。

图5 现场测试
由图6可知:CX8测点应变在一天48h内(2020年8月18~2020年8月19),在运行条件下的最大挠度7.74mm,超过安全预警值,表明基坑在外部作用下结构位移处于发展状态。

图6 CX8水平位移随时间变化曲线(2020年8月18~2020年8月19)
出现监测数据变化的主要原因有:
(1)根据土体测斜孔取芯情况,基坑开挖施工的岩土全风化岩呈土状,强风化岩呈碎块状,软硬不均,岩土呈弱~中等膨胀性,且水解黏性土作用沿裂隙面形成灰白色黏土“软弱带”,导致该区域地质整体情况较差、自稳性较差。
(2)监测期降雨较多,地表水渗入膨胀性土体,围护结构土体侧压力增大。土方开挖后,土体应力释放和二次重分布剧烈。加之,该区段基坑目前开挖深度在第二道锚索位置,开挖、喷锚及锚索工序时间较长,围护桩缺乏有效约束而出现变形。
建议处理措施有:
(1)建议以桩体水平位移监测值和土体水平位移监测值指导施工,继续开挖,若后期变形数据过大,再放坡卸载。
(2)对变形较大区段,在距围护桩1.5m处进行挖槽取土,成槽后及时回填砂卵石,释放桩背土压力,形成土压力缓冲层。
(3)对已完第一道锚索补张拉。
(4)加强基坑内外截、排水及防洪排涝措施,做好坑壁排水和泥岩面及时封闭,增加一排深层排水孔布置,降低地下水位影响。
(5)分台阶开挖,缩短单次开挖轴线长度,加强工序衔接,缩短锚索施工周期,及时张拉。
5 结论
微波雷达对结构位移的监测室非接触、高精度、全方位的特点,能够对结构的微小变形进行测量,相对其他监测手段,野外劳动强度低、效率高,不受气象条件影响,且操作简等优点,值得大力推广运用。
