基于TLGI技术的纯电动汽车车用电动机新型控制
2021-01-25吴迪瑞田韶鹏
吴迪瑞, 田韶鹏
(1. 武汉理工大学 现代汽车零部件技术湖北省重点实验室, 湖北 武汉 430070; 2. 武汉理工大学 汽车零部件技术湖北省协同创新中心, 湖北 武汉 430070; 3. 武汉理工大学 湖北省新能源与智能网联车工程技术研究中心, 湖北 武汉 430070)
纯电动汽车在节能、环保等方面具有独特优势,正逐步取代传统燃油汽车.作为新兴的技术,由于发展时间较短,特别是作为核心技术之一的电动机控制,在许多方面还存在不够完善的地方[1].永磁同步电动机系统是一个复杂、强耦合、非线性、时变的系统,实现电动机的精确控制存在很多困难,研究先进的电动机驱动控制方法已成为提升电动汽车控制性能的关键[2].永磁同步电动机控制策略主要有调压频控制、矢量控制、直接转矩控制、解耦控制、自适应控制、神经网络控制和模型预测控制等[3],应用较广的是矢量控制和直接转矩控制.
G. H.ERJAEE等[4]、WANG X. Y.等[5]、涂文怡[6]采用矢量控制方法,对电动汽车的电动机实现高精度、高速动态响应和宽调速范围的控制进行了研究,结果表明:该控制方式严重依赖电动机参数,电动机参数变化会对控制的动态特性产生不利影响. LI G. H.[7]为克服矢量控制受参数影响的缺点,采用直接转矩控制,提高了系统的可靠性,但这种方式控制难度大幅增加,同时会引起电动机启动时转矩的短时脉动. CHEN X.[8]采用多输入多输出滑模变结构控制方法设计控制调节器,并利用电流环跟踪脉冲宽度调制(PWM),实现了定子电流的精确控制,但定子三相电流有一定的畸变,并且转矩在负载变化时有明显的跳变. 王雨田[9]对纯电动汽车多模式之间切换进行了研究. 王福杰[10]为优化电动机的启动性能,对比分析了模糊PID控制和神经网络PID在永磁同步电动机闭环控制方面的效果,结果表明:神经网络PID控制在抗扰动方面优于模糊PID控制,而模糊PID控制在实时性方面较有优势.
鉴于电动汽车在行驶过程中,受到电源电压、道路工况和驾驶模式等诸多因素的影响,同时考虑上述控制方式的优缺点,笔者在空间电压矢量调制技术(SVPWM)矢量控制的基础上,针对传统的直接转矩控制在PMSM转速较低时转矩脉动大的缺点,提出基于TLGI技术的SVPWM的新型控制方式,对永磁同步电动机控制系统进行Matlab/Simulink仿真,以验证控制方法的合理性.
1 永磁同步电动机数学模型
根据电动机统一理论,建立永磁同步电动机数学模型,三相绕组的电压平衡方程[11]为
(1)
式中:uA、uB、uC分别为A、B、C三相的定子相绕组电压;R为定子电阻;iA、iB、iC为A、B、C三相的定子相绕组电流;p为微分算子;L为每相绕组的自感;M为每相绕组互感;Pn为极对数;ψ为电动机磁通;θ为转子位置角.
电动机数学模型结构如图1所示,其中:ud、uq分别为定子的d、q轴电压;id、iq分别为定子的d、q轴电流;Ld、Lq分别为定子的d、q轴电感;ω为电动机电角速度;np为电动机转子转速;Te为电动机电磁转矩;TL为电动机负载转矩;Jp为电动机转动惯量;ψf为转子永磁体产生的磁链.
2 矢量控制原理
坐标变换和空间电压矢量调制技术是永磁同步电动机矢量控制系统控制原理的2大核心技术,其目的在于将永磁同步电动机这样一个非线性、强耦合、多变量的复杂控制对象进行解耦以便于控制,在与电动机旋转磁场同步的旋转坐标变换之下,将电流分解为励磁电流和转矩电流2个磁场定向的正交直流电流分量,并分别用直流电动机的方式进行控制,完成三相电流的解耦.永磁同步电动机矢量控制框图如图2所示.
永磁同步电动机根据控制目的及场合不同,对于矢量控制策略选择也有不同,通常有以下4种控制方式:① 励磁电流id=0,此时,电动机的给定输入只有给定转速,定子电流全部转为转矩电流; ② 功率因数cosφ=1控制,整个控制过程中保持电压矢量与电流矢量在同一方向上; ③ 最大输出功率控制,控制轴电流id来获得最大转矩; ④ 弱磁控制,当逆变器输出电压最大后,仍需提速,需要减小转矩电流、增大励磁电流维持电压平衡,削弱磁场,减少磁通.笔者采用第1种控制策略,即励磁电流id=0控制.
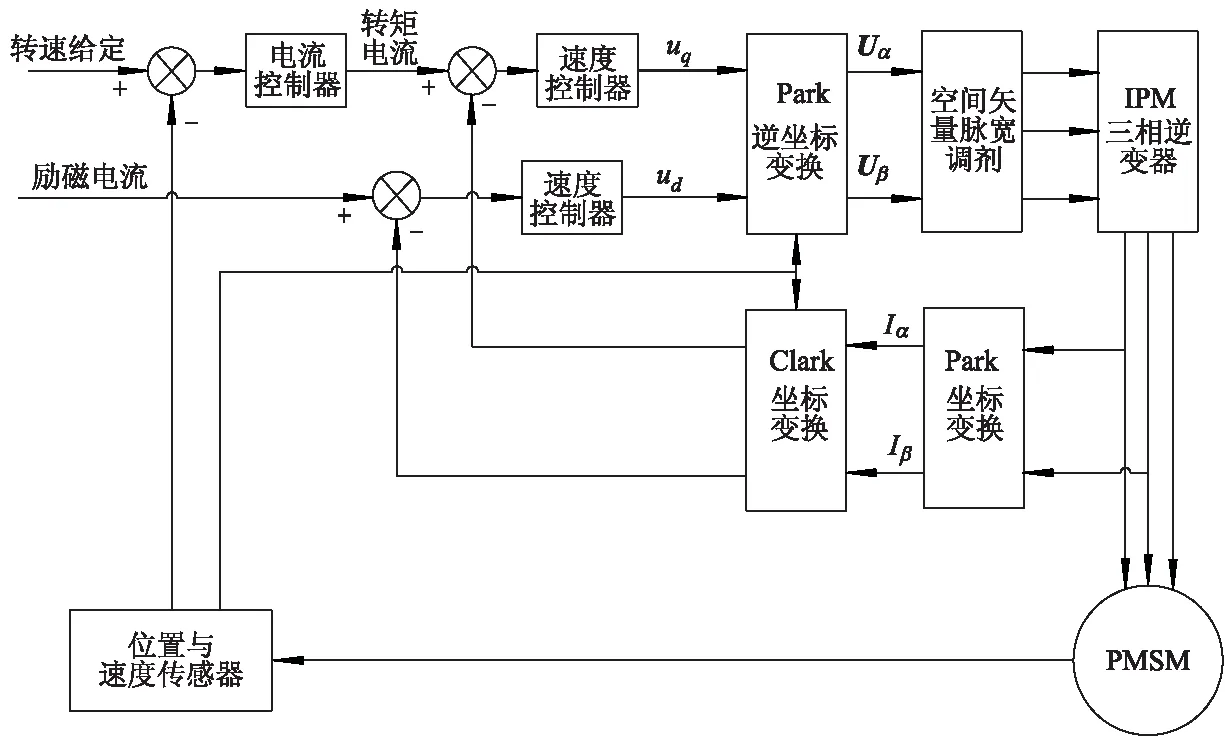
图2 永磁同步电动机矢量控制框图
2.1 经典的SVPWM直接转矩控制
经典的SVPWM控制,最重要的技术为坐标变换,在不同坐标系下产生的磁动势完全一致这个基本原则下,把交流电动机的物理模型进行等效变化,转换成类似直流电动机的模式,然后模仿直流电动机进行控制.传统矢量控制中,先把三相的ABC坐标转成两相的坐标,此过程称为Clark变换;再把静止坐标转化成不断变化的dq坐标,此过程称为Park变换,将三相静止坐标系下的PMSM的数学模型经过Clark和Park变换后,即得坐标系下的PMSM的数学模型,电压、磁链和转矩方程[12]如下:
(2)
(3)
ψd=Ldid+ψf,
(4)
ψq=Lqiq,
(5)
(6)
式中:ψd、ψq分别为定子磁链d、q轴分量.
由永磁同步电动机的电压方程和数学模型可以看出,d轴电压ud受d轴电流id及q轴电流iq的影响,这说明永磁同步电动机d轴电压和q轴电压存在一种耦合关系.
应用最广的PMSM电动机直接转矩控制系统选用三相逆变器桥式连接,开关元件选用IGBT.在确定已知直流环节电压UDC情况下,开关状态函数SA、SB、SC的不同组合、相电压和线电压如表1所示. 其中:UAN、UBN、UCN为相电压;UAB、UBC、UCA为线电压.
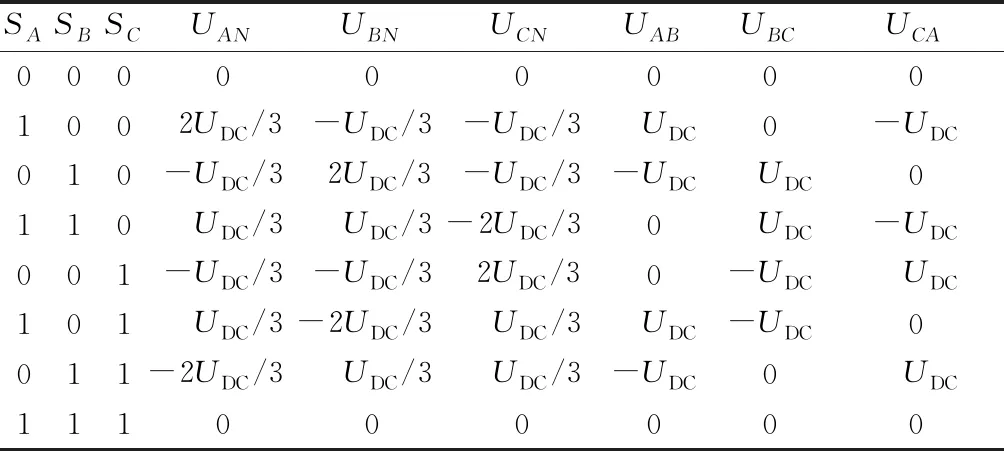
表1 SVPWM开关状态函数表
在ɑβ坐标系中,对电动机三相电压进行Clark变换,可得
(7)
式中:USα、USβ分别为三相电压经过Clark变换后在α和β轴上的合成电压.
合成电压空间矢量的函数表达式为
Uout=Uα+jUβ,
(8)
式中:Uout为空间合成电压;Uα、Uβ分别为在α和β轴的电压.
定子磁势空间矢量如图3所示,SVPWM离散控制8个基本空间电压向量的导通时间,使整个周期空间区域内经过8个电压向量的合成逼近原本Uα、Uβ产生的空间合成电压Uout.假设某一时刻电压向量处于0°到60°这个区间,此时U0、U60、O000、O111这4个基本电压空间矢量合成Uout,即
(9)
式中:T为采样周期;t01、t02为周期T内相邻开关状态累计导通时间;t0为周期内零状态累计导通时间.
由式(9)分解可得
(10)
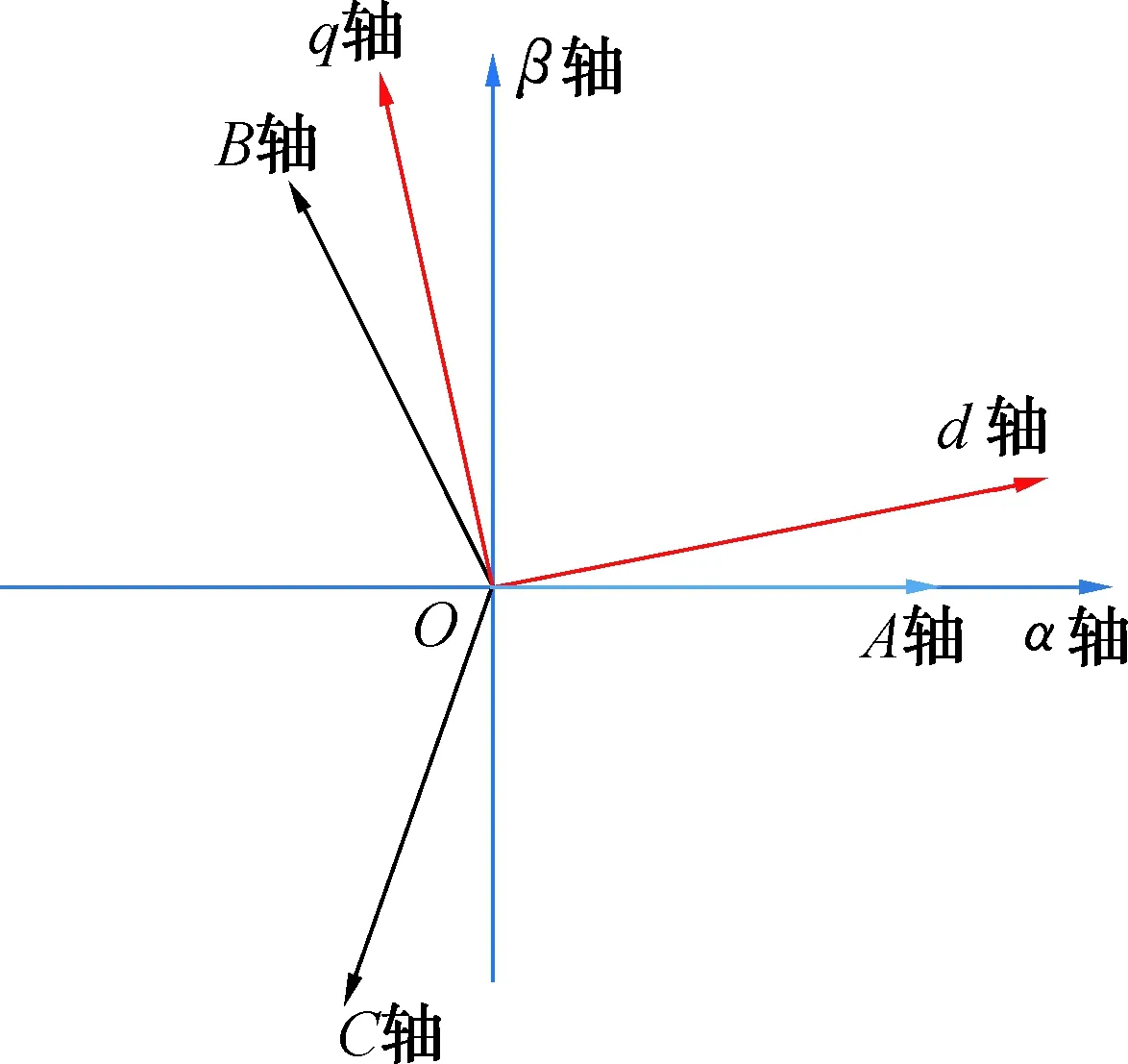
图3 定子磁势空间矢量
2.2 基于TLGI技术的SVPWM控制系统
虽然永磁同步电动机直接转矩控制结构简单,磁链沿着轨迹运动,转速响应快,但其输出的磁链、转矩脉动较大[13].采用二电平广义逆变器(TLGI)技术不同于电压正弦的PWM控制方式,而是采用磁通正弦SVPWM,磁通正弦SVPWM控制方式集开关逆变器与电动机于一体,具有电压利用率高、噪声低及转矩脉动低等优点.TLGI技术的SVPWM控制在相同条件下的电动机输出功率,可以使功率器件的尺寸降低,提升控制系统的过载能力,可以扩大PMSM在工业上的应用范围,提升电动机矢量控制算法的效率,避免资源消耗较多的三角函数与反三角函数的运算,实现DSP处理器最大限度运用.
2.2.1基于TLGI技术SVPWM控制电压幅值
TLGI技术可以简化为三级函数运算,则相邻开关状态的累计导通时间为
(11)
时间的标幺值t1、t2为
(12)
分区非零矢量作用时间变量X、Y、Z定义为
(13)
2.2.2电压矢量分区
确定电压矢量分区是基于TLGI技术SVPWM控制整个算法的关键步骤,需要建立1组辅助函数来确定基本电压空间矢量所在分区.遵循的规则是当空间电压合成向量Uout每转过60°,分区函数输出值改变1次,改变值与所处区间的序列一一对应,建立的辅助函数如下:
为便于判断大小设立的变量Uref1、Uref2、Uref3分别为
(14)
定义变量a1、a2、a3,若Uref1<0则a1=1,否则a1=0;若Uref2<0则a2=1,否则a2=0;若Uref3<0则a3=1,否则a3=0.则可令分区函数为
F=4a1+2a2+a3.
(15)
若t1+t2>1,则需对t1、t2进行过调制处理;若t1+t2≤1,则为原值.即
(16)
式中:tom1、tom2为过调制后的标幺值.
循环周期Taon、Tbon、Tcon由下式确定:
(17)
根据分区函数分区数,把Taon、Tbon、Tcon赋给三相电压的切换周期TA、TB、TC.赋值基本规律如表2所示,其中:U0、U60、U120、U180、U240、U300、U360分别为有效的基本空间电压矢量.
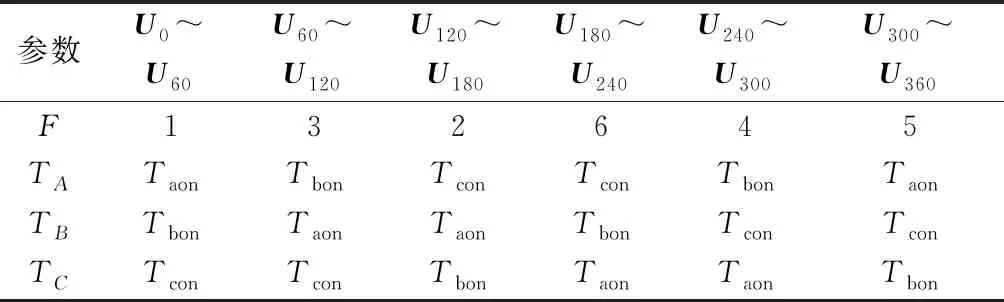
表2 TA、TB、TC赋值基本规律表
通过以上计算得出的7段式SVPWM算法,将基本矢量作用时间顺序的分配原则选定如下:每次开关状态转换时,只改变其中一相的开关状态,并且对零矢量作用时间平均分配,得到对称的PWM波形,从而有效降低了PWM的谐波分量.由SVPWM算法得到的调制波呈马鞍形,有利于提高直流电压利用率,有效抑制电压谐波.
3 仿真模型的建立
利用MatlabR2017b仿真软件,基于Simulink common库和SimPowerSystem库中的既有模块,搭建PMSM的矢量控制仿真模型.基于TLGI的SVPWM矢量控制系统主要是由电流、转速、力矩监控模块及Clark、Park变换及其逆变换模块和基于TLGI的SVPWM空间矢量脉宽调制等模块组成,其中基于TLGI的SVPWM矢量控制模块主要包括坐标变换模块和SVPWM模块,控制系统模型搭建流程如图4所示.
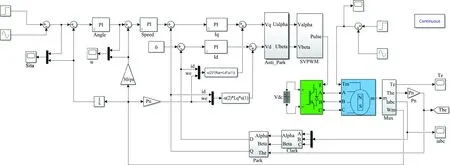
图4 纯电动汽车PMSM基于TLGI的SVPWM控制系统
4 仿真结果分析
在Matlab/Simulink中搭建永磁同步电动机基于TLGI技术的SVPWM的矢量控制模型后,进行仿真分析,仿真时规定PMSM的具体参数,研究对象参数如下:Pn=8;R=0.16 Ω;ψf=0.005 7 Wb;Ld=0.2 mH;Lq=89 μH;额定转速为2 000 r·min-1;仿真时间设置为2 s.电动机SVPWM控制电流波形如图5所示,电动机三相电流IA、IB、IC脉动均不大,且波形合理,相电流冲击很小,说明系统具有较好的鲁棒性.
输入转速nin与电动机响应nout比较如图6所示,经0.12 s调整后,系统输入转速和电动机响应基本达到一致,系统调节时间短,而且后续转速输入波形与系统响应波形吻合,无明显波动,转速响应速度快,运行在稳定状态时无静差,提高了电动机转速控制精度.
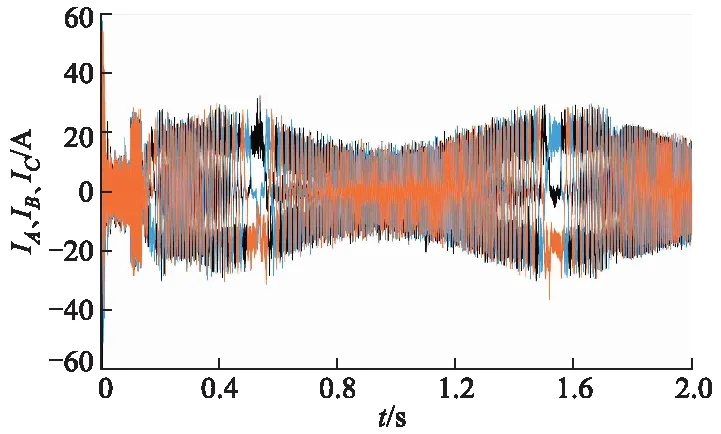
图5 电动机SVPWM控制电流波形图
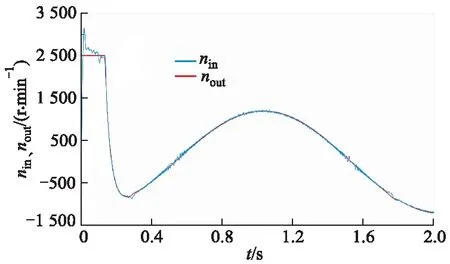
图6 输入转速与电动机响应比较
电动机SVPWM控制转矩波形如图7所示,在0.4 s时,转速突变,转矩波动时间短,转矩恢复较快,即超车加速工况下,电动汽车转矩脉动响应迅速,行驶稳定性较好;在0.8 s时,负载突变,转矩曲线仅有轻度浮动,大力矩爬坡工况下,纯电动汽车转矩脉动小,动力输出平稳,整车操纵稳定性好.
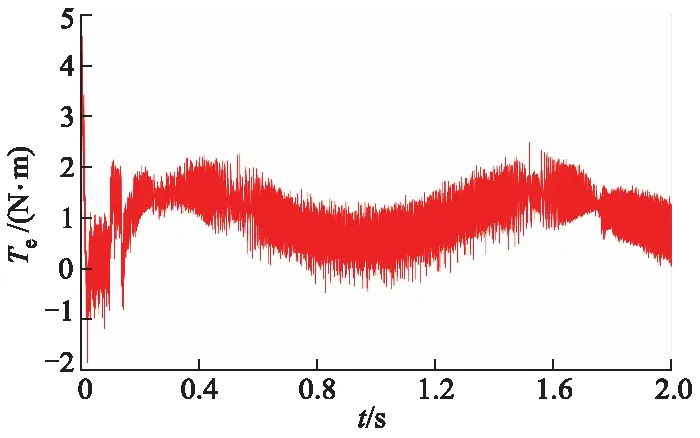
图7 电动机SVPWM控制转矩波形图
5 结 论
1) 提出了基于TLGI技术的SVPWM新型控制系统用以解决PMSM传统直接转矩控制的转矩脉动问题,通过该方法可以有效提高SVPWM线性调制范围.
2) 通过对控制系统的Matlab/Simulink仿真,结果表明:基于TLGI技术的SVPWM控制方式可快速使得系统稳定,电动机转速较低时,转矩脉动仍然能保持在较低水平,改善了传统直接转矩控制电动机转速低时的转矩脉动问题.
3) 纯电动汽车电动机控制是一个复杂的控制系统,除电动机控制器参与电动机的实时控制外,电动机的选型需要通过对动力系统关键参数进行动力匹配,电动汽车的整车控制策略也参与决策电动机的工况.