基于自定义掩模和模板匹配的多指针识别与读数方法
2021-01-22张李轩李慧慧黄雪梅
张李轩, 闫 坤,2, 李慧慧, 黄雪梅
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林电子科技大学 卫星导航定位与位置服务国家地方联合工程研究中心,广西 桂林 541004)
随着计算机图像处理技术的发展,机器视觉已广泛进入各种生产、生活领域。机器视觉是指图像转换为数字形式并进行分析,从中提取可供后端使用的信息,它是人工智能的关键。目前,机器视觉被用在远程信息采集、实时监控及特种场所管理。2011年汉诺威工业博览会上正式推出的工业4.0将工业发展推向智能化时代,其中工业设备信息采集是自动化的基础。常用的工业设备信息采集包括:1)基于各种传感器的信息采集;2)基于机器视觉的信息采集。由于基于机器视觉的信息采集具有无需侵入设备内部、安装方便等优势,被工业界广泛认可。指针式仪表的识别是机器视觉在工业信息采集方面的一个典型应用,由于其结构简单、维护方便、成本低等优点,被广泛应用于压力、电压和电流等各种物理参数的信息采集。因为这项应用的潜力巨大,多个研究团队采用计算机图像处理技术设计指针式仪表的识别与读数算法[1-4]。
目前对于指针式仪表指针的识别与分类有很多算法研究成果。主要研究方向为单一指针识别算法,文献[5-8]提出的方法针对单一指针式仪表,可以解决光照因素引起的识别算法鲁棒性问题。多指针识别及读数的算法研究相对较少,李祖胜等[9]提出基于Hough变换的双指针机械仪表读数自动识别方法,能够估计双指针仪表读数,但使用Hough变换对仪表清晰度要求较高且计算量较大。另外Hough变换的指针识别和读数估计需利用直线特征,对于不具备直线特征的特殊形状指针,指针误检和漏检的概率将会上升。高建龙等[10]提出一种改进ORB和Hough变换的指针式仪表识读方法用于识别单一指针,满足了仪表读数的高精度要求,但该方法利用Hough变换提取仪表内的指针直线和刻度直线,会检测到表盘内的非指针线条,易受各类线条干扰,因此对表盘本身和表盘的拍摄环境的要求较高。崔行臣等[11]提出使用减影法获取指针读数,其通过减影获取指针与基准值之间的夹角,利用直线拟合得到指针精确位置,这种方法对减影后的指针完整度要求较高,且需要指针基准值才能完成指针识别读数。
针对上述问题,为了提供一种鲁棒性较高的多指针仪表识别与读数方法,利用细分掩膜选取区域的方法,搜寻表盘指针像素点峰值完成指针识别,然后估算多指针的读数。掩膜的设计可根据不同仪表调整,以适应多种工程需要。
1 指针识别与仪表读数
指针识别是多指针仪表的图像处理中重要的算法设计,不同指针可能对应不同物理意义、物理单位。因此,如何建立指针与其物理意义的对应关系,是实现指针读数的重要步骤。设计以下流程完成指针识别:仪表图像预处理,掩膜构造,指针检测,指针区域提取,指针模板匹配。完成指针识别后,可进行仪表读数,其流程主要包括局部指针搜索、指针读数估计。多指针仪表识别算法系统框图如图1所示。
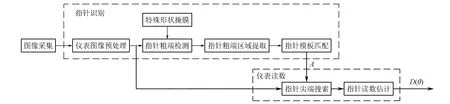
图1 多指针仪表识别系统框图
1.1 仪表图像预处理
为减少仪表识别过程的计算量和存储空间,将彩色图像转换为灰度图像;同时为更好地捕获特殊形状指针式仪表的指针特征,需对采集到的仪表图像预处理,从而得到指针特征清晰的仪表图像。
对采集到的仪表图像通过阈值分割的方法进行图像二值化处理,并将二值化后的图像归一化。二值化后图像g(x,y)为

(1)
其中:(x,y)为像素点坐标;f(x,y)为输入图像的灰度值;T为二值化处理设定的阈值,该阈值将指针所在区域二值化为白色。对图像设定合理的阈值可以突出有效信息,去除冗余信息。图像二值化处理常用的方法有:自适应中值滤波法、迭代法、最大熵阈值法、最大类间方差法等[12-15]。根据表盘的特性,为了得到较为理想的二值化图像,采用最大类间方差法[15-16]求二值化阈值,滤除了表盘的背景和表盘中的部分刻度与数字,保留了指针特征与表盘外延。
1.2 掩膜构造
掩膜的作用是提取指针可活动区域。掩膜对二值化处理后的多指针仪表图像进行剪裁,最终得到指针可活动区域图像,以减少计算复杂度。
以图2(a)仪表为例说明掩膜构造方法。假设仪表中心点(x0,y0)及表盘半径R已知(可采用人工标定方式预设或利用Hough变换确定),以该中心点为圆心构造掩膜,用以覆盖全部指针活动区。掩膜设计如图2(c)所示。掩膜设计步骤为:首先以仪表中心(x0,y0)和半径R-r构造圆形掩膜,令r=0.4R,R-r的长度的圆形掩膜以不覆盖刻度区域为标准。然后剪除一个内圆,内圆圆心为仪表中心(x0,y0),半径为R-ε,其中ε为剪除参数。为提高掩膜精度,对图2(a)仪表掩膜进一步优化。由于环状掩膜的部分区域无指针活动,可剪除该区域,该区域为环状底部,其展开的角度与位置对应于表盘指针无示数部分。
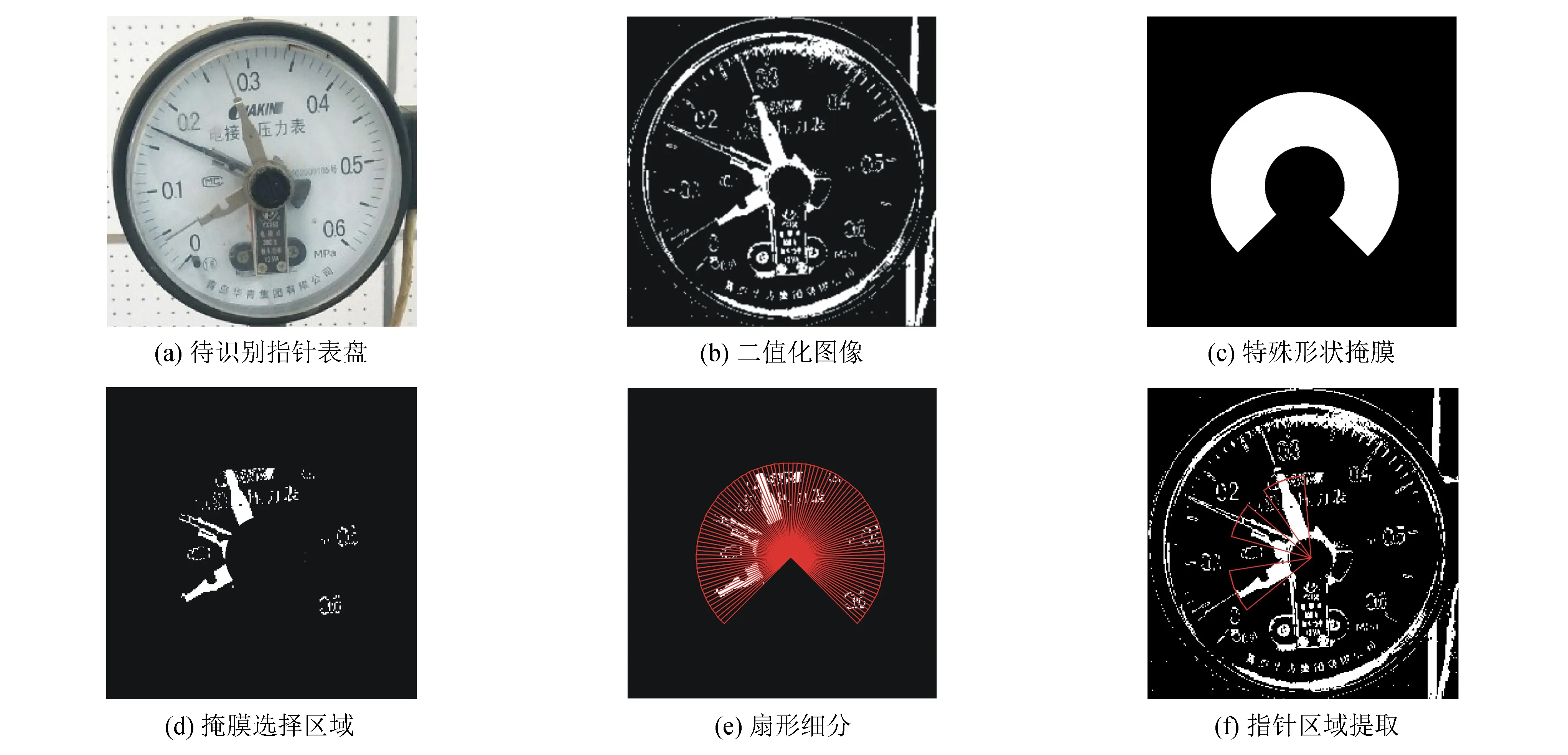
图2 指针粗端搜索过程
1.3 指针粗端检测
细分掩膜选取的仪表区域,利用指针与表盘间的色差特性搜索指针的位置。使用掩膜能够避免仪表其他区域对指针检测的影响,提高检测精度。对仪表的掩膜选择区域(图2(d))进行扇形细分,如图2(e)所示,并计算扇形细分图中每个小扇形所包含的白色像素点个数,即计算指针在每个扇形中所占面积。计算过程如下:
假设扇形细分个数(即小扇形个数)为N,首先确定扇形掩膜中每个小扇形的起始角度θ(i),
(2)
其中:θs为扇形掩膜展开的起始角度;θe为扇形掩膜展开的终止角度。计算扇形掩膜中第i个小扇形中白色像素点数的累加和k(i),
(3)
其中:rmin为在第i个扇形角度θ中的最小半径;rmax为在第i个扇形角度θ中的最大半径。r从rmin取值至rmax,相当于以圆心为原点建立极坐标系,r从最小半径rmin遍历到最大半径rmax,计算第i个θ中的白色像素点数,坐标(x0,y0)是图像表盘仪表圆的圆心点。

(4)
根据搜索条件可得估计指针角度集合,
A={a1,a2,…,aM},
(5)
其中:a为搜索条件下所估计指针角度;M为所估计指针数。
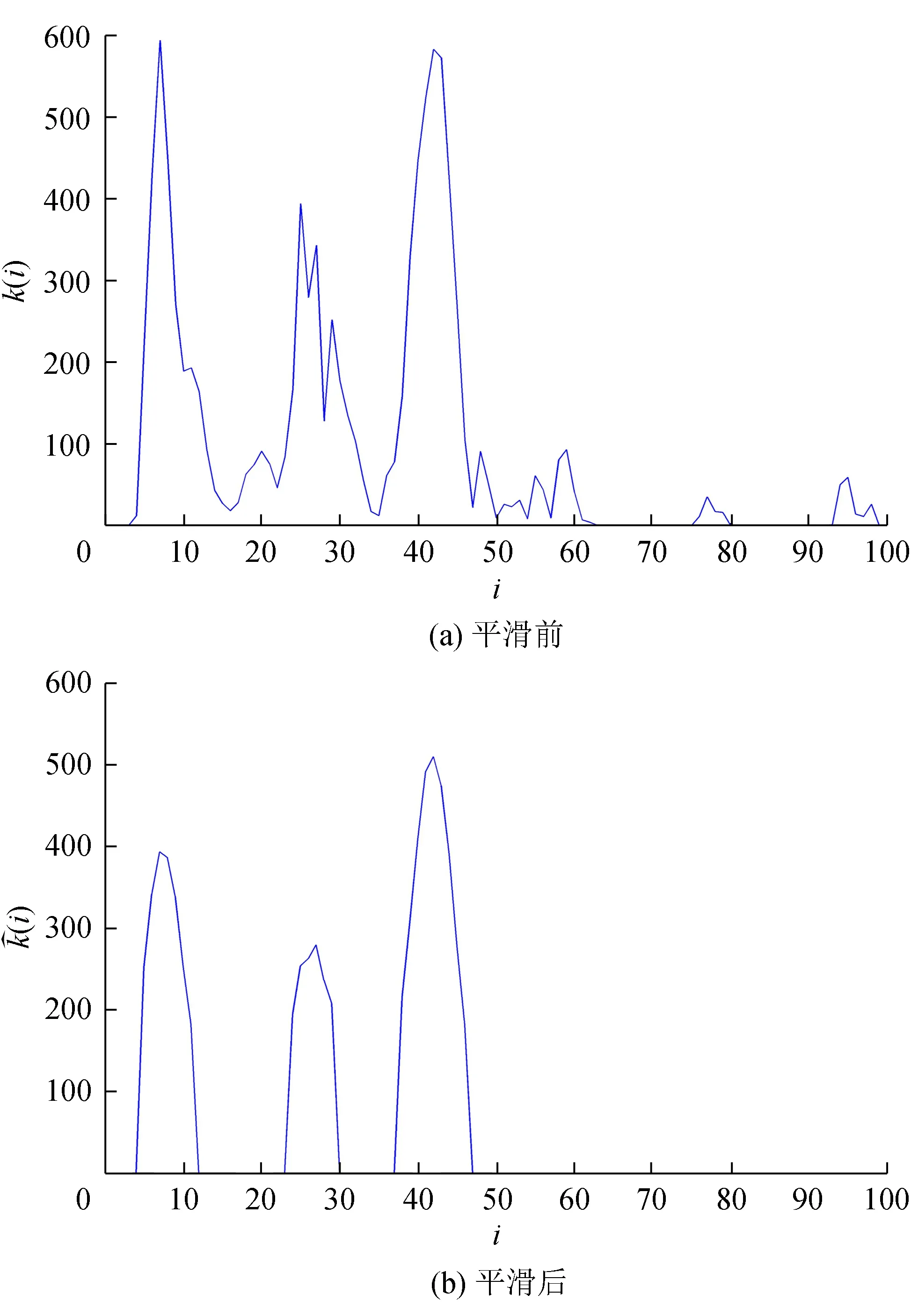
图3 指针粗端搜索结果
1.4 指针粗端区域提取

ωm={θ|am-ξ<θ (6) 其中ξ为邻域半径。工程实践中用平均值计算ξ, (7) 截取指针如图4所示。截取指针模板匹配过程首先将各个指针截取图归一化,与预设指针模板匹配并计算匹配度,然后通过匹配度高低识别指针,取匹配度最高的模板指针为其对应指针,并给每个模板设定编号值,以编号值代替模板来对应指针。指针截取图Π(m)判定方法为 (8) 其中:P(j)为第j个指针模板;X为识别出来的指针编号。指针识别部分完成指针检测和识别功能,从而可以建立指针与其物理意义的对应关系。 图4 指针粗端截取图 φm={θ|am-υ<θ (9) (10) (11) 其中:局部搜索半径区间为(R-r,R);H为最大白色像素点对应的θ值。取最大白色像素点数对应的θ值计算指针读数。 图5 指针尖端搜索过程 图6 指针尖端搜索结果 利用指针角度θ与仪表刻度的线性关系计算仪表的读数D(θ), D(θ)=θS/N±b, (12) 其中:S为仪表最大量程;b为校正参数,用来校正计算读数与实际读数的误差。因为在实际拍摄时,摄像机与待识别仪表很难做到完全平行,使得判别函数关系存在一定的非线性,这在一定程度上影响了算法的识别精度,设置校正参数b使读数估计值更加接近实际值。 在Matlab环境下,以电接点压力表为例,测试多指针仪表识别算法的效果。实验图像数据通过固定在冶金厂电接点压力表前的摄像装置获取,实验输入仪表图像,将计算值与人工判读值进行比较,以判断算法的准确性。由于仪表刻度精度不高,人工读数的实际值只取小数点后3位。采用2种方法对三指针仪表读取数据,计算2种方法对3个指针读数的绝对误差与相对误差,最终得出平均相对误差,其中算法实现的判别值即系统判别值。扇形细分法与Hough变换直线检测法测试结果见表1和表2。由于该仪表中的指针为缺口状,直线特征不强,且表盘干扰线条较多,直接对表盘使用Hough变换直线检测法会增大指针误检和漏检概率,甚至无法检测指针与读数,与本方法对比意义不大。该实验的Hough变换直线检测法测试结果以图5(c)指针尖端图为基础进行测试,以提高实验读数的准确性。 由表1和表2可知,扇形细分法平均相对误差为0.194 69%,在局部指针搜索步骤基础上的Hough变换直线检测法平均相对误差为0.361 09%,可见, 表1 扇形细分法测试结果 表2 在指针尖端搜索步骤基础上的Hough变换直线检测法测试结果 扇形细分法精度高于Hough变换直线检测法,且在局部指针搜索步骤基础上的Hough变换直线检测方法的读数平均相对误差也较低。此外,自动读数方法误差最大值比仪表盘固有精度小,算法准确性满足仪表读数要求,表明本方法自动识别读数的实用性、可靠性都较好。 多指针仪表识别算法取得了较好效果,扇形法检测指针可识别特殊形状的多指针式仪表,并且降低指针漏检概率。本方法的识别精度较高,有较高的鲁棒性,适用于各类均匀刻度表盘的指针识别与读数,如圆形表盘、圆弧形表盘等。因此,仪表读数方法是一种可行的方法,具有较好的应用前景。 对于精度要求高的仪表读数,如精密压力表,可增大扇形细分数,提高读数精度,以满足高精度仪表读数要求。今后将进一步优化算法性能,争取在提高识别精度的同时降低复杂度。1.5 指针模板匹配


1.6 指针尖端搜索


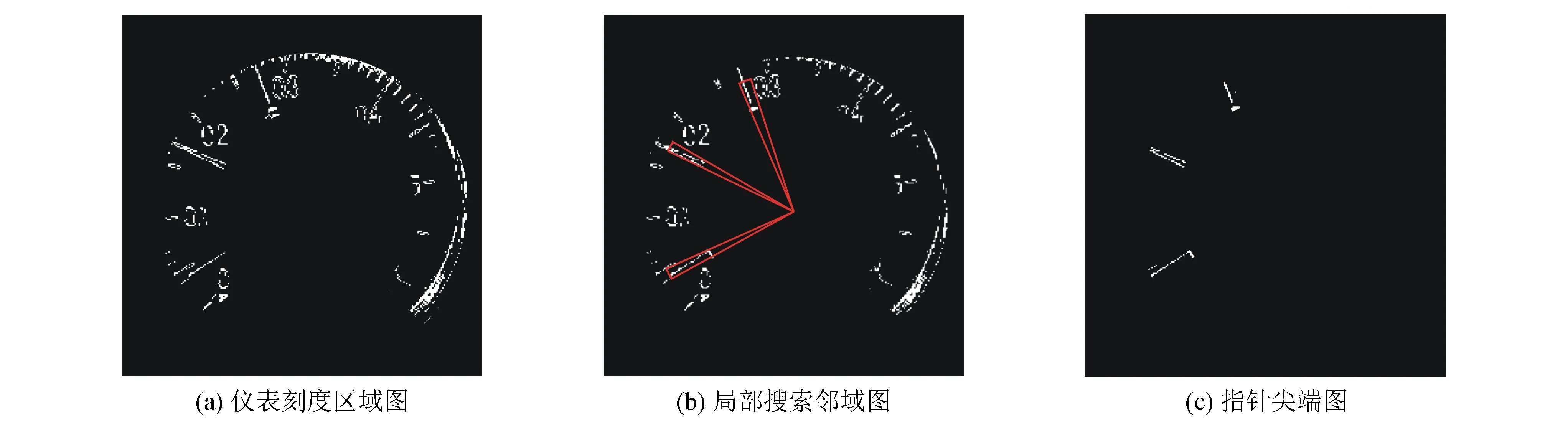
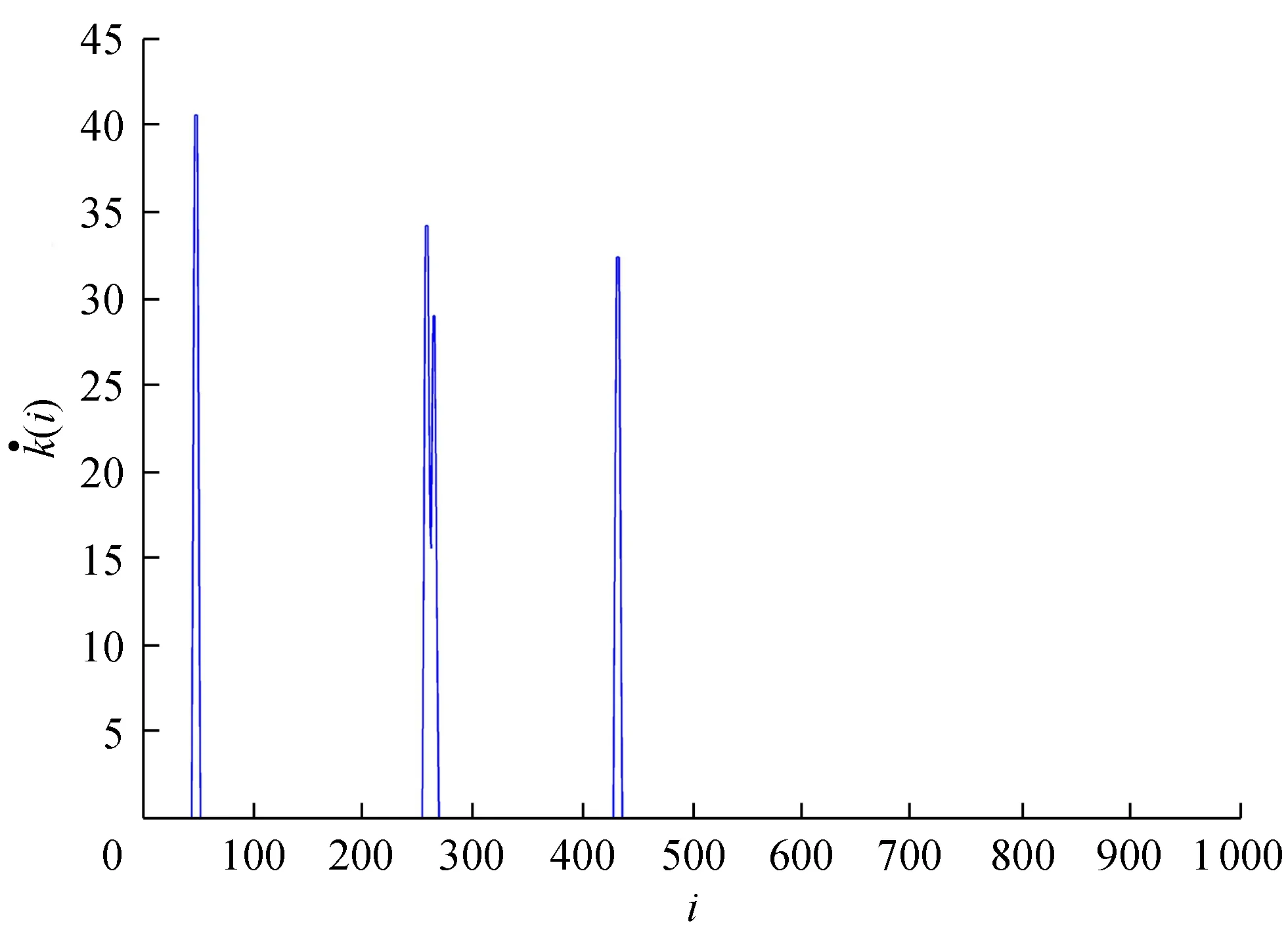
1.7 指针读数估计
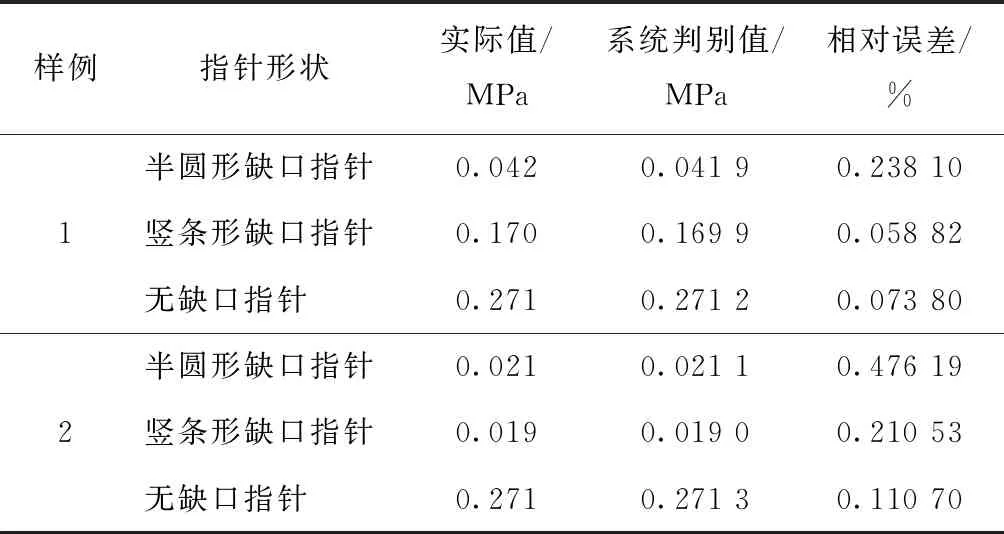
2 实验结果与分析

3 结束语
