基于SW-XGBoost的组合导航定位方法
2021-01-22刘丁柯胡晓丽古天龙宾辰忠
刘丁柯, 胡晓丽, 古天龙, 宾辰忠
(1.桂林电子科技大学 广西可信软件重点实验室,广西 桂林 541004;2.桂林电子科技大学 教学实践部,广西 桂林 541004)
随着辅助驾驶等车联网应用的快速发展,对车辆实时状态数据的获取和定位精度提出了越来越高的要求。单一的GPS/BD定位技术在城市高楼林立的地方很容易产生多径效应,或者在受到信号干扰的情况下导致卫星定位失锁。为此,融合多源信息的GPS/INS组合导航技术逐步成为主流[1],这种系统可以在GPS信号受干扰或中断期间,对INS误差进行估计和补偿,从而获得可靠、准确的导航解决方案,解决了独立使用GPS导航定位的局限性。
基于贝叶斯的组合导航技术有卡尔曼滤波(KF)[2]、扩展卡尔曼滤波(EKF)[3]和粒子滤波(PF)[4]等。其中,KF在高斯白噪声、理想的动力学模型、非线性误差线性化等方面存在不足。为了使KF适用于非线性系统,提出了EKF对非线性系统进行线性化,但线性化过程费时、复杂,容易导致滤波发散。PF采用一组随机粒子表示后验分布,克服了EKF中线性化模型的缺陷,但是这种表示法需要大量粒子,计算成本很高。
近年来,多层感知器(MLP)[5]、径向基函数(RBF)[6]、自适应神经模糊推理系统(ANFIS)[7]等机器学习的方法取得了较好进展。这些方法能够有效处理非线性的输入输出关系,其基本思想是在GPS可用时学习GPS和INS数据的输入输出关系,在GPS失锁时利用训练后的模型估计GPS中断时的导航参数,这样能够保证车辆定位连续性。但是在低成本的INS中,内部的惯性测量单元(IMU)存在漂移和转向误差,使建模的输入输出关系非常复杂,这导致了神经网络泛化能力的下降。随着机器学习研究的深入,出现了随机森林回归(RFR)[8-9]等使用集成学习对INS和GPS数据进行融合的方法[10]。RFR通过随机且有放回地从原始数据抽取子集构建多颗决策树,每棵树都在不剪枝的情况下沿着最好的特征完全生长,最终计算多棵树的预测均值作为输出,其使用袋外数据交叉验证的方法,能够提升模型的精度和处理复杂的输入输出关系的能力。
上述方法一定程度上能够在车辆位置预测中达到较高的精度,但由于车载传感器的固有误差和复杂的城市环境,不能同时处理上述环境中输入输出之间的线性模型和非线性模型,无法满足车辆位置预测高稳定性和高精度要求。为此,提出一种基于SW-XGBoost的组合导航定位方法,使用滑动窗口[11]来过滤和减少INS内部传感器存在漂移和转向误差,利用车辆历史状态与当前状态的关系,减少方向急剧变化导致的误差扩大;使用XGboost集成学习[12]的方法进一步降低噪点的影响,并对实际环境中缺失的数值做出一定的弥补,自动学习出特征的分裂方向;为了使模型能够对车辆状态特征有更加充分的学习,提高模型的预测精度,减少定位异常的情况,引入粒子群算法(PSO)[13]优化XGBoost模型的超参数。
1 数据集
数据采集设备如图1所示。该设备内置3个模块,即GPS模块、IMU模块和OBD模块。GPS模块可获得经度、纬度、速度和方向等车辆位置信息。IMU模块可获取车辆的加速度、角速度和角度等信息。OBD模块能够读取车辆的驾驶状态,从而获取车辆的运动信息,如速度、转向等。此外,设备还拥有GSM模块和eSIM卡,能够在车辆启动、GPS未搜到卫星或GPS失锁时,利用基站定位给出一个起始的坐标,为预测提供一个参考基准。

图1 数据采集设备
通过该数据采集设备,可以获得各种类型的数据信息,包括位置、车辆速度、转向、加速度、角速度和角度等,如表1所示。

表1 数据信息表
2 方法
在轨迹预测过程中,当前定位位置依赖于历史轨迹和当前的行车状态,并且随着时间增加,依赖关系逐渐减弱[14]。为此,采用滑动窗口收集最近一段时间的历史轨迹,为后续集成方法模型提供具有连贯性的数据输入,能够使模型充分学习车辆在行驶过程中特征向量的变化,进而对当前时刻的位置做出精确的预测。因此,设计了SW-XGBoost组合导航方法,该方法由训练和预测2个阶段组成。

图2 基于SW-XGBoost模型的组合导航系统模型
当GPS正常时,整个系统进入训练模式,其结构如图2(a)所示。通过IMU模块获得的三轴加速度、三轴陀螺仪、三轴角度和通过OBD模块获得输出的信息作为模型的输入量,而GPS模块定位的误差作为模型的输出量,实际输入x有n个样本,可表示为
x={(x1,y1),(x2,y2),…,(xi,yi),…(xn,yn)},
(1)
每个样本表示为
xi=[V,Φ,ω,a,φ],
其中:V为速度;Φ为方位角;ω为三轴角速度,a为三轴加速度;φ为三轴角度。yi=[ΔP],其中ΔP为位置误差。t时刻滑动窗口Wt为
Wt={[xt-s,xt-s+1,xt-s+2,…,xt-1,xt]T,
[yt-s,yt-s+1,yt-s+2,…,yt-1,yt]T},
(2)
其中:s为滑动窗口大小。随着时间的不断增加,窗口在时间序列上滑动,窗口长度保持不变,每次将窗口中距离当前时间最大的数据移除,同时将最近时间的数据添进窗口;每次输入XGBoost模型的数据随着时间不断更新。
模型使用包含k个回归树fk的集成模型预测输出值,
(3)
F为回归树的集合空间,
F={f(x)=wq(x)},q:Rm→T,w∈RT,
(4)
其中:q为每棵树结构;T为每棵树的叶子个数;f(x)为每颗树q和叶子权重w的函数。
为了减小集成树的误差,在XGBoost模型中使用目标函数
(5)

(6)
γ和λ分别为叶子树惩罚系数和叶子权重惩罚系数。
系统通过输入与输出变量之间的函数关系建立SW-XGBoost预测模型,拟合车辆信息、姿态数据等与定位误差间的映射关系。利用PSO[15]优化SW-XGBoost模型参数,包含参数max_depth、min_child_weight、gamma、 subsample、colsample_bytree。选定的PSO参数值如表2所示。

表2 PSO参数值
PSO的适应函数定义为均方根误差(RMSE),
(7)

参数的优化步骤为:
1)将待优化的参数作为粒子位置,随机初始化粒子的位置和速度。通过适应函数计算每个粒子的适应度,获取局部最优解Pj和全局最优解Gj。
2)每个粒子在搜索空间中飞行,更新粒子自身的速度,速度取决于局部最优解和全局最优解,
vj,θ+1=ωvj,θ+(c1r1(Pj,θ-xj,θ))+
(c2r2(Gj,θ-xj,θ)),vmin≤vj,θ≤vmax,
针对租房市场出现的乱象,多地监管部门采取了行动。7月份以来,已有北京、上海、深圳、南京和西安等20余个城市出台住房租赁新政,通过用地保障、增加房源投入、规范“租金贷”及其他住房租赁交易服务等举措,促进住房租赁市场健康发展。
(8)
其中:xj,θ为第j个粒子在第θ次迭代时的粒子的位置;vj,θ为第j个粒子在第θ次迭代时的速度;ω为惯性因子;r1和r2为区间[0,1]内的随机数。
3)粒子以新的速度在搜索空间中飞行,更新粒子自身的位置,
xj,θ+1=xj,θ+vj,θ+1,j=1,2,…,n。
(9)
4)计算每个粒子对应的适应度,更新Pj,θ、Gj,θ。
5)检查粒子搜索是否达到迭代次数或精度要求的条件。若是,停止搜索,输出模型参数;否则,返回步骤2)。
Wt={[xt-s,xt-s+1,xt-s+2,…,xt-1,xt]T,
(10)
选择合适的滑动窗口大小对提高模型的有效性和泛化能力至关重要。通过分析,车辆一个转弯的有效动作时间为10~15 s,滑动窗口包含车辆轨迹的时间小于转弯动作的时间最为可靠。为此通过对比实验验证分析,同时选取本方法的最佳滑动窗口大小。

图3 滑动窗口和RMSE的关系
3 实验与结果分析
3.1 实验
为了评价基于SW-XGBoost的车辆定位和轨迹预测方法的性能,使用安装数据采集设备的车辆在实际道路进行数据采集。图4为车辆行驶轨迹,其中GPS中断路段用实线表示。在整个路测过程中,选取不同的路况进行实验测试,测试路段分析如表3所示。

图4 车辆行驶轨迹

表3 测试路段分析
实验共采集5 000条数据。其中IMU模块设定采集数据频率为50 Hz,GPS模块和OBD模块设定的采集频率为1 Hz。假设GPS信号在这段时间内无法使用,进行轨迹预测。预测车辆位置的误差使用RMSE作为评价标准,将本方法(SW-XGB)与随机森林回归(RFR)、多层感知器神经网络(MLP)极限提升决策树(XGB)进行对比。
3.2 结果分析
图5为低速直线行驶路段(路段1)测试结果。从图5可看出,在GPS中断的前50 s内,车辆定位均获得了较好的预测效果,但在GPS中断的后半段有红绿灯和多次变道,车辆频繁加减速,导致4种方法预测误差在后半段明显增加。图6和图7分别为高速直线行驶(路段4)和钝角弯道行驶(路段5)测试结果。从图6、7可看出,上述2种路段与低速直行路段较为相似,道路转弯角度缓且小,车辆行驶状态稳定,因此SW-XGB、RFR和XGB这3种方法的预测精度差异不大,SW-XGB通过滑动窗口减缓误差逐步增大的趋势,因此预测误差最小,而MLP方法在上述路段的测试效果较差的原因是其初始权值和阈值具有随机性,导致每次计算结果不一致。

图5 低速直行路段测试结果
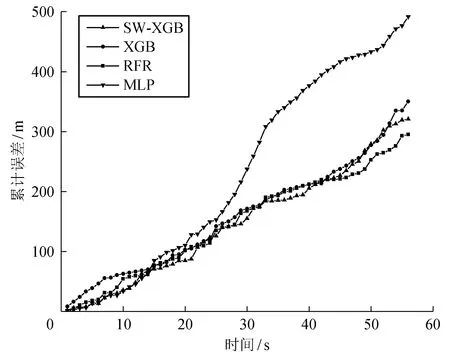
图6 高速直线路段测试结果

图7 钝角弯道路段测试结果
图8为交叉弯道路段(路段2)测试结果。GPS在这个测试路段出现88 s中断,进入此路段后有快速转弯。从图8可看出,在18 s左右车辆姿态的急剧变化会导致x、y方向的累积误差迅速增加。SW-XGB将历史数据作为下一次预测的输入,能够通过转弯这个过程逐步判断车辆动向,也能减少IMU中陀螺仪和加速度异常数值对预测结果的影响。而XGB无滑动窗口对历史数据平缓过程,导致预测精度也有一定漂移。因此,在较为急速转弯道路,SW-XGB一直能够拥有良好的性能。

图8 交叉弯道路段测试结果
图9为直角弯道路段(路段3)测试结果。从图9可看出,在20 s左右出现累积误差陡升,此时车辆正在直角转弯,抖动增加,对传感器干扰增大,传感器出现无效数据进而导致数据缺失,而XGB和SW-XGB相对于其他2种方法能够对缺失数据进行处理,自动学习分裂方向,因此预测效果也更好。

图9 直角弯道路段测试结果
5个路段测试结果如表4所示。从表4可看出:与XGB、RFR、MLP三种方法相比,SW-XGB方法在轨迹预测和车辆定位方面的RMSE值更小,预测轨迹更接近于实际参考轨迹。在低速直线阶段,SW-XGB方法精度相对于XGB提升35.56%;而在路况复杂的交叉弯道和直角弯道路段,4种方法累积误差均不断增大,但是SW-XGB方法仍优于其他3种方法,尤其在交叉弯道部分,相对与XGB、RFR和MLP三种方法,轨迹预测精度分别提升46.88%、48.78%和77.22%。

表4 4种方法测试路段的RMSE
4 结束语
SW-XGBoost车辆轨迹预测方法充分利用当前定位位置依赖于历史轨迹和当前的行车状态的关系,解决了实际路况中方向急剧变化和惯性器件噪声导致的误差扩大问题,避免了车辆位置预测的精度的快速下降,适用于辅助驾驶等车联网应用在城市环境中的情况。与单一的XGBoost预测方法相比,在不同情况路段环境下,定位精度都有明显的提升,对不同路况有更高的适应性和稳定性。