基于模型补偿的逆变器交流电压自抗扰控制
2021-01-21霍思敏徐宇新黄勇李武龙聂静
霍思敏,徐宇新,黄勇,李武龙,聂静
(1.国网湖南省电力有限公司,湖南 长沙 410007;2.北京中恒博瑞数字电力科技有限公司,北京 100085;3.国网重庆市电力公司,重庆 400014)
逆变器作为系统的能量转换核心,一直以来都是电力电子领域的研究热点[1-2]。然而,由于开关器件的非线性特征、死区、非线性/突变负载等因素的存在,传统控制下逆变器输出波形质量难以保证。
韩京清[3]教授提出了自抗扰控制(active disturbance rejection control,ADRC)算法,ADRC 模型依赖度低,控制精度高、响应快并且抗扰能力强。最早提出的非线性ADRC,存在算法复杂、参数众多、参数调节困难等问题,限制了非线性ADRC的广泛应用[4]。高志强[5]教授为此对其进行了线性化(linear ADRC,LADRC)改造,LADRC保留了传统非线性自抗扰算法的特有优势,将众多参数归结为观测器带宽和控制器带宽的整定,调参过程大为简化,大大提高了工程实用性[6-8]。
自抗扰技术在换流器控制领域引起了研究人员的兴趣,文献[7]提出了基于非线性ADRC的并联型有源滤波器电流内环控制策略;文献[8]在文献[7]的基础上,利用Lyapunov稳定性理论证明了控制系统的渐进稳定性;文献[9]设计了VSC直流电压外环一阶自抗扰控制器,构造了基于反正切函数的光滑非线性状态反馈函数,有助于控制器收敛速度的提升,控制力抖振问题得到了较好的解决;文献[10-11]研究了自抗扰控制在级联型STATCOM静止无功补偿器电流解耦控制、直流电压控制中的应用。
上述研究内容着重将自抗扰控制技术应用于系统某一环节,替换原来的比例积分调节器,鲜有研究从被控对象具体特征出发、系统地设计ADRC控制器。本文以逆变器三相交流电压为被控对象,基于d-q同步旋转坐标系,进行控制系统数学建模,根据被控对象阶数,设计二阶LADRC,基于滤波电感电流可测的特点,引入相应的模型补偿项以降低线性扩张观测器(lineay extended state obseyvey,LESO)的观测压力。基于频域法,对双环PI控制和LADRC控制的动、稳态性能进行了对比分析。通过实验对传统LADRC、模型补偿LADRC和双环PI控制进行了进一步对比验证。
1 三相逆变器建模
三相三电平逆变器结构如图1所示,r,L和C分别为滤波电感内阻、滤波电感及滤波电容;iLa,iLb,iLc为逆变器三相电感电流;ioa,iob,ioc为三相负载电流;Ua,Ub,Uc为逆变桥侧三相电压;Uoa,Uob,Uoc为输出电压。

图1 三相逆变器拓扑结构Fig.1 Structure of three phase inverter
由图1可知,基于派克变换,可得到三相逆变器在d-q同步旋转坐标系下的模型:

式中:Uod,Uoq为输出电压再d,q轴分量;iLd,iLq为LC滤波电流d,q轴分量;iod,ioq为负载电流d,q轴分量;Ud,Uq为逆变器侧电压d,q轴分量;Uod,Uoq分别为输出电压d,q轴分量;ω为系统基频;∇为微分算子d/dt。
三相逆变器是一个多变量、负载扰动剧烈的系统,并且在派克变换后的d-q旋转坐标系下,变量间存在强耦合。采用传统PI双环控制难以取得满意的控制精度和抗扰性能。
2 三相逆变器传统LADRC设计
LADRC控制器的整体结构如图2所示。

图2 LADRC控制器的整体结构Fig.2 Overall architecture of LADRC controller
图2中,三相逆变器为以电压Uod,Uoq为状态量的二阶系统,为此针对d,q轴分别设计一个二阶LADRC。在自抗扰体系下,d,q轴间耦合归结为扰动,此时d,q轴的LADRC结构一致,为简化分析,下文以d轴为例展开。
将式(1)中的总和扰动扩张作为新的状态,可得如下的状态方程:

式中:b0为控制增益;KPWM为逆变桥增益;u为控制量;x1,x2为系统状态变量,对应输出电压及其导数;x3为扩充的状态变量;f˙(y,y˙,v,w)为系统总扰动,简记为f;h为f的微分。
根据状态方程式(2),可建立如下三阶LESO:
状态误差反馈律LSEF设计为

式中:kp,kd为反馈率比例和微分项增益;u0为原始控制量;v为参考量输入。
参考高志强教授[5]提出的带宽参数调节理论,LESO和线性状态误差反馈(lineay state error feedback,LSEF)的参数可简化为

式中:ωc为控制器带宽;ωo为LESO带宽。
如此一来,LADRC调参问题便可归结为LESO带宽ωo和控制器带宽ωc的设计,降低了调参难度。
3 引入模型补偿的LADRC
作为LADRC的核心,LESO的扰动观测水平直接影响系统的抗扰能力。针对阶跃扰动,LESO可对状态量快速收敛。然而,当扰动较大时,LESO存在幅值和相位的跟踪偏差。
针对传统LESO对扰动的观测问题,基于被控对象的实际情况,引入已知建模动态,以降低LESO的扰动观测压力,保证估计精度。
考虑总和扰动式(3),将其改写为

其中

式中:f0为系统已知扰动项。
扩张状态观测器重构为

状态误差反馈律LSEF重新设计为

上述引入模型补偿的LADRC控制器能最大限度地利用已知建模动态,从而提高了系统的跟踪性能。
下面对LADRC控制下逆变器的跟踪性能进行分析。定义逆变器输出电压跟踪误差为:e=vy,结合式(2)和式(10),可得:
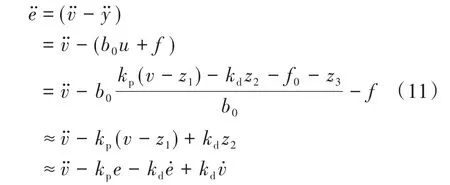
对式(11)进行拉氏变换,结合式(7),整理得:

由式(12)可见,所设计的LADRC控制器,对于给定参考信号为阶跃信号,系统的跟踪误差为零。考虑到论文是在d-q旋转坐标系下进行LADRC控制器设计的,参考信号为直流量,因此系统满足对参考信号的无差跟踪要求。
4 LADRC抗扰特性分析
4.1 模型补偿LADRC跟踪误差分析
抗扰能力是LADRC最为突出的特征,下面对其进行分析。
联立式(9)、式(10)可得:

其中

被控对象记:

联立式(13)和式(14),可得模型补偿LADRC等效控制框图如图3所示。
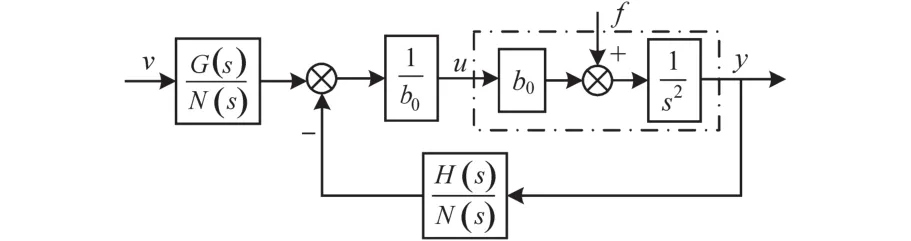
图3 模型补偿LADRC等效控制框图Fig.3 Equivalent control block diagram of model compensation based LADRC
根据图3可得模型补偿LADRC控制系统闭环传递函数为

可见,模型补偿LADRC系统输出y由参考信号跟踪项和扰动项构成,跟踪项主要由ωc决定,ωc越高,对参考信号的响应速度越快,但要考虑系统稳定性和噪声问题。扰动项取决于LESO的性能,模型补偿LADRC抗扰性能分析如图4所示,可见随着ωo增加,LESO扰动估计水平提高,相应的,系统抗扰能力也随之增强。

图4 模型补偿LADRC抗扰性能分析Fig.4 Analysis of disturbance rejection capability of LADRC with model compensation
4.2 LADRC与双环PI控制抗扰性能对比分析
三相逆变器的扰动主要来自于负载电流,如非线性负载、突变负载等,下面予以分析。
图5为三相逆变器模型补偿LADRC系统结构框图。由图5推导可得关于输出电压的传递函数为

式中:Uo为逆变器输出电压;Uref为电压参考值;io为负载电流;Gu(s)为Uref到Us传递函数;Zo(s)为io到Uo传递函数,具有阻抗性质。

图5 逆变器模型补偿LADRC系统结构框图Fig.5 System structure block diagram of model compensation based LADRC for inverter
根据文献[12],传统LADRC控制系统闭环传递函数如图6所示。

图6 逆变器传统LADRC系统结构框图Fig.6 System structure block diagram of conventional LADRC for inverter
图6中,GN(s)和HN(s)分别为
采用同样方法,可以得到三相逆变器传统LADRC系统关于输出电压传递函数:
图7为双环PI、传统LADRC以及模型补偿LADRC控制系统等效阻抗Zo(s)的频率特性曲线。

图7 逆变器扰动项等效阻抗频率特性Fig.7 Frequency characteristic of equivalent impedance of disturbance for inverter
图7中,在低频段,三者的幅频特性基本相同,在中低频段,模型补偿LADRC对应的幅频特性曲线始终位于双环PI以及传统LADRC对应的幅频特性曲线下方,即模型补偿LADRC对应Zo(s)幅值较双环PI及传统LADRC的要小,能更好地抑制来自负载的扰动;在高频段,两者的频率特性曲线相近,LESO对高频扰动估计能力有限。
5 实验分析
为验证本文所提基于模型补偿的LADRC策略优势,设计了以德州仪器公司的DSP28335芯片为控制核心的三相三电平逆变装置,装置经隔离变压器后供负载接入。隔离变压器连接组别为Δ-Y,二次侧中性线引出以供单相负载接入。从LESO扰动估计能力、带不平衡负载、带非线性整流负载、突变负载等方面对双环PI控制、传统LADRC以及模型补偿LADRC控制3种策略进行了对比实验。
系统参数如下:电感L=0.74 mH,采样步长50µs,电容C=20µF,直流电压660 V,寄生电阻r=0.1 Ω,Kpwm=0.176。控制器参数如下:电压环比例系数0.21,观测器带宽ωo=9 800,电压环积分系数710,控制带宽ωc=5 500,电流环比例系数38,增益b0=Kpwn/(LC)。图8为整流负载试验波形。
图8中,在单相整流负载下,双环PI控制、传统LADRC、模型补偿LADRC输出A相电压波形畸变率分别为4.12%,3.52%和2.15%。三相整流负载下,三种控制策略对应电压波形畸变率分别为4.53%,3.85%和2.34%。
图9为逆变器在负载突变时输出电流和电压波形。
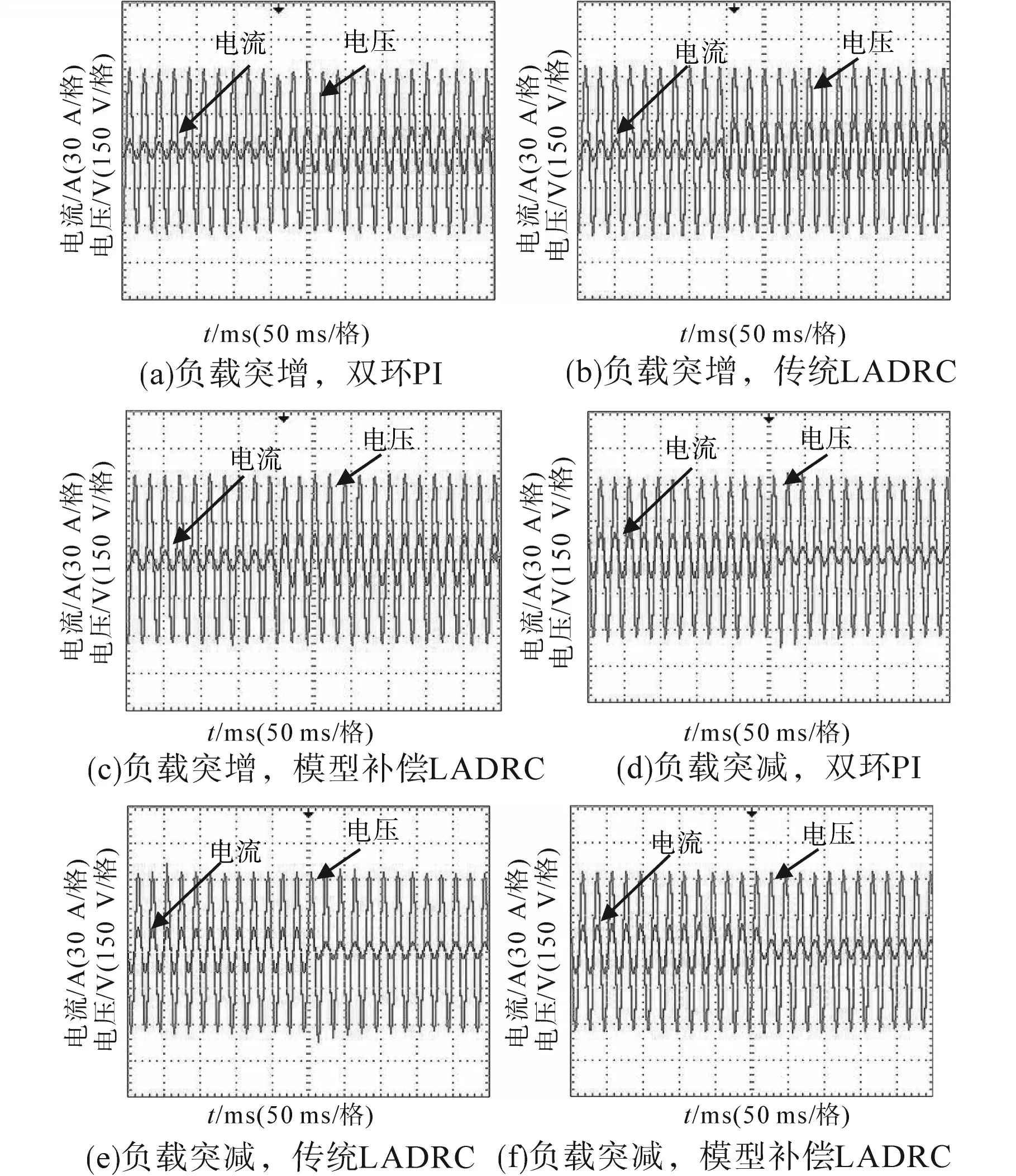
图9 逆变器在负载突变情况下输出电压、电流实验波形Fig.9 Voltage and current output experimental waveforms of inverter under condition of load mutation
图10为逆变器在负载突变情况下多种控制方式下电压有效值曲线。

图10 负载突变工况下逆变器电压有效值Fig.10 Voltages RMS of inverter under condition of load mutation
由图10可知,突增负载情况下,由20%增加到80%,此时三种策略对应的逆变器电压凹陷幅度分别为6.9 V,4.5 V及3.8 V,电压恢复时间分别为47 ms,35 ms及29 ms。突减负载情况下,由80%减到20%,此时三种策略电压超调分别为6.3 V,3.4V及2.7V,恢复时间分别为45ms,33ms及26ms。由上述的非线性负载和突变负载实验可见,LADRC的负载扰动抑制能力要强于双环PI控制。
6 结论
本文以三相逆变器为研究对象,设计了以交流输出电压为状态量的二阶线性自抗扰控制器(LADRC),基于频域法分析了LADRC的跟踪性能,引入模型补偿,以降低LESO的扰动观测压力,提高LADRC抗扰性能。
从非线性、不平衡、突变等不同负载工况对PI控制、常规LADRC和模型补偿LADRC三种算法进行了实验分析验证。相比双环PI控制,模型补偿LADRC受非线性整流负载影响更小,输出波形质量更高,电压跌落和电压恢复时间均优于双环PI控制,能较好地对负载突变扰动进行估计和补偿。
文中模型补偿LADRC需要额外的电流传感器,另外,模型补偿LADRC控制器参数ωo和ωc是通过实验调试得到,不一定是最优,如何对模型补偿LADRC控制器参数进行设计是接下来的一个研究方向。
