基于体育辅助运动机器人的神经元自适应PID控制的研究与分析*
2021-01-21苟小平张万军张景轩张景怡张景妍
苟小平,张万军,张 峰,张景轩,张景怡,张景妍
(1.陇东学院,甘肃庆阳745000;2.甘肃泽德电子技术有限公司,甘肃天水741003;3.兰州工业化设备有限公司,甘肃兰州730050;4.兰州大学 甘肃 兰州 730050)
1 问题的提出
目前,体育教学及体育训练主要以体力锻炼输出负载与体育教学的经验灌输为代价,存在体育锻炼及体育竞技运动周期长、损伤风险大,单一被动式体育训练及体育锻炼特征缺陷明显[1-2]。近年来已经有相关的技术应用到体育运动及体育康复锻炼的实际之中,有体育足球锻炼的机器人、打羽毛球的机器人、爬步机器人、体育教学及训练[3-8]的机器人。
体育辅助运动机器人的控制环节主要有无刷电机的PID控制[9-10]、交叉耦合控制[11-12]、自适应控制[13]等。甘肃泽德电子技术有限公司的教授级高工、高级经济师、博士张万军等人研究了一些模型辨识控制系统及交叉耦合控制[14-22]体育锻炼辅助机器人。
本文给出了一种基于体育辅助运动机器人的神经元自适应PID控制的算法,建立了一种基于体育辅助运动机器人的神经元自适应PID控制系统,利用MATLAB进行仿真。仿真结果表明:采用神经元自适应PID控制器的跟踪精度更高,相比于传统的PID控制,位置误差缩小了50%,引入扰动时,转速波动大幅降低,抗扰动能力明显提升。实验在陇东学院体育学院实验取得良好的效果;同时,在其它的地方体育的教学和训练具有较强的借鉴意义。
2 体育辅助运动机器人驱动部件的数学模型
为了克服PID控制算法的抗柔性能力较差、位置控制精度不高等问题,设计出了体育辅助运动机器人的速度模糊PID控制系统:

计算得到:

根据式(2)的形式,单神经元控制器中,输入层可以设为 5 个输入,分别是 e(k)、e(k-1)、e(k-2)、e(k)、u(k-1)、u(k),其中,e(k)为给定和反馈的误差值;输出层为u(k);权值为 ω1(k)、ω2(k)、ω3(k)控制器的输出为


在设计单神经元自适应PID控制器时,需要注意学习规则的选取、神经元比例系数的选取、学习率的选取等。
3 神经元自适应PID控制的设计
在攀爬建筑物的过程中,体育辅助运动机器人经常受到许多外部因素的影响,如乘客的姿势和体重的差异,以及运动训练机器人辅助机器人倾斜角的差异,参数已更改。PID控制器不能根据被控对象参数的变化进行相应的调整,控制效果往往很差。因此,在神经元自适应控制系统及PID控制系统,本文设计的神经元自适应PID控制器,结构图如图1所示。
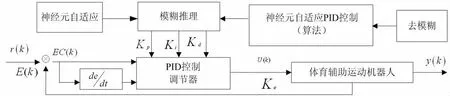
图1 模糊PID控制系统结构框图
4 仿真结果与实验分析
仿真条件参数设置如下:质量之和约为130kg,重力G为130N,转速设定为电机额定转速3000r/min,通过调节负载使原电机在目标转速下以额定功率驱动运行。所选BLDC电机极对ρn=4,定子电感Ld=La=30mH,定子电阻r=7Ω,电机转矩常数fm=0.12556(Nm/A),转动惯量 1.39×10-6(kg·m2)。
4.1 神经元自适应PID控制的影响因素分析
4.1.1 速度(稳定性)误差的问题分析
体育辅助运动机器人的神经元自适应PID控制的速度(稳定性)误差曲线,如图2~3所示。
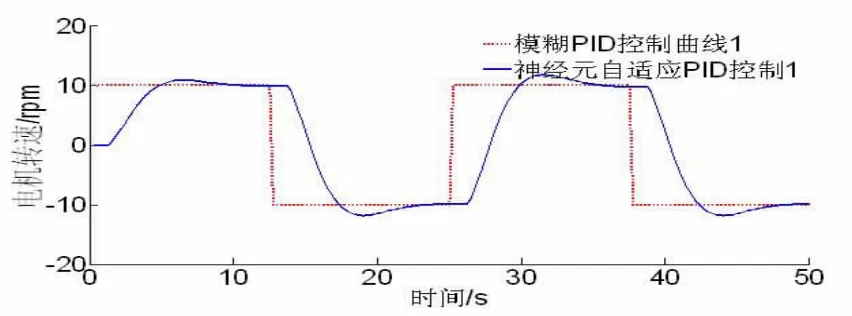
图2 速度(稳定性)误差曲线1
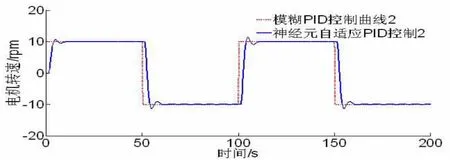
图3 速度(稳定性)误差曲线2
仿真结果表明:在体育辅助运动机器人速度控制系统中,模糊PID控制优于传统PID控制,误差小,稳定性和舒适性强。
4.1.2 跟踪精度(位置)误差的问题分析
体育辅助运动机器人的神经元自适应PID控制的跟踪精度(位置)误差曲线,如图4~5所示。
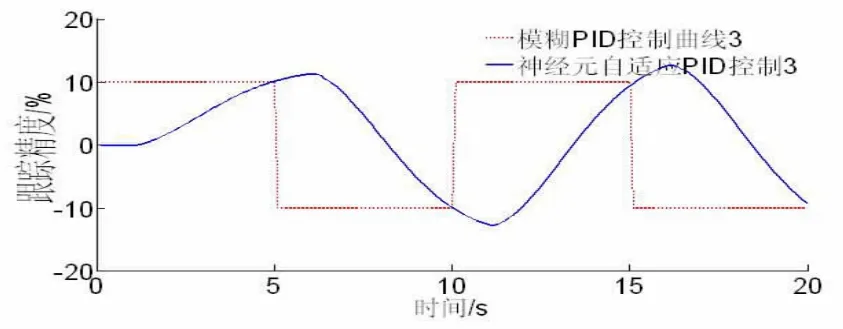
图4 跟踪精度(位置)误差曲线1
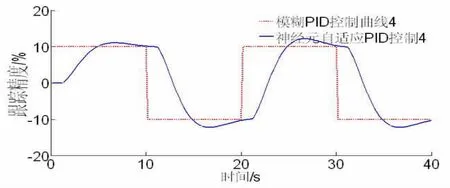
图5 跟踪精度(位置)误差曲线2
采用神经元自适应PID控制器的跟踪精度更高,相比于传统的PID控制,位置误差缩小了50%,引入扰动时,转速波动大幅降低,抗扰动能力明显提升。
4.2 实际测试实验
实验在陇东学院体育由苟小平副教授进行实验,实验数据的分析由甘肃省泽德电子技术有限公司的教授级高级工程师、高级经济师、博士张万军进行对照实验,说明对照组实验有非常显著性差异。体育辅助运动机器人的照片,如图6所示。

图6 体育辅助运动机器人的照片
符合实际教学和体育锻炼的需要,证明了体育辅助运动机器人在高校教学的可行性,在陇东学院体育学院实验取得良好的效果;同时,在其他的地方体育的教学和训练具有较强的借鉴意义。
5 结论
1)本文给出了一种基于体育辅助运动机器人的神经元自适应PID控制的算法,建立了一种基于体育辅助运动机器人的神经元自适应PID控制系统,利用MATLAB进行仿真。仿真结果表明:采用神经元自适应PID控制器的跟踪精度更高,相比于传统的PID控制,位置误差缩小了50%,引入扰动时,转速波动大幅降低,抗扰动能力明显提升。
2)实验在陇东学院体育学院实验取得良好的效果;同时,在其他的地方体育的教学和训练具有较强的借鉴意义。
