面向自动驾驶技术的公路设计发展方向探索
2021-01-21王强
王强
(重庆交通大学,重庆400074)
道路是为车辆提供物理的行驶平台,车辆的行驶特性决定了道路的功能类型。在如今人工智能如火如荼的发展前景下,自动驾驶智能汽车也终将实现量产,那么从现有公路到自动驾驶汽车所需的路型,其设计技术标准又将发生怎样的变化,这值得公路设计者深入思考。
1 弯道半径
1.1 弯道半径取值
弯道半径取值决定因素主要有:行车横向稳定性、行车的滑动稳定性、乘客的舒适性、营运经济性。现行规范《公路路线设计规范》[1](JTGD20-2017)对弯道最小半径取值作出了规定。
1.2 自动驾驶车辆过弯相关技术
为保证汽车能够安全转弯,需要对汽车的横向力系数(G值)进行限制[2],横向G 值表示汽车在不发生侧滑的情况下,车辆的速度和弯道角度之间的关系值,即汽车在以某个车速改变方向时所承受的离心力极限。若汽车在转向时突破了所承受的最大G 值,可能会出现推头、甩尾、侧滑等一系列危险。在高速公路转弯处,G 值会随着车速和弯道角度的变化而变化。而目前自动驾驶车辆在弯道上还无法根据弯道角度的改变而及时实施变速行驶,只能以一个定值速度行驶。
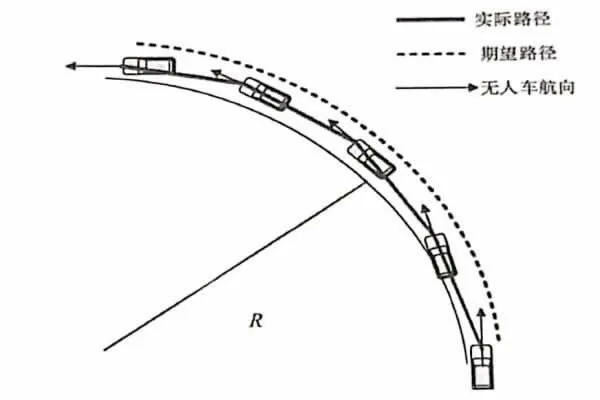
图1 自动驾驶车辆过弯过程示意图
自动驾驶车辆在弯道行驶时,需要预设一条与弯道半径曲率大致相同的曲线路径,其行驶航向是不断变化的,因此需要在弯道路径上选取较多的点保证预设路径尽可能接近于道路曲线,这就会造成两点之间的距离较小,此时自动驾驶车辆的过弯路径如图1 所示,路径是由一段一段长度比较小的折线组成。一旦自动驾驶车辆航向偏差超过限幅,就需要进行迅速的调整,在车速比较大的情况下这种控制方式会造成车身摆动频繁过弯耗时较长,乘客的乘坐体验也比较差。
1.3 自动驾驶技术对弯道半径的影响
当公路或匝道曲率过大、半径过小时,自动驾驶车辆无法在短时间内做出安全的大转弯动作。依据调研,长安汽车自动驾驶车辆前向识别距离为150~200m、左右为30m 以内(一般情况下为20m)、后向为50~60m,可知自动驾驶的传感器对前方的探测距离比左右和后方的探测距离远。这是因为传感的探测范围大概是一个以车为中心的定值的圆,车辆所在道路的半径越大,覆盖的道路路径越长,半径越小则覆盖的路径越短,因此目前出于安全考虑,在高速公路上需要对自动驾驶汽车方向盘的转角做限制,从而限制自动驾驶汽车的最大转弯角度,也是为了防止系统出现计算错误,避免高速公路急转向而侧翻的情况。
高速公路弯道半径是按照设计速度定的,不同的设计速度下弯道半径一般值与极限值是不同的[3]。以设计速度80km/h 为例,弯道半径一般值为400m,极限值为220m(最大超高值为10%时),但弯道半径在设计时应考虑停车视距的要求,且视距要求为强制性指标。当考虑视距要求时,对于设计速度为80km/h 的弯道半径,设计方给出的建议是大于650m,但当受地形限制时,也可以考虑小于650m 的弯道半径,且需采取内侧加宽等措施来达到视距的要求,除此之外还要结合经济性综合考虑弯道半径的取值。从表1 可知,高速公路上,弯道设计的停车视距要求最小为110m,大于自动驾驶车辆目前在高速路弯道的探测距离(100m),由此可见,自动驾驶车辆的普及有可能改变弯道设计时的半径推荐值。

表1 高速公路、一级公路停车视距
2 设计速度
2.1 设计速度概念
20 世纪50 年代,我国引入设计速度的概念作为道路路线设计的基础技术指标,设计速度曾被称之为计算行车速度,《公路工程技术标准》[4](JTGB01-2003)。改称为设计速度。设计速度是一个设定值,通常作为通用基础技术参数用于制定一条道路的设计标准,是控制公路几何线形、视距、超高、加宽等设计要素标准的核心指标。一条公路的设计车速确定后,相应的最小圆曲线半径、超高、最大纵坡、坡长等指标随之确定。
在我国目前的公路线形设计中,不论是高速公路还是地方低等级公路采用是设计速度理念,而设计速度的理念中存在着以下不足[5]:(1)设计要素可能采用最低指标;(2)前后线形指标的一致性和均衡性差;(3)与车辆实际行驶特性不符。
2.2 自动驾驶技术对设计速度的影响
据资料,德国高速公路不限速,意大利高速公路最高限速为150km/h,我国高速公路最高限速为120km/h。而自动驾驶的车辆由于不存在人为操作因素的影响,并能够通过车辆自身的车载电脑、GPS、车载黑匣子等设备与道路雷达测速仪、道路通信基站的互联互通,达到自行调节速度的作用。从高速公路设计实践和运行管理的情况分析[6],采用设计速度作为限制速度将可能出现不合理的情况。高速公路路况复杂,车型多样,不同的天气也会导致公路运行条件发生变化。用自动驾驶技术可以使得车辆在道路上行驶时,速度始终保持在设计速度允许的偏差范围内。这样,设计速度的制定与计算方式会发生一定的变化。另外,通过对我国自动驾驶政策上的解读可知,我国政策层面上主推的是自主式智能驾驶与网联式协同驾驶的融合发展。因此可以预见,在未来自动驾驶技术与车联网体系足够完善之时,我国高速公路的最高限速亦将会随之改变。
3 隧道出入口净距
3.1 隧道出入口的明暗适应
《公路路线设计规范》[1](JTG D20-2017)对互通式立体交叉及其他设施与隧道之间的距离作出了要求。
由于隧道是一个半封闭的环境,隧道的进出口路段相对于开阔的公路而言,有着完全不一样的行车环境,研究表明,由人- 车- 环组成的系统中,人是整个系统中最为重要的部分[7]。而根据统计,眼睛占各种感觉器官给驾驶员提供信息比例的80%,可见对于驾驶员而言,视觉特性对行车安全有着重要的影响。
在视觉特征中,视觉适应是视觉特征的重要部分。视觉适应分为“暗适应”和“明适应”[8]。“暗适应”是指人从亮的地方进入黑暗处时,人的瞳孔放大,视觉感受提高的过程,该过程持续时间为3-6 分钟。当车辆驶入隧道时,视觉上产生暗适应,由于在隧道外看不到出口,进入隧道就像进入了一个黑洞,会不由自主的产生紧张、焦虑的感觉,引发驾驶不适,这就是“黑洞效应”。而“明适应”的过程则相反,但相对于“暗适应”来说适应较快,一般1 分钟之内可恢复正常视力。
在隧道行车中,“明适应”和“暗适应”所带来的“黑洞效应”和“白洞效应”都会使驾驶员出现短暂的视觉障碍。隧道内部行车环境单调乏味,空间封闭性较强,视野范围相对狭小,而车辆的运行速度较高,这会降低驾驶人对环境信息的正确感知,一旦发生紧急状况,驾驶员将难以在有限的时间内作出正确的判断,所以隧道进出口成为事故多发路段。
但是,如果采用智能驾驶技术,就不存在视觉的明暗适应过程,大大提高了行车的安全性,降低了事故的发生。
3.2 隧道出入口净距与自动驾驶
现行规范《公路路线设计规范》(JTG D20-2017)中对于隧道与前方主线出口之间最小净距的要求是以考虑车辆出隧道后驶离主线的运行过程所需要的最小距离,该过程包括驾驶人明适应、寻找间隙、变换车道和出口确认等;主线入口与隧道之间的最小净距考虑的是刚驶入主线的车辆在进入隧道前的安全准备距离,包括车辆驶入主线后调整车速和位置等所需要的最小距离。
随着我国山区高速公路的发展,隧道与前方主线出口之间的净距普遍偏小的情况越来越多,因此需要增加完善的交通组织、管理和运行安全保障措施等,势必增加工程造价。而自动驾驶汽车在反应速度上、明适应能力上均明显不同于人类驾驶员,因此自动驾驶有可能改变净距要求,达到节省土工规模,节约工程造价的效果。
4 结论
自动驾驶作为一项多学科综合发展的新兴技术,它的出现和发展必将对传统道路的设计带来变化,从而推动交通行业朝着智慧、快速、安全等方向发展。本文选取了对道路设计影响较大的三个控制因素,并总结出自动驾驶的出现对其产生的影响。从道路设计者的角度可以看出,道路设计要与自动驾驶相匹配还有很长一段路要走。