GEO 卫星单自由度太阳电池阵效能分析
2021-01-21贺景瑞刘壮壮
李 畅 贺景瑞 李 懋 赖 鹏 刘壮壮
(中国人民解放军63795 部队,北京100089)
1 概述
太阳电池阵是卫星主要能量来源,其工作效能对卫星在轨健康运行具有重要意义[1]。早在1958 年,美国“先锋1 号”卫星便开始应用电池阵向航天器供电。目前绝大部分卫星电源系统采用太阳电池阵- 蓄电池组方式,具有在轨寿命长、可靠性高和供电效率稳定等优势[2-3]。
太阳电池阵工作原理为光电转换,即将太阳光能量转换为电能。其工作效能受多方面因素影响,主要包括有效面积、转换效率、日卫距离、工作温度、阳光入射角度、衰减度、定向模式等。功率计算公式[4]如下:

其中U 表示工作电压,正常工作时保持恒定;F 表示功率系数,与电池阵本体材料有关,转换效率越高则该系数值越大;η1表示衰减因子,取决于元器件老化程度;η2表示地影、月影时期电池阵无法正常工作影响因子;η3表示距离因素,距离越近则太阳光辐射强度越大;I0表示电池阵使用初期在适宜温度(25℃)下、阳光直射阵面时输出电流;γ 为电流温度系数;T 表示电池阵工作温度,与卫星所处轨道位置相关;θ 为太阳光入射矢量与电池阵法向矢量夹角。
在原材料、制造工艺等设计固定的前提下,本文选择阳光入射角度、日卫距离、可靠性等三个影响因素,开展GEO 轨道卫星电池阵工作效能分析评估。
2 固定模式效能分析
作为全部能量来源,太阳光对电池阵工作效能重要性不言而喻。通过公式(1)可知,在其它参数固定情况下,电池阵发电功率与阳光入射角θ 的余弦值呈正相关,即阳光直射效果优于斜射。

图1 阳光入射角度
对于GEO 轨道卫星而言,太阳光入射角主要受两个因素约束。一个是太阳俯仰角α,是由于地球绕太阳周年运动,太阳至地心连线与赤道面的夹角;另一个是太阳方位角β,主要因为GEO 卫星随地球自转,与日- 地连线在赤道面上形成的夹角[5]。如图1 所示。
基于图1 建立坐标系,设Oe地地心为坐标系原点,Xe轴指向0 时卫星位置,Ze轴指沿原点垂直于卫星运动平面(即地球赤道),Ye轴与Xe轴、Ze轴成右手系。在此坐标系下,太阳光矢量L 和电池阵法线矢量Φ 分别为:

在固定模式下,卫星及载荷保持对地定向,电池阵同样保持固定角度不变。根据太阳光矢量和电池阵法线矢量空间关系,可知θ 与α、β 计算方法如公式(3)。

其中太阳俯仰角α 和方位角β 简易计算方法,如公式4。

在得到全年θ 值后,为充分比较固定及单自由度下的电池阵工作效能,定义效能比σ 为:该模式下平均功率与理想模式下功率之比,计算公式见公式(4)。σ 能够在不涉及具体数值计算的情况下,完整地表述该模式电池阵工作效能。其中理想模式下阳光直射,即θ0取90°、S0取RL-RΦ。简化后,能效比的数值等于太阳光入射角θ 余弦值与距离因子之比。

计算全年固定模式效能比,按月份统计如表1 所示。
由表可知,固定模式各月效能值均在0.3 上下波动,全年效能值不足理想模式下的1/3。
可见固定模式对太阳光的利用率相当有限,若由电池阵面积来做余量将得不偿失。
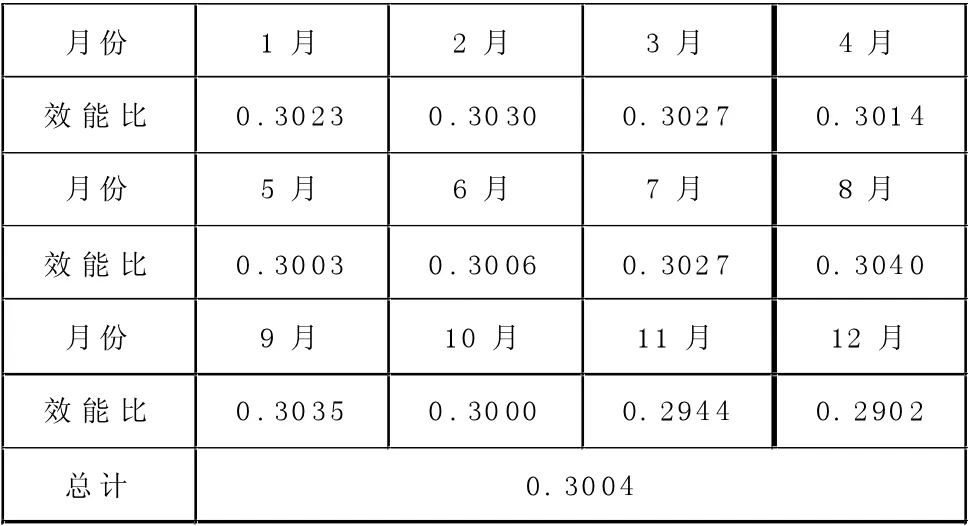
表1 固定模式全年效能比
3 单自由度效能分析
为克服固定模式下电池阵效能低下的缺陷,单自由度驱动电池阵技术应运而生。目前,单自由度电池阵已应用于大部分卫星,其有效性已经得到了理论和实际检验。一般情况下,单自由度电池阵增加了驱动装置和控制系统。前者主要通过机械结构使电池阵在设定自由度内以一定速率转动,以保持对太阳光的高效接收;后者结合星载太阳敏感器,视设计实时捕获度量太阳光或周期性修正[6]。
对于GEO 卫星而言,单自由度模式主要弥补变化速度和范围较大的太阳方位角所带来的能量损失。而对于变化范围较小的太阳俯仰角(即太阳高度角)来说,其变化范围仅为±23°27′[7],所造成的能量损失相当小。
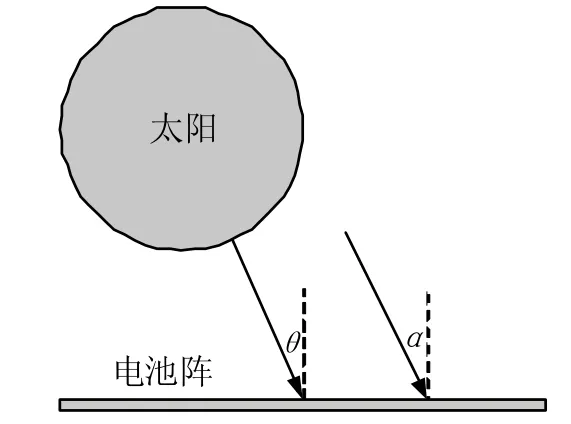
图2 单自由度下阳光入射
如图2 所示,电池阵在单自由度模式下已经实现太阳方位角为0°,在此维度获得最佳值。则太阳光入射角仅由太阳高度角决定,即θ=α。则效能比计算公式可简化为:

计算全年单自由度模式下效能比,按月份统计如表2 所示。

表2 单自由度全年效能比
从数据来看,单自由度下电池阵效能比有了明显提升,单月效能比均在0.91 以上,尤其是在春秋分所在月份(如3 月、9月)效能比可进一步达到0.986 左右。全年效能比为0.9487,即在单自由度下能量损耗率仅为5.13%,完全可以通过增加电池阵面积方式来补偿。单自由度与固定模式效能比对比如下图所示,可见增加单自由度对效能比提升巨大。

图3 单自由度与固定模式效能比
4 可靠性分析
通过增加卫星轨道面法向单自由度的方式,卫星电池阵的工作效能的得到了大幅度提高,但同时也会带来一些可靠性方面的问题。首先,自由度需要增加对应机械结构实现,如电驱动装置、导电滑环、控制单元等,这些装置会引起系统可靠性降低[8];其次,控制结构周期性摆动会对卫星姿态稳定造成一定影响,尤其是对一些定位精度要求较高的载荷;另外,电池阵对日定向会导致太阳光压摄动增加,这同样会影响卫星轨道位置保持精度。
出于上述考虑,选定定向驱动装置作为可靠性分析因素,设其平均无故障工作时长为MTBF,平均故障修复时间为MTTR,可计算驱动装置可靠率λ 为:

当故障服从随机分布时,单个装置故障率为e-(1-λ)t,其中t为工作时长[9]。假定两个电池阵驱动装置制造工艺相同,则二者可靠率和故障率均相等。在此基础上,可计算卫星电池阵正常工作概率p0、单板故障概率p1和双板故障概率p2,如公式(8)。
设定参数MTBF 为87600 小时、MTTR 为1 小时,卫星工作寿命为10 年,对其电池阵自由度可靠性进行仿真,结果如图4所示。

图4 可靠性仿真结果
由仿真结果可知,卫星寿命初期,电池阵自由度可靠性正常工作概率呈快速下降趋势,单板故障概率则呈快速上升趋势。卫星在轨后半段,正常工作概率已低至40%以下,可见维持其高可靠性难度较大。
5 结论
5.1 对于GEO 卫星而言,增加电池阵太阳方位角单自由度可以大幅度提升工作效能,全年效能比由0.305 提升至0.959,提升率为214.43%。可见单自由度能够满足效能和面积的双重考虑,已无必要增加至双自由度。
5.2 增加双电池板自由度意味着可靠性降低,在单个平均无故障工作时长为87600 小时(即10 年,等于卫星寿命)的情况下,卫星在轨后半段正常工作概率仅为36.79%。
5.3 提高卫星可靠性的根本方法是降低机构故障率,在平均无故障工作时长固定情况下,减少故障修复时间方式同样有效,见下表。

表3 不同MTTR 对p0 影响