行星齿轮传动比速度瞬心计算法研究*
2021-01-20姜雨田刘长安
刘 营, 姜雨田, 刘长安
(山推工程机械股份有限公司,山东 济宁 272073)
0 前言
行星齿轮传动是一种普遍采用的传动形式, 它具有体积小、传动比大、可靠性高等优点,在齿轮变速箱中应用广泛[1-2]。 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用, 对行星齿轮传动的计算和分析成为工程机械传动设计过程中的重要环节, 而行星齿轮的传动比选取计算是行星齿轮的设计过程极为重要的一步[3]。
对行星齿轮的传动运动分析主要有机构转化法、速度图解法等[4]。 机构转化法是根据相对运动的原理,在整个行星齿轮系统上附加一个与行星架等大相反的转速,从而使复杂的两自由度的齿轮运动问题转化为齿轮的定轴转动问题,该方法计算过程简洁明快,但是比较抽象,越过了行星轮的个体运动,将之简化为一个惰轮处理,对于了解行星齿轮传动的运动过程,没有说明。 速度图解法较为直观,各个构件的运动情况都有指示。 但速度图解法过程相对较为繁琐[5]。
速度瞬心法是机械行业用于机构速度分析的一个重要方法, 该方法能够简捷直观地分析机构中某个或某几个位置的运动特性[6]。 本文尝试引入平面机构运动分析中常用到的速度瞬心法,以标准渐开线直齿轮为对象,通过分析计算求解行星齿轮的传动比。
1 方法设计
在如图1 所示的行星齿轮中,太阳轮、行星轮、齿圈的齿数分别为Zt、Zx、Zq;太阳轮、行星轮、齿圈、行星架的转速分别为Nt、Nx、Nq、Nj。 此行星齿轮的特性参数为α,且图1 中给出了三者的节圆(分度圆)以及各齿轮的转动方向。
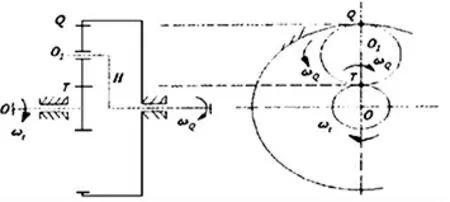
图1 行星齿轮传动图
行星轮在T 点与太阳轮相啮合,故此处Vxt=Vtt(Vxt、Vtt 分别为行星轮、太阳轮上T 点的速度);行星轮在Q 点与齿圈相啮合,故在Q 点处有Vxq=Vqq(Vxq、Vqq 分别为行星轮、齿圈上Q 点的速度)。 行星轮作为平面运动的刚体,在已知其上两点的绝对速度的情况下,可以求得其速度瞬心,进而计算出其分度圆圆心位置,即行星架与行星轮的接触点的速度。 下面对行星轮速度瞬心的位置进行求解。
如图2 所示,设行星轮的速度瞬心为J 点,连接EJ、JA两条线段。 则相对于速度瞬心J,Q 点的角速度可表示为:
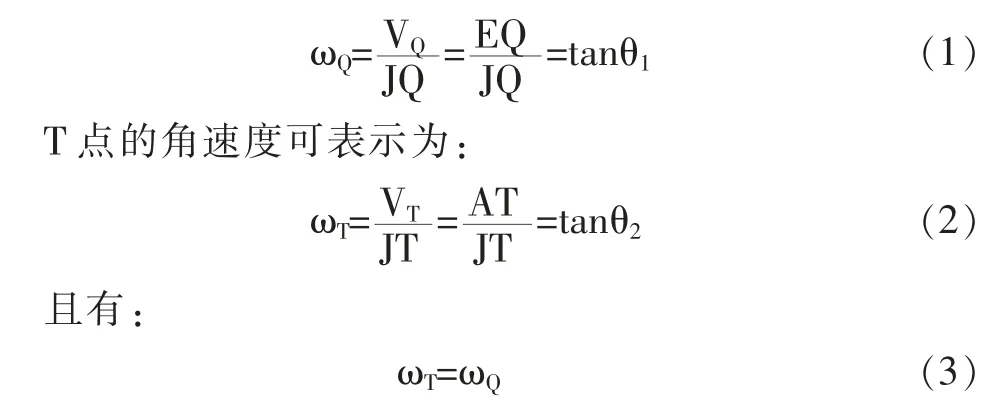
其中:ωT、ωQ分别为行星轮上T、Q 两点的角速度。

图2 行星轮速度瞬心位置示意图
根据(1)(2)(3)式可得:tanθ1=tanθ2,θ1=θ2,即:E、J、A三点共线。 此时行星齿轮中心位置O1点的瞬时线速度VO1即为行星架上O1点的瞬时线速度,则行星架的旋转角速度具体的求解过程表述如下:

图3 行星架旋转角速度示意图
如图3 所示,过O1做线段O1C,用O1C 表示O1的瞬时线速度,即:
参考图3 几何关系,由(7)式可知,C 点应在线段AE上。过点Q 做AE 的平行线交TA 延长线于B 点,延长O1C交BQ 于D 点。 四边形CDQE、ABDC、ABQE 均为平行四边形,则:
式中:ωT'、ωQ'分别表示太阳轮、齿圈的转动角速度。 对于行星架上O1点:
式中:ωO1'为行星架上O1点的转动角速度。 联立方程(11)(12)得到:
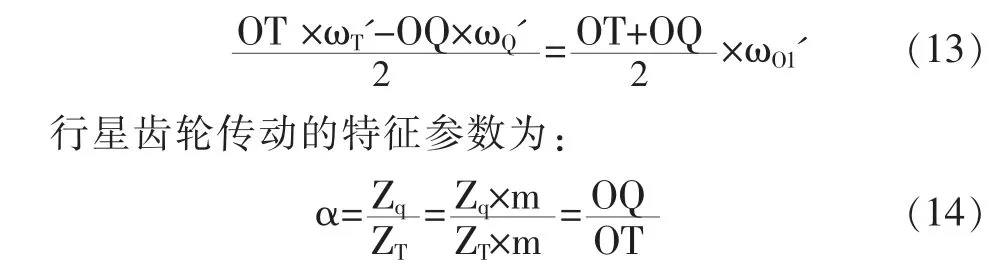
将式(14)代入方程(13)中,整理得到:ωT'-αωQ'-(1+α)ωO1'=0,即:

式(15)与采用机构转化求解法得出的关系式一致。
2 方法分析
因为推理的需要,本文对行星轮的速度瞬心做了必要的证明,过程略显冗长,在实际应用过程中可以直接应用上述的计算推导结果,包括:
1) 在图2 中连接TQ 与OO1的交点即为行星轮的速度瞬心。
2) 在图3 中过点O1做OO1的垂线且与TQ 的交点C,O1C 即为O1点的速度矢量。
行星齿轮传动的平面自由度为:4×3-2×4-2=2,即行星齿轮传动需要有两个确定的速度输入,才能有唯一的速度输出,该方法本质上是利用了这一点,计算过程即已知齿圈和太阳轮的速度,求解行星架的速度解析式,通过引入行星轮的速度瞬心,从而建立了三者之间的等式关系。
3 结论
行星齿轮传动具有传动比大、传动平稳性好、传动效率高、结构紧凑等优点,被广泛应用于各种工程机械、运输车辆等机械设备中。 针对行星齿轮传动比计算问题,本文在分析已有传动比计算方法的基础上,通过借鉴引入平面运动物体的速度瞬心概念,以标准渐开线直齿轮为研究对象,对行星齿轮传动系统传动比进行求解,给出了基于速度瞬心的行星齿轮传动比推导过程,求得了各个构件之间的运动关系,与以往的机构转化求解法相比, 本方法更能清楚地描述行星齿轮系中行星轮的运动状态。
