自主水下航行器自噪声控制及实验验证
2021-01-19张明马骁晨李建龙
张明,马骁晨,李建龙
(浙江大学 信息与电子工程学院,浙江 杭州 310027)
0 引 言
自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种可以根据预设任务,在水下自主航行的无人潜水器,具有自主航行、自主导航、自主探测的功能[1-4]。近年来随着AUV 能源、导航、自动控制技术等方面的提升,AUV 作为移动测量平台逐渐被应用于海洋环境监测、水下目标识别、水底地形探测等领域[5-7]。由于AUV 平台较小,其自噪声严重制约搭载于平台的声呐系统性能。如何有效控制AUV 的自噪声,对于平台声呐系统实现最佳性能具有重要实际意义。
AUV 的自噪声主要由航行器舵机等产生的机械噪声、螺旋桨噪声和水动力噪声几部分组成[8-9]。文中的AUV 典型航速为3 kn,航速较低,噪声主要由机械振动、螺旋桨噪声产生[10],本文主要对舵机等转动产生的机械噪声、螺旋桨噪声进行分析。通过AUV 平台与声呐系统一体化控噪设计,利用机械降噪、隔振材料、智能控制等手段,对AUV 进行系统性噪声控制。
1 AUV 自噪声分析及控制
1.1 自噪声分析
本文AUV 推进系统采用单推进器、4 个舵机驱动的方式,其结构如图1 所示。推进器电机固定于舱体内部,通过联轴器、传动轴驱动螺旋桨转动,产生推力;4 个舵机固定于舱体内部,通过轴杆驱动舵板转动,控制方向和升沉。
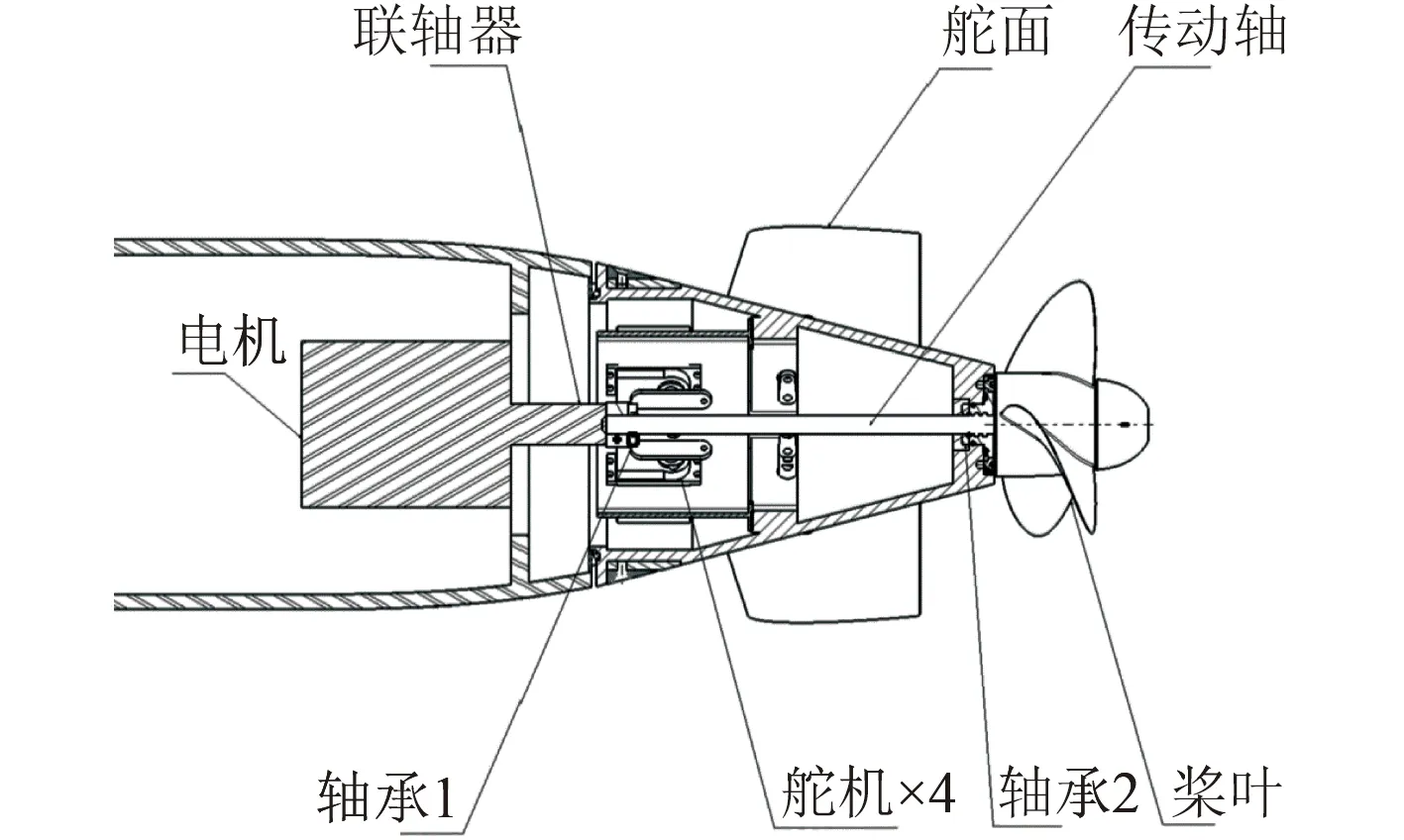
图 1 AUV 推进系统结构图Fig. 1Propulsion system structure diagram
首先在室内对推进器噪声、舵机噪声进行测试。推进器噪声分为电机噪声、电机加传动轴的噪声,以及电机加传动轴和螺旋桨的噪声。电机噪声指拆除传动轴和螺旋桨,只将电机固定在舱体内工作所产生的噪声;电机加传动轴噪声指电机接上传动轴后工作所产生的噪声;电机加传动轴和螺旋桨噪声指电机接上传动轴,并且安装螺旋桨后工作所产生的噪声。为了测试不同部件的噪声,本文对这几部分噪声单独测试。声学测量设备为麦克风和一套数据采集系统,其中数据采集系统采样频率52 kHz。室内噪声测试结果已经做归一化处理。
图2 为电机在不同转速下(分别为300 ,400 和500 r/min)的噪声,可以发现在15 kHz 附近有一个较强的单频信号,其频率值不随转速的改变而发生变化,其幅度会随着转速的增大而增大。
图3 比较了推进系统电机噪声、电机加传动轴的噪声,以及电机加传动轴和螺旋桨的噪声,电机转速500 r/min。可以发现,3 种情况总体噪声特性基本一致,加装传动轴、螺旋桨后在低频处的噪声会增大。由于在空气中测试,螺旋桨转动没有与水体接触的噪声,所以相比于只安装传动轴,噪声特性变化不大,需要在湖上进一步测试。
对舵机噪声进行测试,如图4 所示。这是转舵18°的噪声测量结果,可以发现噪声频带较宽,并且在低频区域(0.5~1 kHz)噪声尤为明显。
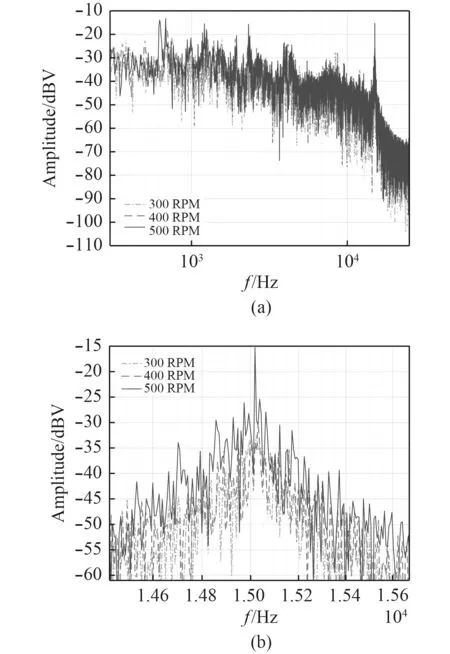
图 2 不同转速下电机噪声、幅度已归一化处理Fig. 2The motor noise at different speeds, the amplitude has been normalized
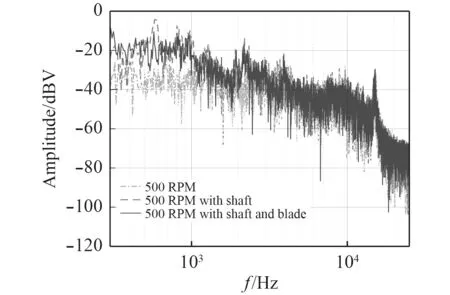
图 3 推进系统电机噪声、电机加传动轴噪声,以及电机加传动轴和螺旋桨噪声比较Fig. 3Comparison of propulsion system motor noise,motor plus drive shaft noise, and motor plus drive shaft and propeller noise
1.2 自噪声控制
电机通过螺丝固定在舱体内部,为了减小电机振动,并且减小振动噪声通过壳体传播,本文在电机固定面增加橡胶垫。此外,在电机舱内壁包裹一圈隔音棉,以起到吸收噪声、减小噪声通过舱体向外辐射的效果。图5 为对电机进行降噪处理后的测量结果,可以发现降噪效果较为明显,尤其是在15 kHz 处,噪声下降约20 dB。
通过分析可知,电机安装传动轴后噪声会变大,其中一个原因是传动轴与电机安装不够紧密,对传动轴连接件做改进,使安装间隙减小,以起到降噪的效果。
本文AUV 采用的是减速舵机,通过齿轮减速,以提高转动扭矩,所以在转舵过程中由于齿轮的转动,会产生噪声。1.1 节图4 中舵机是快速转舵18°,也就是驱动模块在收到转舵18°指令后,以最快的速度转到18°的舵角。通过优化舵机转舵方式,降低转舵速度,但又不影响控制效果,比如每20 ms 转舵4°,100 ms 内完成转舵,这样舵机齿轮转动的噪声就会降低。图6 为优化转舵方式后的噪声特性与未优化时的噪声特性比较结果,可以看到优化转舵方式后,噪声明显减小。
优化转舵方式能降低舵机的噪声,根据测量任务,优化推进系统控制方式,也能进一步降低噪声,对此将在湖上试验进行验证。
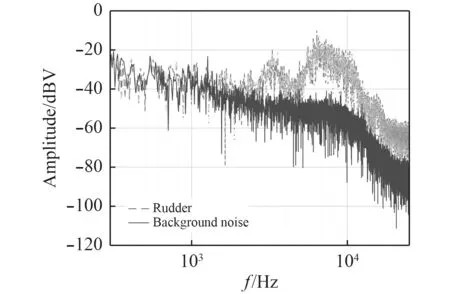
图 4 舵机转舵噪声,背景噪声,舵机转动噪声Fig. 4Steering gear rudder noise: background noise,steering gear rotating noise
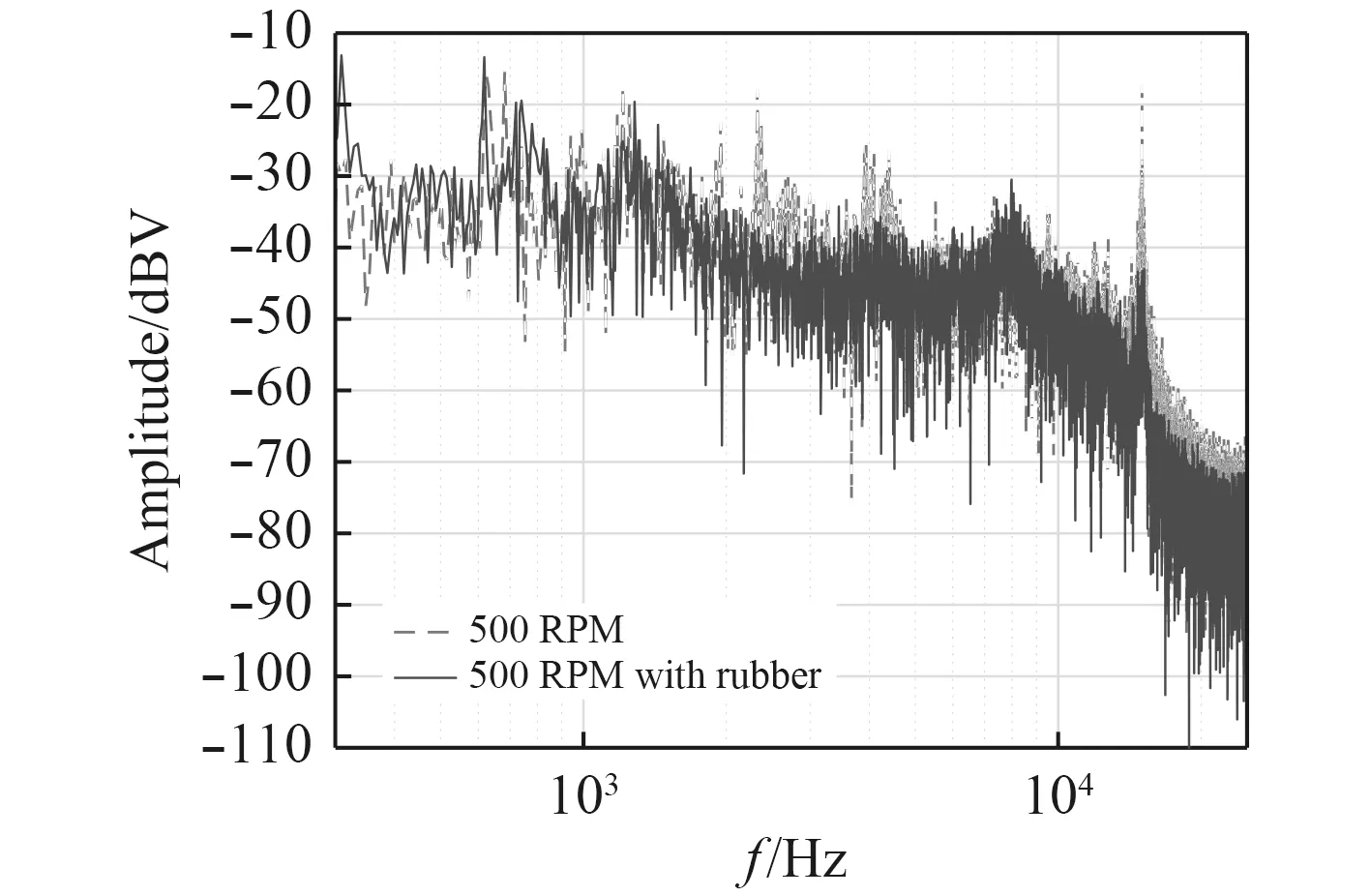
图 5 电机降噪处理后的噪声,降噪前的电机转动的噪声,增加橡胶垫和隔音棉后的噪声Fig. 5Noise after motor noise reduction processing; noise from motor rotation before noise reduction, noise after adding rubber pad and sound insulation cotton
2 湖上试验
AUV 首先在湖上利用水听器进行噪声测试,图7比较了AUV 静止状态下电机转动、电机安装螺旋桨后转动,以及舵机转舵情况下的噪声。电机转动时噪声频谱较宽,在15 kHz 处有一个明显的噪声,与室内测试一致;当安装螺旋桨后,由于螺旋桨在水体中转动,低频处的噪声会增大;转舵时,低频处的噪声较大,与室内测试一致。
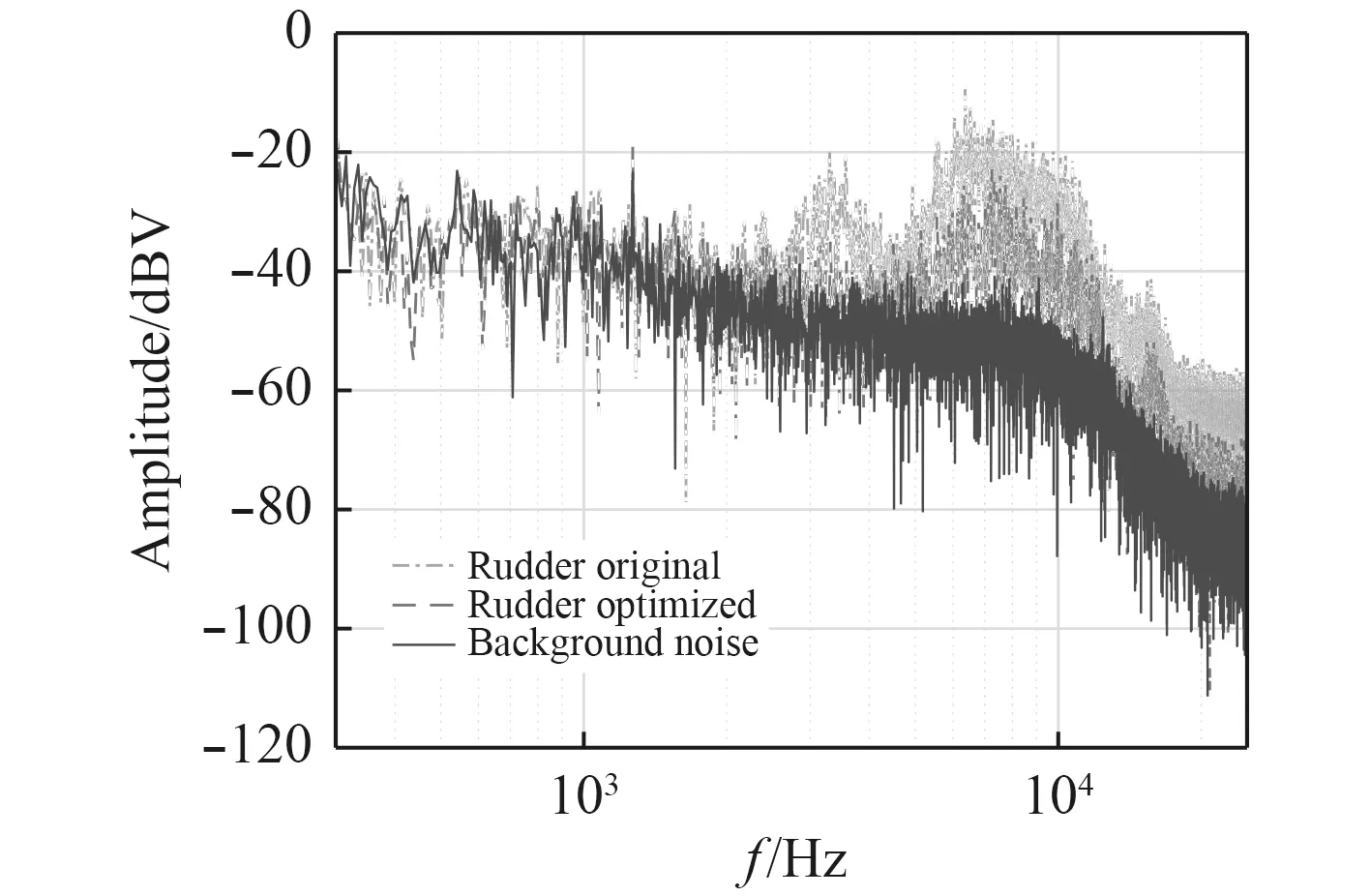
图 6 优化转舵方式的噪声,背景噪声,优化转舵方式后的噪声,原始转舵方式下的噪声Fig. 6The noise of the optimized rudder mode; background noise;the noise after optimized rudder mode; noise in the original rudder mode
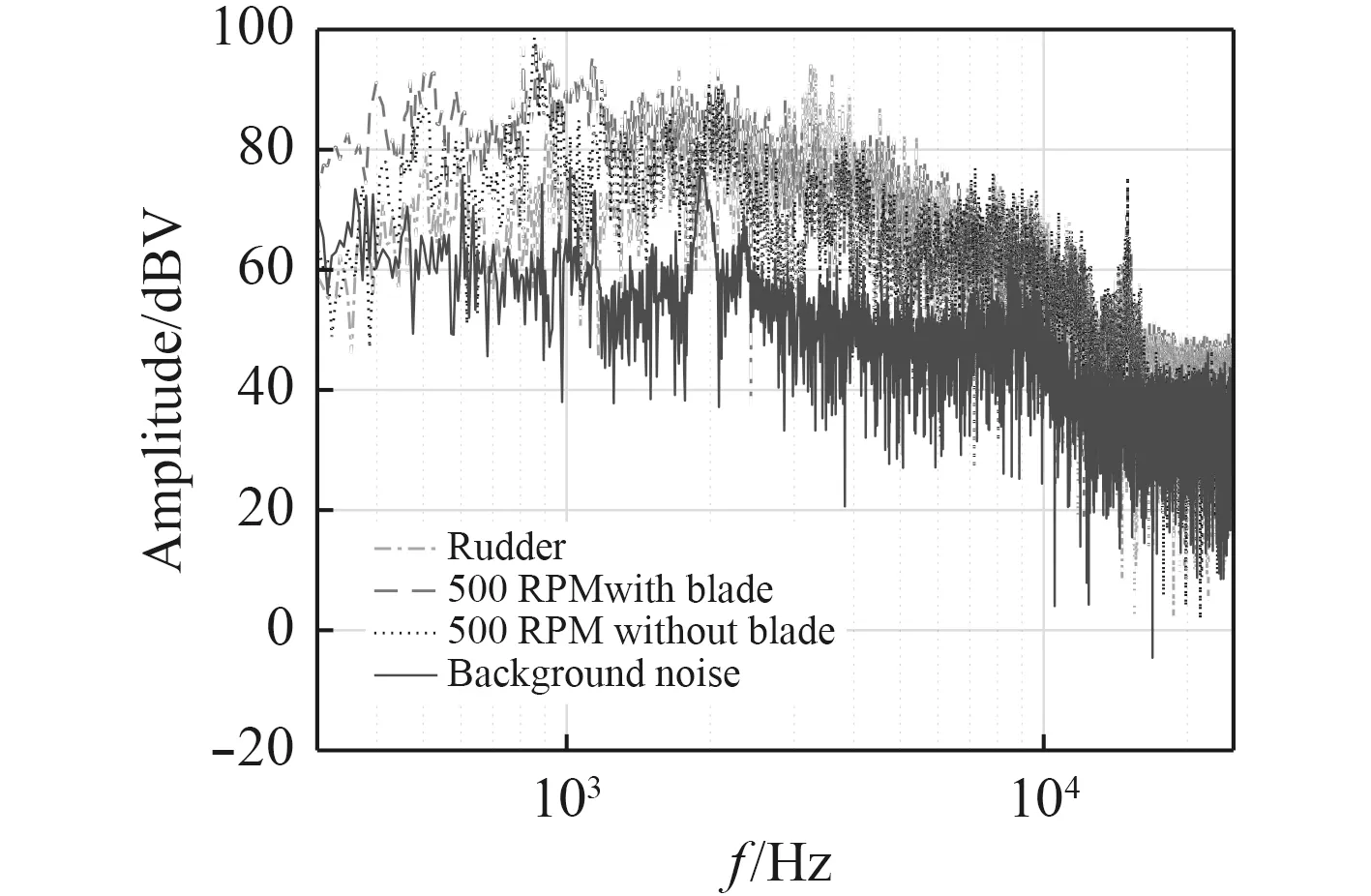
图 7 AUV 静止状态下湖上噪声测试,背景噪声,未安装螺旋桨的噪声,安装螺旋桨后的噪声;舵机转动的噪声Fig. 7AUV noise test on the lake in a static state, background noise, noise without propeller installed, noise after propeller installed; noise from steering gear rotation
湖上航行试验主要对AUV 工作状态下总体噪声进行测试,即AUV 以平均航速3 kn 航行,航行深度10 m,利用搭载在AUV 上的水听器及数据采集系统记录噪声,比较AUV 正常航行,以及经过智能噪声控制后的噪声特性。智能噪声控制指根据测量任务,优化转舵方式,优化电机控制,但不影响整体航行及测量。噪声测试结果如图8 所示。在正常航行情况下,AUV 噪声较大,在低频处噪声大于100 dB;当进行智能噪声控制后,噪声幅度明显减小,1 kHz 以上频率除个别频点外基本控制在80 dB 以下。个别频点可能是测试环境中有其他信号的干扰,需要进一步验证。
3 结 语
本文主要对AUV 推进系统自噪声进行分析,提出自噪声控制方法,通过隔振材料和吸声材料的应用,降低推进器电机的噪声;通过减小联轴器与电机及螺旋桨的安装间隙,降低联轴器等传动装置引入的噪声;通过优化转舵控制方式,减小舵机转动时的噪声;通过优化推进系统控制方式,降低AUV 工作时的噪声。通过室内及湖上测量,验证了降噪措施的有效性。湖上试验结果表明,在典型平均航速为3 kn 情况下,平台自噪声1 kHz 以上频段可控制在80 dB 以下。
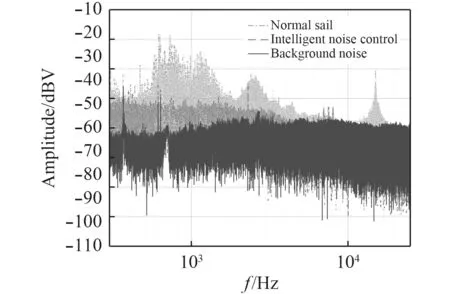
图 8 AUV 湖上航行噪声测试,背景噪声,智能噪声控制后的结果,正常航行的噪声Fig. 8AUV noise test on the lake in sailing mode; background noise, the result of intelligent noise control,noise without intelligent noise control
