基于单信标测距辅助SINS的中层水域导航算法
2021-01-16刘湘衡王亚波刘贤俊
刘湘衡, 王亚波, 刘贤俊
基于单信标测距辅助SINS的中层水域导航算法
刘湘衡1, 王亚波2, 刘贤俊3
(1. 海军装备部驻武汉地区第六军事代表室, 湖北 武汉, 430000; 2. 武汉第二船舶设计研究所, 湖北 武汉, 430205;3. 东南大学 仪器科学与工程学院, 江苏 南京, 210096)
针对全球导航卫星系统和多普勒测速仪无法用于位于中层水域的深海潜水器的高精度导航定位问题, 文中提出一种经济可行的中层水域导航算法。该算法基于单程到达时间机制测量已知位置的信标到深海潜水器的距离, 并基于捷联惯性导航系统(SINS)误差传播模型和单信标测距模型设计扩展卡尔曼滤波器进行信息融合, 从而实现利用单信标测距信息辅助SINS以抑制其误差发散。仿真结果表明, 基于距离辅助SINS的中层水域导航算法能够获取误差不随时间累积的定位结果。此外, 文中从解析可观测性的角度, 对深海潜水器的静止和圆周运动轨迹进行了精度分析, 且理论分析与仿真结果吻合。
深海潜水器; 中层水域导航; 单信标测距; 捷联惯性导航系统; 扩展卡尔曼滤波器
0 引言
现有中层水域导航方法主要包括惯性导航系统和声学定位[4,8]。SINS是一种基于积分工作模式的导航系统, 具有可靠性高、完全自主、数据输出率高和导航信息丰富等优点, 目前已广泛应用于水下潜水器的导航、制导与控制。但其误差随时间累积, 在海洋环境中通常需要水下声学定位系统来修正SINS的位置误差累积[8]。
根据可用辅助导航信息源的不同, 现有中层水域惯性组合导航系统主要包括声学辅助SINS和速度辅助SINS。速度辅助SINS主要包括模型辅助、声学多普勒流速剖面仪(acoustic Doppler current profiler, ADCP)辅助和流辅助等[4, 6-7]。文献[4]利用搭载的海流估计模型和ADCP测量构建一套海流辅助惯性导航框架。文献[6]基于下潜过程中海流速度短期保持不变的假设, 提出一种基于ADCP的定位方法, 然而ADCP与SINS的融合有待进一步考察。文献[7]提出一种模型辅助惯性导航方案, 该方案的定位精度与洋流速度估计和水下载体的运动学/动力学模型精度有关, 且需要事先试验精确获取相关模型参数。这些技术在一定程度上能够有效地提高中层水域导航性能, 却存在一定的使用先决条件且仅仅只能抑制SINS误差发散的速度。
对于声学辅助SINS, 主要包括超短基线(ult- ra short base line, USBL)[9-10]、长基线(long base line, LBL)[11]和单信标导航[12], 其中SINS/USBL已经广泛应用于深海潜水器的导航定位。尽管基于声传播的LBL系统或USBL系统都可以提供绝对的位置信息, 仍不可避免地存在难以部署或者价格昂贵等问题[6]。与USBL和LBL相比, 单信标导航由于具有减少部署复杂性和硬件复杂性的特点, 近年来得到越来越多的关注[13-15]。现有的单信标导航技术主要是通过设计直接卡尔曼滤波来融合姿态传感器、DVL测速信息和单个测距信息来实现[13-14], 并未考虑地球曲率和地球自转, 且仍然存在DVL在中层水域不可用以及洋流速度无法获取或估计的问题。文中针对深海潜水器下潜/上浮和中层水域巡航过程中的导航定位问题, 提出了一种基于单信标距离辅助SINS的中层水域导航方案, 可提供不随时间累积的定位结果。该方案利用单程到达时间计算问答机到应答器的距离, 结合测得的深度信息计算出信标(位置已知)与潜水器之间的水平距离, 通过扩展卡尔曼滤波器(extended Kalman filter, EKF)来融合水平距离信息与SINS, 仿真验证了其有效性。
1 SINS机械编排与误差传播方程
作为一种自主导航系统, SINS利用惯性测量单元(inertial measurement unit, IMU)测量载体的六自由度运动, 对IMU测量的角速率信息和比力信息积分计算得到载体的姿态、速度和位置信息。


其中


已知初始时刻的姿态、速度和位置, 通过对导航解算的微分方程(1)~(3)进行数值积分, 实时递归计算所得当前时刻的姿态、速度和位置。由于初始对准误差(例如失准角)、传感器误差(例如陀螺仪和加速度计偏置)以及导航算法误差(例如圆锥误差)的存在, 方程(1)~(3)中姿态、速度和位置的计算值跟真实值之间存在误差, 采用扰动法推导出SINS误差传播方程




2 单信标测距
水下信标可分为移动信标和固定信标2类。声学定位系统的定位精度通常与载体及信标之间的距离有关, 且信标的作用距离是有限的。移动信标相较于固定信标而言, 大大拓宽了单信标测距的作用范围和应用场景, 两者在原理机制上并无差别。对于固定信标而言, 需要事先布放在调查水域并精确测量其大地坐标。文中描述的单信标测距是利用安装在水面支持母船底部的问答机, 即移动信标来实现的。水面支持母船和深海潜水器上安装同步时间系统, 问答机以固定频率发出信号, 通过计算应答器接受到问询信号的单程到达时间, 来计算水面支持母船与深海潜水器之间的距离, 如图1所示。
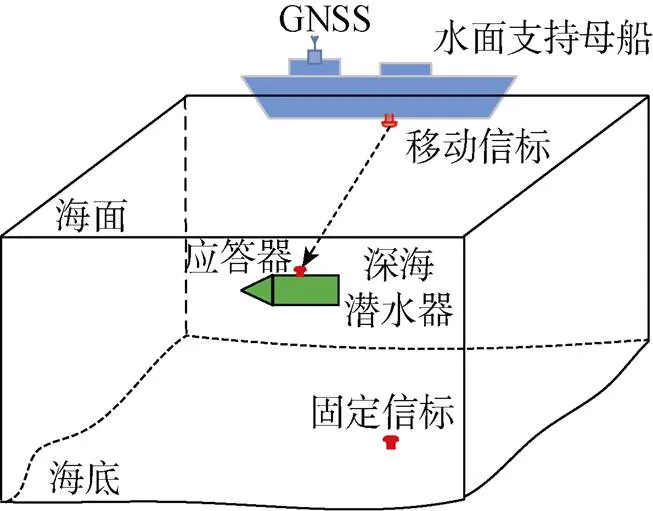
图1 单信标测距示意图

式中: 深度值z(或高度值)通过压力传感器精确获得; 距离, c为声波在水下的传播速度, 为传播时间差, 故水平距离为

整理式(14)和式(15), 得
3 距离辅助SINS组合导航
选取失准角、速度误差、位置误差、陀螺常值零偏和加速度计常值零偏为状态变量(15维), 水平距离和高度差为量测量(2维)
则系统连续时间状态方程和量测方程为
将式(18)转换成离散形式

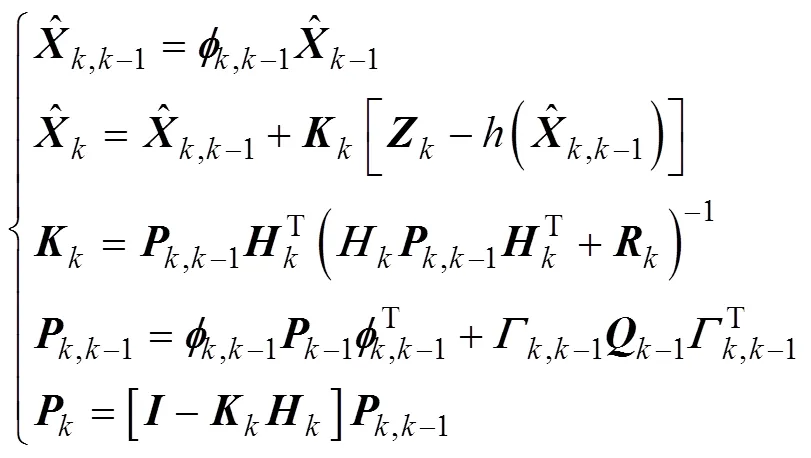
基于式(19)~(21)可构成距离辅助SINS的中层水域导航算法。
4 仿真结果及分析
4.1 仿真条件设置
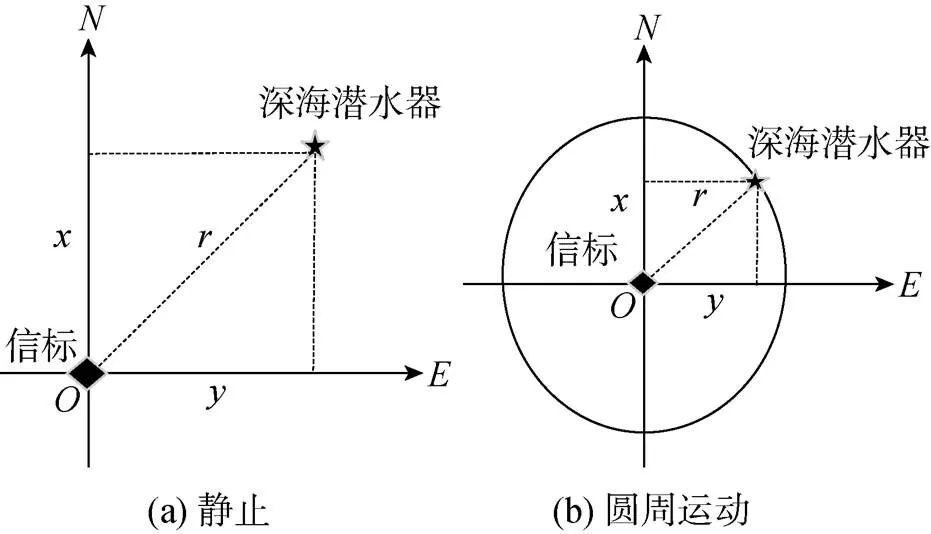
图3 深海潜水器仿真轨迹
4.2 仿真结果及分析
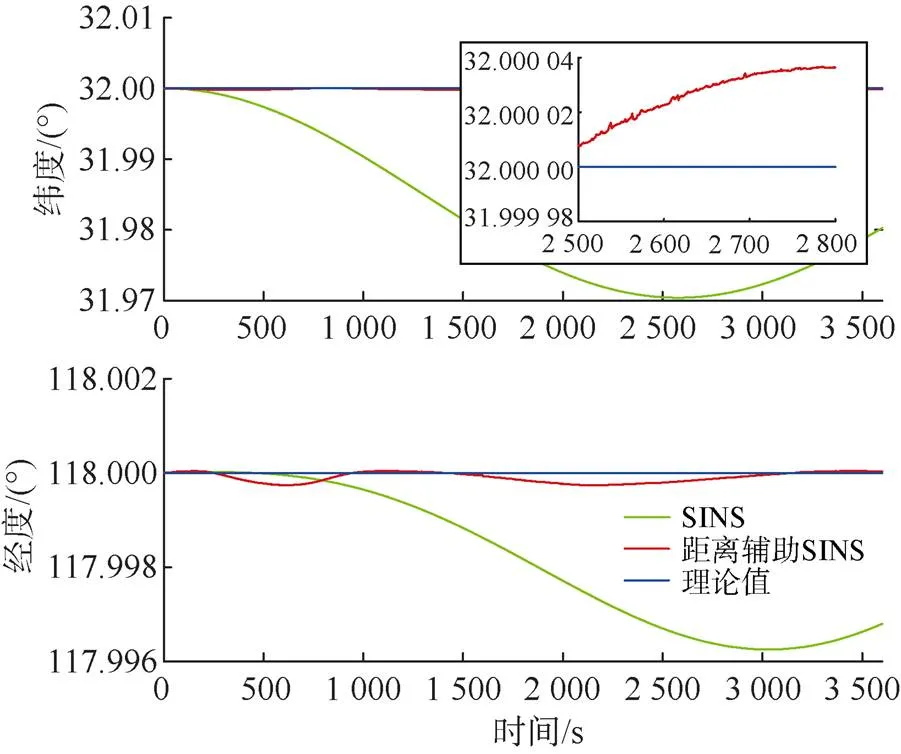
图4 静止时不同方案输出水平位置对比曲线
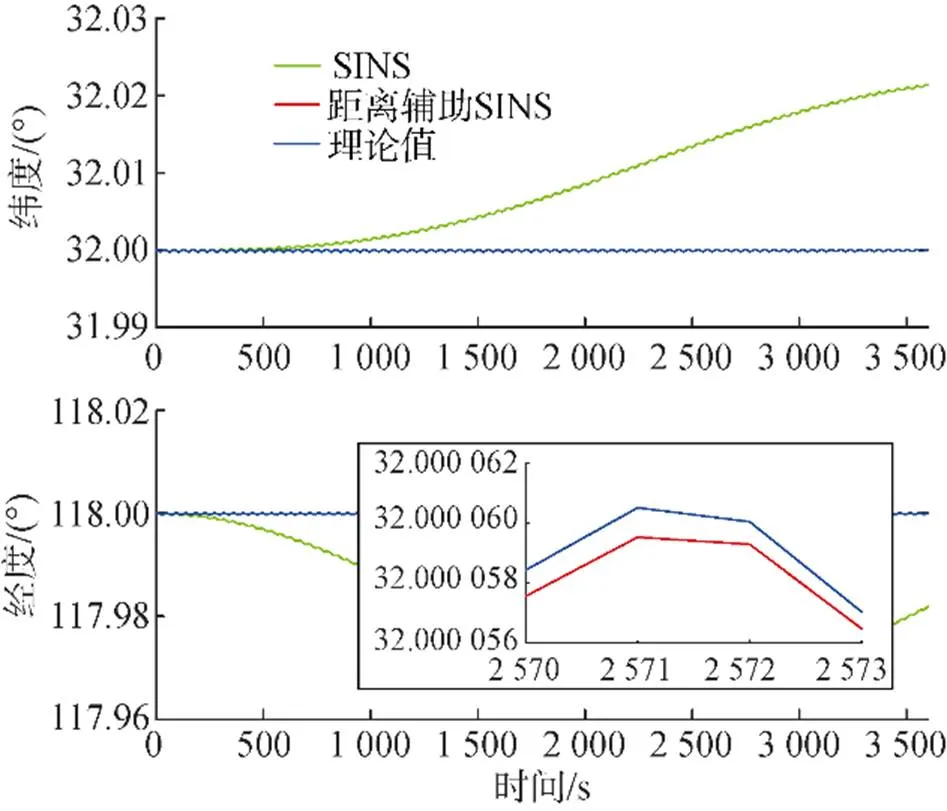
图5 圆周运动时不同方案输出水平位置对比曲线
为进一步直观评价定位精度, 将定位误差转换为以m为单位的位置误差
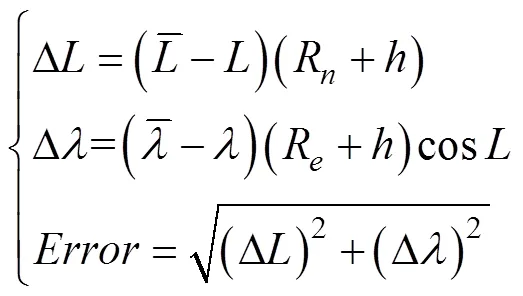

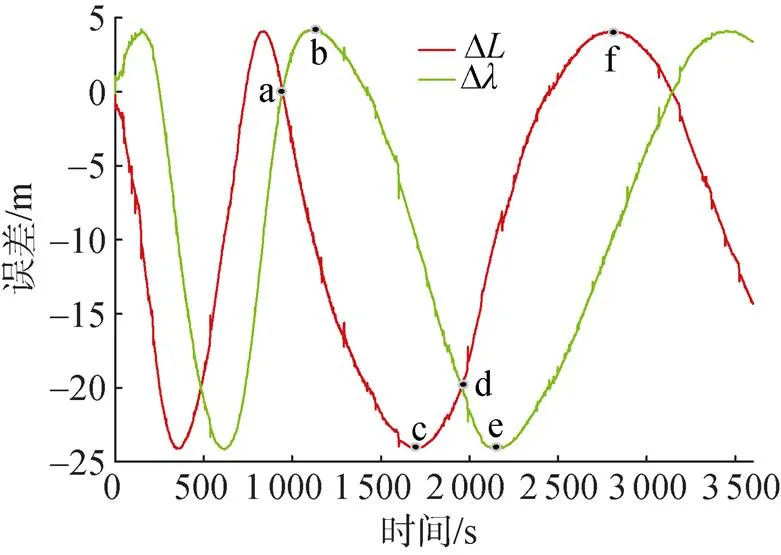
图6 静止时水平位置误差曲线
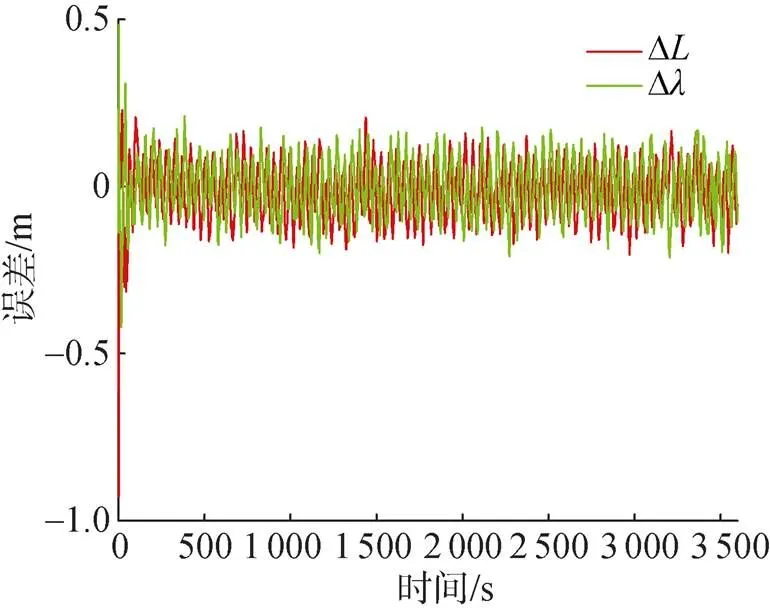
图7 圆周运动时水平位置误差曲线

距离约束使得定位精度
此外, 有
式(23)和式(24)代表的理论分析结果与图6中的仿真结果吻合。
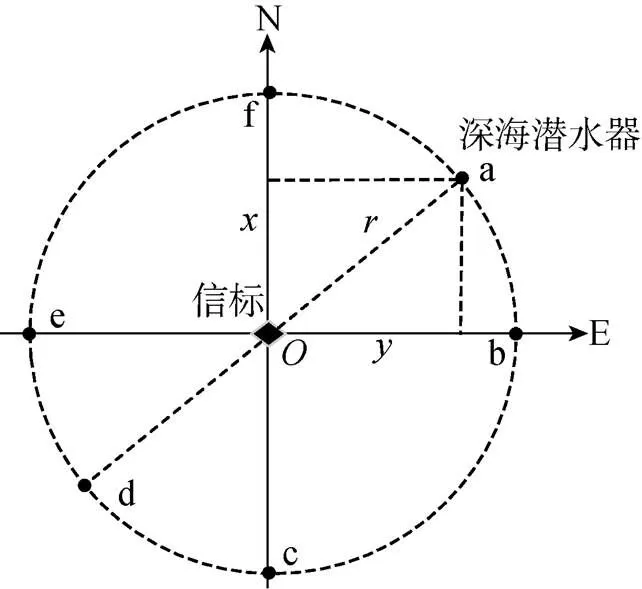
图8 静止水平位置误差分析示意图
5 结束语
文中针对中层水域可用导航传感器有限的问题, 提出一种基于距离辅助SINS的中层水域导航方法。该方法不需要使用昂贵的USBL水声定位系统(需要精确校准)和LBL水声定位系统(校准复杂、布放船时长), 通过测量信标到深海潜水器之间的距离, 并设计EKF来实现距离辅助SINS的组合导航方案, 具有作用范围远、实时性强、信息融合算法简单等优点。仿真结果表明,该方法可有效修正SINS的经纬度误差。解析可观测性分析可以帮助设计合适的机动条件以获取更高的定位精度。在后续研究中, 会进一步考察深海潜水器与移动信标同时机动以及不同机动组合条件下, 基于距离辅助SINS组合导航系统的可观测性。
[1] 张同伟, 唐嘉陵, 杨继超, 等. 4500 m以深作业型载人航行器[J]. 船舶工程, 2017, 39(6): 77-83.
Zhang Tong-wei, Tang Jia-ling, Yang Ji-chao, et al. Deep Operational Manned Submersibles>4 500 m[J]. Ship Engineering, 2017, 39(6): 77-83.
[2] Hekinian R. Sea Floor Exploration Scientific Adventures Diving into the Abyss[M]. New York: Springer, 2014.
[3] Vedachalam N, Ramadass G A, Atmanand M A. Reiability Centered Modeling for Development of Deep Water Human Occupied Vehicles[J]. Applied Ocean Research, 2014, 46: 131-143.
[4] Song Z, Mohseni K. Long-Term Inertial Navigation Aided by Dynamics of Flow Field Features[J]. IEEE Journal of Oceanic Engineering, 2018, 43(4): 940-954.
[5] Paull L, Saeedi S, Seto M , et al. AUV Navigation and Localization: A Review[J]. IEEE Journal of Oceanic Engineering, 2014, 39(1): 131-149.
[6] Medagoda L, Williams S B, Pizarro O, et al. Mid-water Current Aided Localization for Autonomous Underwater Vehicles[J]. Autonomous Robots, 2016, 40(7): 1207-1227.
[7] Hegrenaes O, Hallingstad O. Model-Aided INS With Sea Current Estimation for Robust Underwater Navigation[J]. IEEE Journal of Oceanic Engineering, 2011, 36(2): 316-337.
[8] Lee P M, Jun B H. Pseudo Long Base Line Navigation Algorithm for Underwater Vehicles with Inertial Sensors and Two Acoustic Range Measurements[J]. Ocean Engineering, 2007, 34(3-4): 416-425.
[9] Morgado M, Oliveira P, Silvestre C. Tightly Coupled Ultrashort Baseline and Inertial Navigation System for Underwater Vehicles: An Experimental Validation[J]. Journal of Field Robotics, 2013, 30(1): 142-170.
[10] Wang J, Zhang T, Jin B, et al. Student’s t-Based Robust Kalman Filter for a SINS/USBL Integration Navigation Strategy[J]. IEEE Sensors Journal, 2020, 20(10): 5540- 5553.
[11] Zhan T, Shi H, Chen L, et al. AUV Positioning Method Based on Tightly Coupled SINS/LBL for Underwater Acoustic Multipath Propagation[J]. Sensors, 2016, 16(3): 357.
[12] Lee P M, Jun B H, Kim K, et al. Simulation of an Inertial Acoustic Navigation System With Range Aiding for an Autonomous Underwater Vehicle[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 327-345.
[13] 刘健, 冀大雄. 用固定单信标修正水下机器人导航误差[J]. 控制与决策, 2010, 25(9): 1354-1358.
Liu Jian, Ji Da-xiong. Navigation Error Amendment for Underwater Robot Using Single Beacon[J]. Control and Decision, 2010, 25(9): 1354-1358
[14] 曹方方, 刘卫东, 李娟丽. 基于EKF的UUV单信标水声导航定位方法研究[J]. 计算机测量与控制, 2011, 19(9): 2234-2236.
Cao Fang-fang, Liu Wei-dong, Li Juan-li. Navigating and Positioning Based on EKF for Unmanned Underwater Vehicle from A Single Beacon[J]. Computer Measurement & Control, 2011, 19(9): 2234-2236.
[15] Mcphail S D, Pebody M. Range-Only Positioning of a Deep-Diving Autonomous Underwater Vehicle From a Surface Ship[J]. IEEE Journal of Oceanic Engineering, 2009, 34(4): 669-677.
[16] 刘锡祥, 程向红.捷联式惯性导航系统初始对准理论与方法[M].北京: 科学出版社, 2020.
Midwater NavigationAlgorithm Based on Single-Beacon Ranging-Aided SINS
LIU Xiang-heng1, WANG Ya-bo2, LIU Xian-jun3
(1. The Sixth Military Representative Office of the Naval Equipment Department in Wuhan, Wuhan 430000, China; 2. Wuhan Second Ship Design and Research Institute, Wuhan 430205, China; 3. School of Instrument Science & Engineering, Southeast University, Nanjing 210096, China)
Global navigation satellite system and Doppler velocity log cannot be used for deep-diving undersea vehicles in midwater. Therefore, this study proposes an economically feasible midwater navigation algorithm to solve this problem. The algorithm utilizes the one-way arrival time mechanism to measure the distance from a beacon of a known position to a deep-diving undersea vehicle. To suppress error divergence of the strapdown inertial navigation system(SINS), an extended Kalman filter based on SINS error propagation and a single-beacon ranging model is designed to execute information fusion for single-beacon ranging-aided SINS. Simulation results show that the midwater navigation algorithm based on ranging-aided SINS can obtain localization results whose errors do not accumulate over time. In addition, for analytical observability, this study analyzes the accuracy of static and circular motion trajectories, where the theoretical analysis is shown to be consistent with the simulation results.
deep-diving undersea vehicle; midwater navigation; single-beacon ranging; strapdown inertial navigation system(SINS); extended Kalman filter
刘湘衡, 王亚波, 刘贤俊. 基于单信标测距辅助SINS的中层水域导航算法[J]. 水下无人系统学报, 2020, 28(6): 670-676.
U674.941; TN967.2;
A
2096-3920(2020)06-0670-007
10.11993/j.issn.2096-3920.2020.06.012
2020-07-22;
2020-10-21.
刘湘衡(1987-), 男, 硕士, 主要研究方向为船舶保障.
(责任编辑: 杨力军)