双钳位三电平逆变器平衡控制方法研究
2021-01-15陈学利
陈学利,刘 稳,郭 鹏
(1.济南广来电气安装有限公司,济南 250100;2.国网盱眙县供电公司,江苏 淮安 211700;3.国网如东县供电公司,江苏 南通 226400)
0 引 言
随着电力电子技术的发展,二极管钳位型三电平逆变器技术在高压大功率场合得到了广泛应用,然而这种拓扑结构的大规模推广受制于直流母线电容电压不平衡及各桥臂内侧功率器件关断过电压的影响[1-3]。为此,本文对一种二极管、电容双钳位拓扑结构进行了研究,通过该拓扑结构的应用,能够同时解决上述两个问题。
其最早由韩国学者Young-Seok Kim在1993年提出[4],此后较少有文献进行研究。直到2005年,文献[5]对这种拓扑结构的基本原理进行了分析,对于进一步的调制策略则未提及。2008年,文献[6]将这种拓扑结构应用于变频调速系统中,基本原理沿用了文献[5]的内容,空间矢量平衡调制方法通过比较直流侧两电容电压与三相钳位电容电压差值的方法实现,过程较为复杂。
本文在前文研究的基础上提出了一种通过开关状态切换实现钳位电容电压平衡的控制方法,并提出通过对288种“七段式”电压空间矢量组合对中点电位影响特性进行分析的方法,实现了直流侧中点电位的平衡控制,并通过仿真和实验进行了验证。
1 双钳位三电平逆变器工作原理分析
双钳位式三电平逆变器拓扑结构如图1所示。以A相为例,每相桥臂可以输出4种开关状态对应3种电平,如表1所示,其工作原理分析如下。
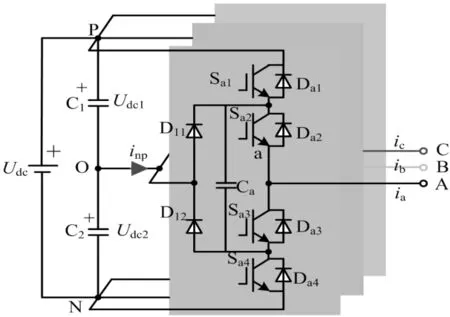
图1 双钳位三电平逆变器拓扑图
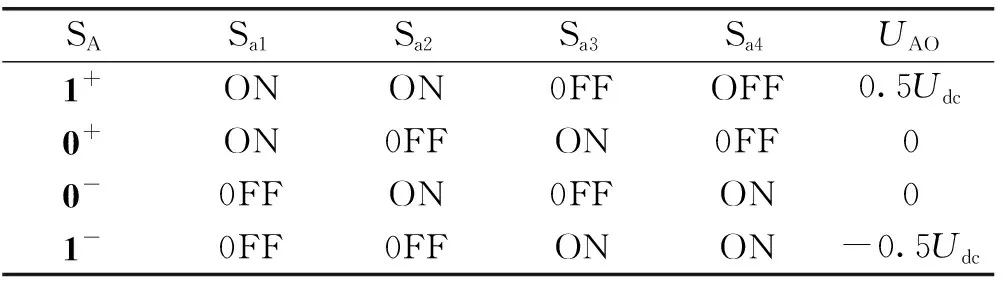
SASa1Sa2Sa3Sa4UAO1+ONON0FFOFF0.5Udc0+ON0FFON0FF00-0FFON0FFON01-0FF0FFONON-0.5Udc
(1)当开关状态SA=1+时,即A相桥臂开关Sa1、Sa2导通,Sa3、Sa4关断,此时的双向电流通路如图2中回路①、②所示。当直流侧电容C1两端电压高于钳位电容Ca两端电压时,将通过回路③对Ca进行充电,从而自动平衡直流侧电容C1、C2两端电压。

图2 开关状态SA=1+、1-时电流通路分析
(2)当开关状态SA=1-时,即A相桥臂开关Sa3、Sa4导通,Sa1、Sa2关断,此时的双向电流通路如图2中回路④、⑤所示。当直流侧电容C2两端电压高于钳位电容Ca两端电压时,将通过回路⑥对Ca进行充电,从而自动平衡直流侧电容C1、C2两端电压。
在这两种状态下,钳位电容Ca两端过电压均不能够释放,原因如下:Ca若要释放其两端电压,必须形成对负载的放电通路,即在SA=1+状态下,必须满足Sa3、Da1同时导通,但Sa3在这种状态下是关闭的,因此无法形成放电通路;同样在SA=1-状态下,若要形成对负载的放电通路,必须满足Sa2、Da4同时导通,但Sa2在这种状态下也是关闭的,因此无法形成放电通路。
(3)当开关状态SA=0+时,即A相桥臂开关Sa1、Sa3导通,Sa2、Sa4关断,此时的双向电流通路如图3中回路⑦、⑧所示。当直流侧电容C1两端电压高于钳位电容Ca两端电压时,其充电回路与图2中回路③一致。
当Ca两端电压高于半母线电压且电流由回路⑧流动时,此时Da1满足导通条件,Sa1也是导通的,则Ca将通过图3中回路⑨对负载进行放电。
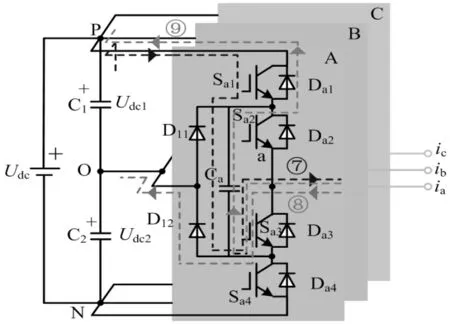
图3 双钳位逆变器SA=0+时通路分析
(4)当开关状态SA=0-时,即A相桥臂Sa2、Sa4导通,Sa1、Sa3关断,此时的双向电流通路如图4中回路⑩、所示。
正如品牌的公益之旅从未停止,天王表对时尚的探索也从未曾停歇。2018年,天王表将对征服者智勇齐备、一往无前的无畏探索精神融入腕表时间哲学之中,传递和演绎了天王表对“征服者”的臻意相颂。随着一众外籍型男超模登台,将作为活动主咖的天王表征服者系列腕表所蕴含的精神内涵进行了丰富演绎及魅力展示。

图4 双钳位逆变器SA=0-时通路分析
当直流侧电容C1两端电压高于钳位电容Ca两端电压时,其充电回路与图2中回路⑥一致。当Ca两端电压高于半母线电压,且电流经回路流动时,此时Da4满足导通条件,Sa2也是导通的,Ca将通过回路对负载进行放电。
由以上分析可得结论:(1)通过钳位电容与直流侧电容之间相互充放电过程能够实现直流侧中点电位的自动平衡控制;(2)只要Sa1、Sa4导通即可对Ca进行充电,即在四种开关状态下均可实现钳位电容充电控制;但仅在SA=0+、SA=0-且满足特定电流通路的情况下,Ca才能够放电。(3)由以上两个结论可知,若要实现直流侧电容与钳位电容之间的均衡控制,关键是要满足钳位电容的放电条件。
2 钳位电容电压平衡控制策略
本文根据电流通路不能突变的特点提出了通过开关状态切换实现钳位电容电压平衡的控制方法[7-8]。以A相为例,由前面的分析可知,钳位电容电压平衡的关键是使放电通路⑨或导通。而放电通路⑨导通的前提条件是回路⑧和Da1导通;放电通路导通的前提条件是回路和Da4导通。而在两种零电平状态下,当回路⑧或导通且钳位二极管两端电压大于半母线电压时,二极管Da1或Da4会自动导通。因此,仅需考虑如何使回路⑧或导通。由于电流方向不能突变,因此可以考虑通过开关状态之间的相互切换实现回路⑧或的导通,分析如下。
当SA=1+与SA=0+相互切换时,电流在回路①与⑦之间相互切换,不满足放电条件;当SA=1+与SA=0-相互切换时,电流在回路①与之间相互切换,回路导通,满足放电条件;当SA=1-与SA=0+相互切换时,电流在回路④与⑧之间相互切换,回路⑧导通,满足放电条件;当SA=1-与SA=0-相互切换时,电流在回路④与⑩之间相互切换,不满足放电条件,电流回路见图2、图3、图4。因此,当开关状态的切换遵循SA=1+与SA=0-、SA=1-与SA=0+的规律时,即可能够满足放电通路形成的条件,进而实现钳位电容电压的平衡控制。对于双钳位三电平整流,仍可采用这种方法作类似分析,得出整流状态下应满足SA=1+与SA=0+、SA=1-与SA=0-切换规律才能够实现钳位电容电压平衡。
3 电压空间矢量平衡控制方法
双钳位三电平逆变器可以输出34=64种电压空间矢量。其中,每个零矢量对应10种冗余开关状态,每个小矢量对应6种冗余开关状态,每个中矢量对应2种冗余开关状态,每个大矢量对应1种开关状态,矢量图如图5所示。

图5 双钳位三电平逆变器电压空间矢量图
由于电压空间矢量对直流侧上、下半母线电容C1、C2两端电压的影响仅与流过中点电位的电流inp有关,与钳位电容电流无关,因此在分析直流侧电压平衡控制时,可以忽略钳位电容电压影响。则此时双钳位三电平逆变器中点电位平衡控制与二极管钳位三电平逆变器方法一致,可以参考文献[9]。通过对64种空间矢量对中点电位的影响特性进行分析,得出其对中点电位的影响可以归纳为5类,如表2所示。
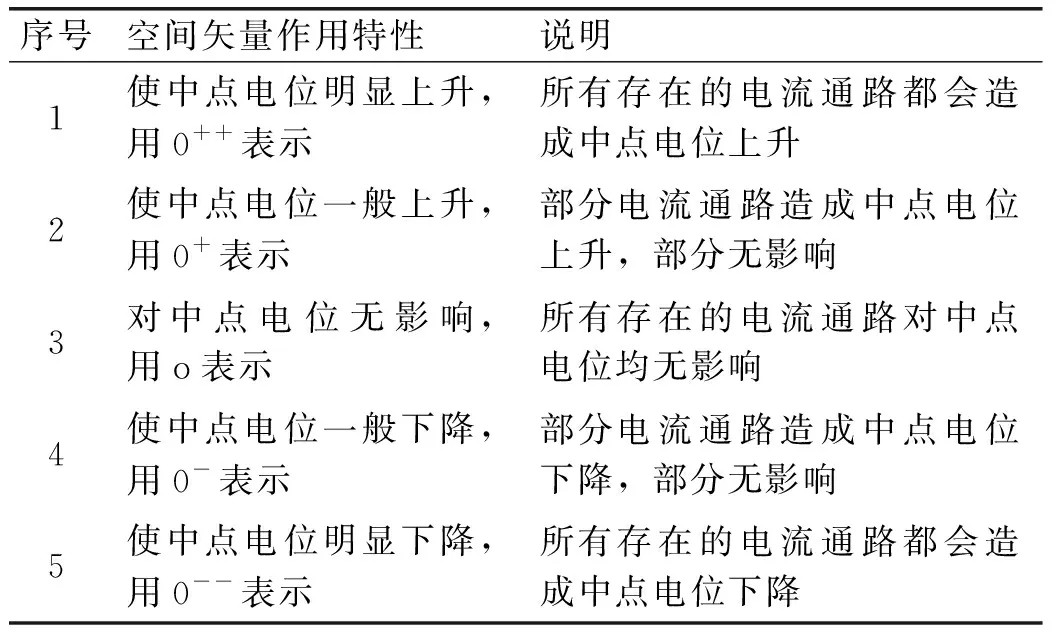
表2 空间矢量对中点电位影响特性
得出64种空间矢量的影响特性后,进一步分析“七段式”空间矢量的选择。由于空间矢量的增多,每个小三角形中“七段式”SVPWM调制序列增加至8种,以图5中大扇区S=1,小扇区n=1~6为例,其存在48种“七段式”电压空间矢量序列,如表3所示。

表3 大扇区S=1,小扇区n=1~6时,48种“七段式”电压空间矢量序列
以图5中S=1,n=1为例,空间矢量序列对中点电位影响特性如表4所示,每个空间矢量下方符号代表其对中点电位的影响特性。结合“七段式”空间矢量序列作用时间的对称性,由表可见作用序列1、2、6会造成中点电位下降;作用序列3、4、5会造成中点电位上升;只有作用序列5、8的影响最弱,而小的电位波动可以通过直流母线电容与钳位电容之间相互充放电实现自动平衡。
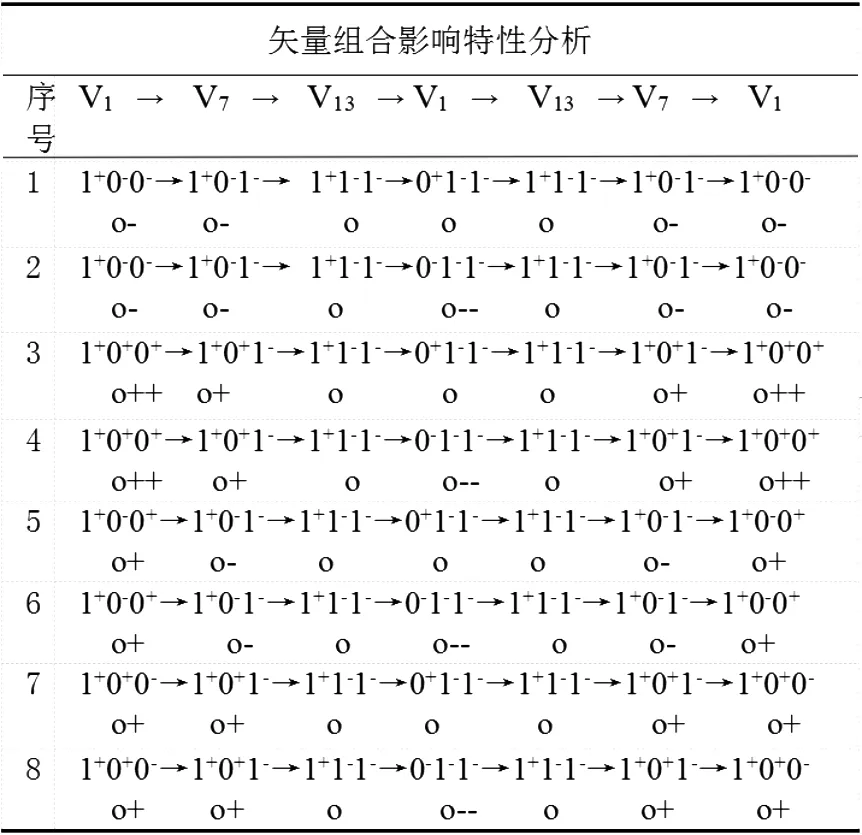
表4 S=1,n=1时空间矢量对中点电位影响特性
进一步根据钳位电容电压平衡条件作筛选,以A相为例,由钳位电容电压平衡控制方法可知,逆变状态下当开关状态的切换遵循SA=1+与SA=0-、SA=1-与SA=0+的规律时才能够实现钳位电容电压平衡控制。其中作用序列5中A、B两相不满足切换条件,作用序列8中仅C相不满足切换条件,另外两相满足,不满足条件的这一相可以通过在下一个小三角形中选择满足条件的矢量组合。因此,最终选择作用序列8作为该小三角形的矢量作用次序。
其他5个大扇区中的240种“七段式”电压空间矢量序列可以采取同样的方法进行分析,最终从288种“七段式”电压空间矢量作用序列中选择出既满足钳位电容电压平衡,又满足中点电位平衡的空间矢量作用序列。
4 仿真分析
为了验证控制方法的正确性,搭建了双钳位三电平逆变器及二极管钳位三电平逆变器Matlab仿真模型。二者共有的仿真参数一致,如下:直流母线电容C1=C2=4700 μF,阻感负载:RL=5 Ω,LL=1 mH,直流电源Ud=1140 V,采样频率2000 Hz。钳位电容Ca=Cb=Cc=1200 μF,仿真波形如图6所示。

图6 仿真波形
图6(a)为双钳位三电平逆变器输出线电压波形;图6(b)、图6(c)分别为双钳位和二极管钳位三电平逆变器输出中点电位波形;初始时刻将直流母线电容电压差值设为570 V时,双钳位和二极管钳位三电平逆变器中点电位自恢复波形如图6(d)、图6(e)所示。对比图6(b)~图6(e)可见,双钳位结构通过直流侧电容与钳位电容之间相互充放电的自调节过程,稳定中点电位的能力更强,恢复中点电位平衡的速度更快;图6(f)、图6(g)分别为钳位电容满足放电条件和不满足放电条件下Ca、Cb、Cc两端的电压波形,可见满足放电条件时钳位电容电压始终保持平衡状态;不满足放电条件时,由于形不成有效的放电通路,钳位电容难以释放其两端过电压,保持在与直流侧母线电压接近相等状态。
5 实验验证
为了进一步验证,基于绕线电机搭建了双钳位三电平逆变器样机实验平台,功率开关器件选用Infineon FF650R17IE4双管IGBT模块,直流母线电容为2x5000 μF的薄膜电容,钳位电容为1200 μF薄膜电容,控制系统采用TMS2812+Xinlinx CPLD/FPGA结构,实验波形如图7所示。
图7(a)~图7(e)分别为AB相之间线电压波形、中点电位波形、功率开关器件关断过电压波形、A相钳位电容两端电压波形及输出电流波形。由图7(a)可见,线电压Uab共有5种电平状态,与图6(a)仿真结果一致;由图7(b)可见,中点电位波动较小,实验测得中点电位波动在±42 V左右,可算得直流纹波系数约为3.75%;由图7(c)可见,当负载电流为305 A时,功率开关器件Sa2关断过电压约为600 V,通过钳位电容的钳位作用有效控制了功率开关器件的关断过电压;由图7(d)可见,钳位电容两端电压稳定在600 V上下波动,可见本文所采用的钳位电容控制方法能够有效实现钳位电容电压的控制;由图7(e)可见,负载电流波形正弦度良好。由实验结果可见,双钳位三电平逆变器拓扑结构能够有效保持中点电位的稳定,并抑制功率开关器件关断过电压。
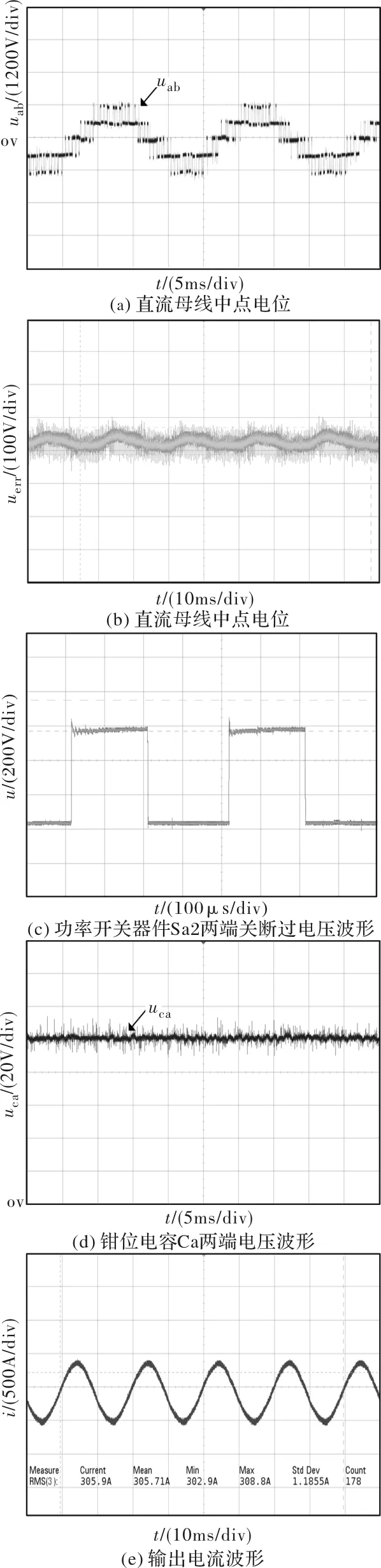
图7 实验波形
6 结 语
本文以双钳位三电平逆变器为研究对象,详细分析了其工作原理,并对其平衡控制方法进行了研究,分别提出了钳位电容电压及直流母线电容电压平衡的控制方法。通过Matlab仿真及基于双绕线电机实验平台进行了验证,结果均证实了控制方法的有效性及该拓扑结构在稳定中点电位及抑制过电压方面的优越性。
