一种红外导引头小型快速伺服稳定平台
2021-01-14王舒雁王春宇
董 超,王舒雁,刘 科,王春宇,常 晔
(中国空间技术研究院 北京控制工程研究所,北京 100190)
1 引 言
随着现代高性能武器系统的发展,对伺服稳定平台控制系统的控制技术及控制精度有更高的要求,在精确制导导弹上的应用成为非常重要的应用领域。本项目的应用背景是肩扛式反坦克导弹的红外导引头,其主要作用是通过瞄准具人工操作瞄准线运动,锁定目标并对目标进行跟踪。伺服稳定平台作为红外探测器和光学系统的载体,是精确制导武器的核心部件,其系统响应的快速性,稳定性和位置的精确性对红外成像制导的精度有着至关重要的影响[1]。
结合光学系统视场大小和跟踪视场范围的要求,伺服稳定平台采用了以MEMS速率陀螺为稳定核心,俯仰+偏航的双框架式结构,角度关系明确,简单紧凑,两通道相互独立、耦合少,方便设计和控制。利用DSP和FPGA构建平台控制电路,提出了一种电流、速度和位置三环串级PID改进型算法控制框架电机实现目标锁定和跟踪,并通过了转台试验验证。结果表明,该伺服稳定平台跟踪范围广、快速跟踪能力强、跟踪精度高、抗干扰性强。
2 伺服稳定平台结构设计
为了实现产品小型化和轻量化,同时满足跟踪范围俯仰-40°~+20°,偏航±20°的要求,伺服稳定平台采用了以MEMS速率陀螺为稳定核心,俯仰/偏航式双框架结构,如图1所示,由内框和外框组成,分别实现俯仰和偏航方向上的运动控制。两个框架轴两端分别安装力矩电机和绝对位置编码器,光学系统安装在内框上,背面安装速率陀螺。通过内框架的速率陀螺敏感两轴速度信息,内外框架的绝对位置编码器敏感角度信息,内外框架上的力矩电机控制角度驱动框架运动,从而实现平台上光学系统光轴的指向不变。

图1 伺服稳定平台框架结构图Fig.1 Frame structure of servo stabilized platform
速率陀螺作为伺服稳定平台的核心部件,其性能直接影响稳定平台的控制精度,所以选用MEMS惯性测量单元(IMU),能够敏感三轴的速度信息,经过了零位和灵敏度标定,并在内部对全温范围进行了补偿,精度更高,低噪声,零偏稳定性好,且模块对振动和冲击的敏感度很低。
位置编码器作为测角元件,选用绝对位置式光栅编码器,其为非接触式光电工作原理,因此与湿度、温度、振动等条件无关,体积小,可靠性高,精度高,上电即可读取当前位置,满足结构尺寸需求。
电机作为驱动部件,需要综合考虑平台的结构尺寸限制和负载力矩要求,选用定制尺寸的有限转角电机,持续输出力矩约为60 mN·m,满足性能需求。
3 伺服稳定平台控制系统设计
伺服稳定平台的主要作用为:稳定光电探测器的光轴,使光轴不受载体运动的影响,保证获得清晰地图像;实现光轴预置功能,将光轴预订指向需要的方向,提高目标发现速度;实现对目标的跟踪,通过伺服稳定平台控制光轴跟踪目标视线轴。
为实现上述功能本设计采用DSP和FPGA构建平台控制电路,以FPGA作为接口,DSP作为控制核心。伺服稳定平台控制系统电路框图如图2所示,FPGA读取MEMS陀螺仪的角速率数据、绝对位置编码器的角度数据以及图像处理后的坐标数据;伺服DSP读取电机电流的采集数据,和FPGA进行数据交互获得控制数据,完成电机控制算法输出电机控制PWM信号,经由光耦隔离输出给MOSFET功率驱动电路,从而控制电机带动框架运动[2-3]。

图2 伺服稳定平台控制系统电路框图Fig.2 Circuit diagram of servo stabilized platform control system
在实现功能的基础上,可以得出伺服稳定平台相应的主要技术指标包括预定精度、稳定精度、跟踪精度、最大跟踪速度等。而稳定精度和跟踪精度是所有动载体光电成像系统共同关注的重要问题,也是设计难点[4]。
稳定精度指标代表了稳定回路对载体运动的隔离能力。稳定精度指标设计首先要从满足光电成像系统探测器的性能要求出发,即避免或减小载体运动导致的图像模糊。同时还要从弹控的要求出发,即伺服稳定平台输出给弹控的视线角速度不能引起弹体抖动。关键指标为隔离度。
跟踪精度指标代表了跟踪回路对运动目标的稳定跟踪能力。跟踪精度指标设计要从满足跟踪位置精度和跟踪速度精度两方面的要求出发,即能快速跟踪的同时不能造成目标丢失。关键指标为跟踪回路带宽。
4 伺服稳定平台控制关键技术
影响伺服稳定平台隔离度和跟踪回路带宽指标的因素主要包含两个方面:一方面是伺服稳定平台所用的执行电机、机械结构件性能、传感器及控制器元器件的特性,另一方面是伺服稳定平台所采用的控制理论和控制算法,是最大限度发挥伺服稳定平台各组成部件性能的关键。本设计的关键技术为MEMS陀螺的数据处理[5]和三环串级PID控制算法[6]。
4.1 MEMS陀螺的数据处理
伺服稳定平台以MEMS陀螺为稳定核心,其性能直接影响稳定平台的控制精度,所以在选择性能较好MEMS陀螺的同时,对陀螺的输出数据也要进行处理,包括剔除野值、滤波和在线零位校准。
(1)剔除野值:陀螺的输出数据由FPGA通过RS422数字接口接收,采集周期为1 ms,通过对FPGA采集的原始数据观察,数据偶尔会受到干扰出现野值,野值不会在短时间内连续出现,且野值与正常值的偏差较大,影响电机控制,需要对陀螺数据进行实时野值剔除。通过对陀螺试验发现,当电机全速运转时,在相邻的两个采集周期陀螺的正常值偏差绝对值不会超过10,因此对相邻两个周期的陀螺采集值的偏差绝对值设置阈值10,当超过阈值时,判定后一个周期的陀螺采集值为野值,输出为前一个周期的采集值。当没有超过阈值时,判定没有出现野值,输出为后一个周期的采集值。
(2)滤波:陀螺的数据滤波采用了所选MEMS惯性测量单元(IMU)的内置滤波器,是带线性相位补偿的CIC低通滤波器,其本质为滑动平均滤波器的一种有效实现,通过对其寄存器进行参数配置选择不同的截止频率和延时,带宽越高,噪声越大,延时越小。滤波器参数的配置要对带宽和噪声进行综合考虑,选择截止频率为131 Hz,延时3 ms,陀螺数据输出噪声为0.2 °/s。
(3)在线零位校准:MEMS陀螺仪的一个特点是偏置不稳定,造成陀螺初始零位会随时间漂移,漂移的不良后果就是航向计算的误差会持续增加而不减退,同时伺服稳定平台输出的视线角速度的零位也会随之发生偏移。因此,需要对陀螺的零位进行校准。一种有效的校准方案是对陀螺实施零角速度更新,只要知道陀螺处于静止状态,便可将陀螺的偏移归零。零位校准的关键问题是校准的时机,在导引头处于电锁状态时,陀螺处于静止状态,且具有一定程度的抗干扰能力。具体方法为,导引头上电自检通过后,通过计算框架是否到达预置角位置判断是否进入电锁状态,确认进入电锁状态后,采集一段时间内陀螺静止稳定的数据,计算该段数据的均值,作为陀螺当前状态下的零位偏移量,后续使用陀螺数据时均减去这个偏移量,此时零位即得到校准。
4.2 三环串级PID控制算法
随着现代高性能武器系统的发展,对导引头伺服稳定平台控制系统的控制技术及控制精度有更高的要求,传统的单环或者双环控制已经不能满足性能需求。本设计主要采用了以电流环和速度环为内环,位置环为外环的三环串级PID控制算法,该算法可以对系统的环路从内到外进行逐步设计,通过提高某环路的带宽,可迅速抑制环路内的干扰,每个部分的设计都有明确的目标,在系统调试时可以提高效率,其工作原理框图如图3所示。
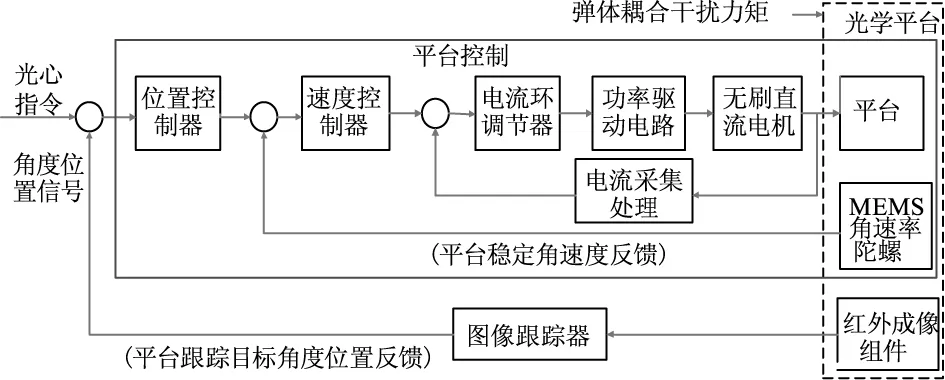
图3 三环串级PID控制原理框图Fig.3 Three loop cascade PID control principle block diagram
导引头工作于跟踪状态时,伺服系统通过电流采集和陀螺反馈闭合稳定回路,隔离载体扰动;通过图像跟踪器闭合跟踪回路,使光轴精确跟踪视轴的运动。
(1)电流环:电流环的作用是提高电流的响应速度,能够减小电枢电流在动态过程中的跳动情况,使电机的控制力矩平稳输出,同时可以提高系统刚度,提升系统的带宽。电流环的输入是速度环的输出,反馈是实时采集的电流。
不同于传统的硬件电流环设计,本设计采用了软件实现电流环,处理器主频150 MHz,电流环控制周期为50 μs,带宽可以做的更宽,调试参数更为方便。对反馈电流的检测采用了精密电阻和高共模抑制比的电流检测放大器来实现高边电流采集,对放大器输出进行了滤波处理,滤波算法为滑动平均滤波,同时软件对电流输出限幅1 A,提升可靠性。
(2)速度环:速度环的作用是保持视轴的稳定,能够隔离载体的抖动,提高系统的响应速度。速度环的输入是位置环的输出,反馈是MEMS速率陀螺的角速度输出。
本设计速度环在PID算法的基础上引入了抗积分饱和来调节积分环节的作用,积分环节并不能完全消除系统的稳态误差,只能根据控制误差不断累加,对控制信号进行补偿。这种情况下,控制器输出有可能会进入饱和区,整个系统陷入短暂失控状态。在软件中每次在积分环节累加前,先判断上一周期的控制量是否超过了最大设置值,如果超过设置值,则用设置值代替当前积分累加值,避免控制量长时间停留在饱和区,提高响应速度。对MEMS速率陀螺的输出则采用了上述中的剔除野值、滤波和在线零位校准的处理方式。
(3)位置环:位置环的作用是实现对图像中心坐标快速、稳定、精确地跟踪。位置环的输入是图像跟踪器的目标位置反馈与光心坐标的差值。
本设计位置环的输出既是速度环的给定输入,同时也是提供弹控的视线角速度,所以位置环算法关键在于控制输出的视线角速度波动。图像解算需要20 ms的时间,延迟较大,将位置环控制周期设置为1 ms,同时在算法中对图像坐标进行积分线性插值,使在20 ms下一帧图像坐标输入时能够平稳控制,视线角速度不会出现较大波动从而影响弹控。同时对输出给速度环的跟踪角速度进行限幅,避免跟踪角速度过大造成图像模糊。
5 试验验证
红外导引头产品通过了仿真和转台试验的验证,在试验过程中伺服稳定平台的隔离度和跟踪回路带宽都满足设计指标要求。隔离度设计指标要求为小于5 %,测试结果最大为3.8 %;跟踪回路带宽设计指标要求为2 Hz,测试结果为2 Hz。
隔离度测试:将导引头固定在转台上,目标源不动,转台以(3°,3 Hz)正弦摆动模拟载体抖动,测量输出视线角速度,如图4和图5所示。
跟踪回路带宽测试:将目标源固定在转台上,导引头不动,转台以(1°,2 Hz)正弦摆动,测量输出视线角速度与转台角速度,如图6和图7所示。

图4 干扰3°,3 Hz下的偏航视线角速度Fig.4 Yaw LOS angular velocity under disturbance 3°,3 Hz

图5 干扰3°,3 Hz下的俯仰视线角速度Fig.5 Pitch LOS angular velocity under disturbance 3°,3 Hz

图6 跟踪1°,2 Hz的偏航视线角速度Fig.6 Yaw LOS angular velocity of tracking 1°,2 Hz

图7 跟踪1°,2 Hz的俯仰视线角速度Fig.7 Pitch LOS angular velocity of tracking 1°,2 Hz
6 结 论
本文针对红外导引头伺服稳定平台小型化和快速稳定设计需求,采用了以MEMS速率陀螺为稳定核心,俯仰/偏航式双框架结构,利用DSP和FPGA构建平台控制电路,提出了一种电流、速度和位置三环串级PID改进型控制算法,实现了产品小型化设计,并对产品进行了转台试验验证,隔离度为3.8 %,跟踪回路带宽为2Hz,提高了产品的快速稳定性和控制精度,满足了设计需求。
