面向自动充电的自主泊车精准调节策略*
2021-01-13王永胜罗禹贡古谚谌齐蕴龙江发潮
王永胜,罗禹贡,古谚谌,陈 锐,齐蕴龙,江发潮
(1. 中国农业大学工学院,北京 100083;2. 清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
自主泊车系统在无需驾驶员操作或监督的情况下,可对车辆完全接管,控制车辆完成自主导航与自动泊车过程。自主泊车系统也可称为自动代客泊车(automated valet parking,AVP)系统[1],它作为 L4级自动驾驶低速场景下的典型应用,目前正成为产业界与学术界的研究热点[2-3]。自主泊车与自动充电功能的结合,将是未来智能交通系统的发展趋势之一[4-6]。SAE International 发布的电动汽车无线充电标准J2954 指出:WPT(wireless power transfer)在结合自动泊车与自动充电方面为自动驾驶提供了附加优势[6]。然而,接触式自动充电(如自动充电机械臂)需要车辆较为精确地停在指定区域,而非接触式自动充电(如无线充电)的效率与充电装置的对接位置直接相关,较大的纵横向位置偏差将严重降低充电效率[7-8],因此有必要开展自主泊车与自动充电系统精准对接方面的研究。
目前,自动泊车方法的研究多以提高泊车过程中的控制精度为目标,在保证不侵入其他车位的同时准确入库。文献[9]~文献[11]中针对初始阶段或泊车过程中车辆偏离参考路径的问题,利用多段泊车路径规划,通过前后多次往复运动将车辆调整至参考路径。文献[12]~文献[14]中利用先进的预瞄方法与控制方法,提高了泊车的路径跟踪控制精度。但现有的研究并未关注泊车完成之后,车辆停止位置的偏差是否达到了需求精度,在未达到需求精度时如何降低该偏差。而解决此问题对保证自动充电系统的良好工作至关重要。
为满足智能电动车辆在自动充电时,充电装置对对接位置准确性的高要求,本文中提出为自主泊车加入精准调节功能,并相应提出了基于“前进方向偏差与倒车横向位置偏差(forward orientation and reverse lateral position deviations,FORLPD)”的精准调节策略。首先,通过基于预瞄视角的两点匹配和基于预瞄前视点匹配的双向检索策略,解决了单点预瞄方法在大曲率路径下,检索预瞄参考点时可能存在的检索异常点与检索失效问题。然后,基于FORLPD 精准调节策略,通过车辆前进运动过程中的航向角偏差、倒车运动过程中的横向位置偏差,在车位宽度范围内实现小角度的转向控制,保证了自主泊车完成时自动充电装置的对接精度与对接成功率。
1 自主泊车架构设计
本文提出的自主泊车系统架构如图1 所示,主要包含停车场拓扑地图、自主泊车路径规划和决策控制3 大关键模块。停车场拓扑地图为路径规划提供可充电车位的几何参数、高精度道路节点坐标与节点之间的拓扑关系。路径规划模块则基于地图与自车定位信息,规划出车辆当前位置到指定车位的完整自主泊车路径。自主泊车决策控制模块通过分层调用相关子单元,计算当前功能下的转向、挡位、驱动和制动控制指令,进而由车辆的控制执行单元接收并执行,最终实现自主泊车。
为保证自动充电装置的精准对接,本文中为自主泊车扩展了精准调节功能,如图2 所示。车辆运行模式被划分为8 个阶段,分别以S1 ~S8 表示。其中,常规的自主泊车流程为S1 ~S4 阶段,精准调节流程为S5~S8 阶段。在泊车停止(S4)阶段后,若车辆横、纵向偏差满足了自动充电所需的精度要求,则系统终止;否则启动精准调节,通过前进方向与倒车方向的车辆运动控制,利用有限次数的精准调节,保证自动充电装置的对接精度与对接成功率。
为扩展精准调节功能,本文中将图1 中的自主泊车控制系统设计为分层共用的架构形式。系统首先依据参考路径与自车定位信息决策车辆运行模式,进而根据当前车辆运行模式(如S3),分别调用并组合分层系统中预瞄单元、横向控制单元、纵向控制单元的相关子单元(如图 1 中的 Y1、H2、Z1、Z2 和Z3),以实现当前模式下的具体功能。
2 基于预瞄视角的单点预瞄方法
单点预瞄方法作为路径跟踪的基础,应用于自主泊车的S1 和S3 阶段。虽然在小曲率路径下,单点预瞄方法[15-16]能够求得合理的预瞄参考点,但应用于停车场内的大曲率路径时可能存在预瞄参考点求解不合理,甚至无法求解的特殊情况。因此本文在单点预瞄方法的基础上引入了预瞄视角,确保在特殊情况下仍能求解合理的预瞄参考点,进而得到横向位置偏差与航向角偏差。
2.1 基于预瞄视角的单点预瞄模型
首先,对基于预瞄视角的单点预瞄模型做以下定义,如图3 所示。
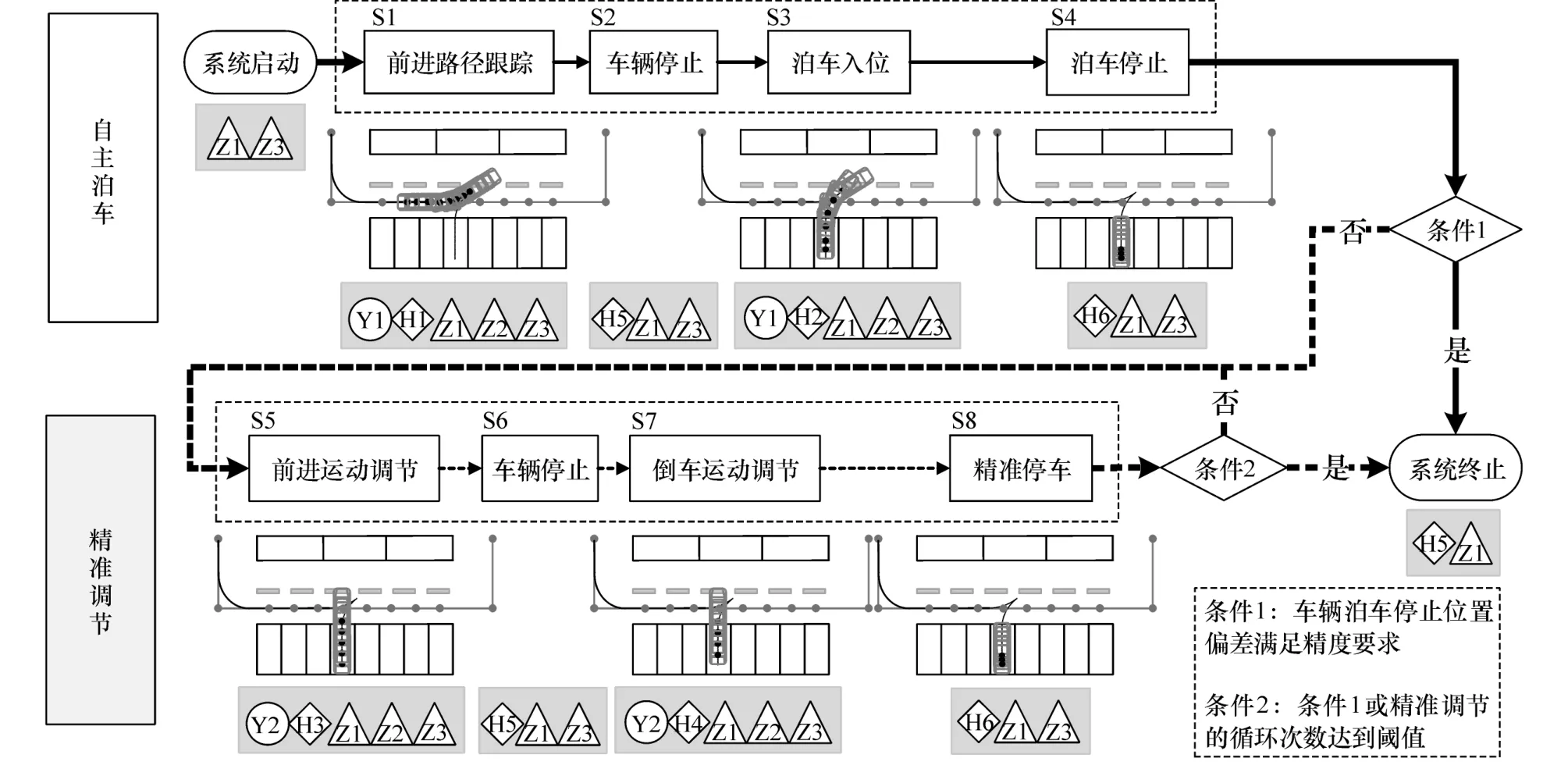
图2 自主泊车与精准调节流程
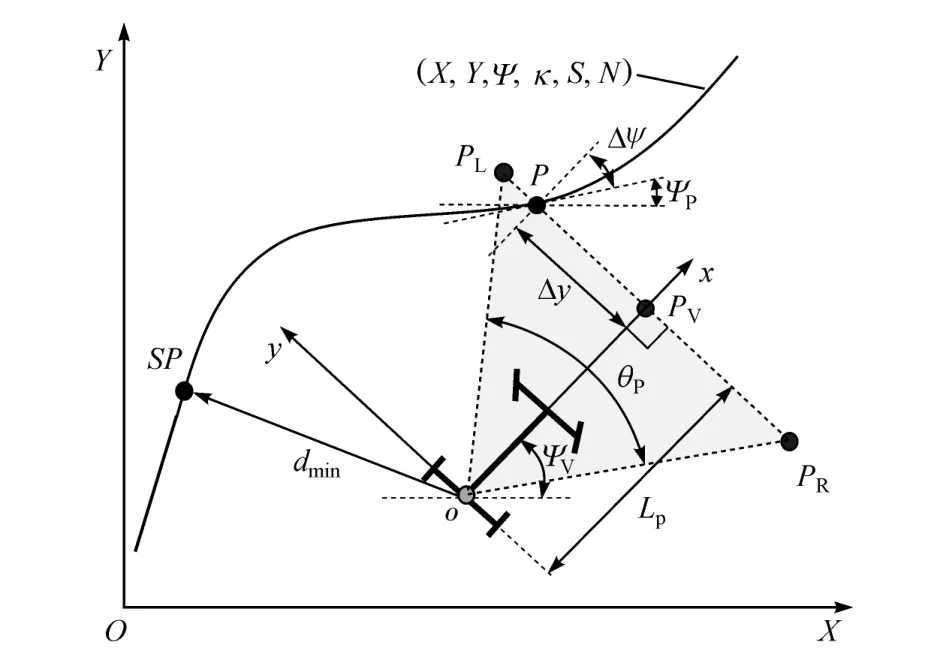
图3 基于预瞄视角的单点预瞄模型
定义全局坐标系为XOY,车辆坐标系为xoy,将后轴中心o作为自车参考点。参考路径的离散描述形式为(X,Y,Ψ,κ,S,N),分别表示横坐标、纵坐标、路径航向角、路径曲率、累积长度(从路径起始点至当前点)和路点序号,其中路径航向角定义为沿当前可行驶方向的路点切线方向与X轴正方向之间的夹角,范围为[0,2π)。预瞄参考点P为(XP,YP,ΨP,κP,SP,NP),点SP为参考路径上距离点o最近的点,最小距离为dmin。LP为从点o沿x轴方向的预瞄距离,θP为预瞄视角,PV、PL与PR分别为预瞄前视点、预瞄左极限点和预瞄右极限点。Δy和Δψ分别为预瞄参考点相对自车参考点o的横向位置偏差与航向角偏差。当车辆倒车运动时,预瞄范围与相关点沿车辆坐标系x轴的负方向表示。
基于以上定义,可通过预瞄视角θP与预瞄距离LP限制预瞄的范围,如图3 中的阴影区域所示,即
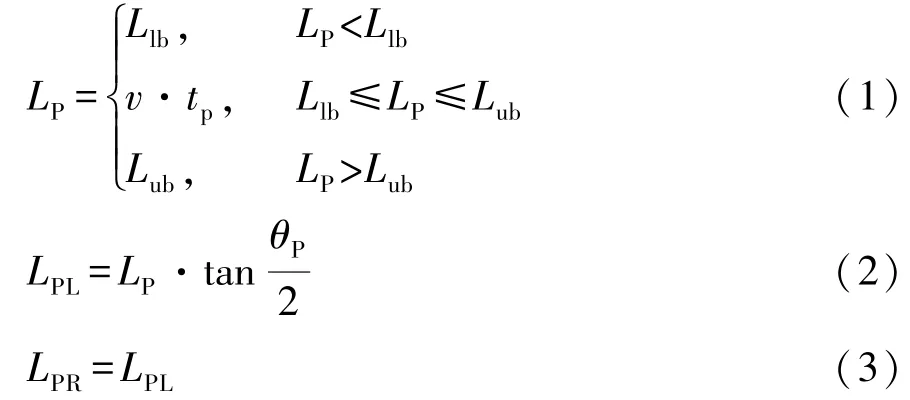
式中:Lub为预瞄距离上界;Llb为预瞄距离下界;v为车速;tp为预瞄时间;LPL为点 PV到 PL的长度;LPR为点PV到PR的长度。
然后通过路点检索与插值求解得到预瞄参考点P,将全局坐标系下的P点位姿[XP,YP,ΨP],经过旋转与平移,转化为车辆坐标系xoy下的P点位姿[xP,yP,ψP],即
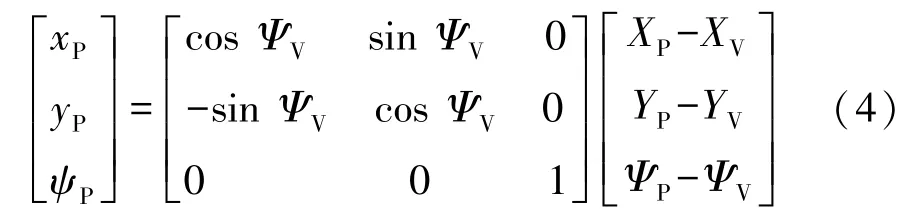
式中:XV为全局坐标系下自车参考点的X坐标;YV为全局坐标系下自车参考点的Y坐标;ΨV为全局坐标系下车辆的航向角,范围为[0,2π)。
结合图3 中的几何关系,可知:

最后,可得到用于车辆横向控制的Δy与Δψ,其解析式为

2.2 特殊情况分析
单点预瞄方法在大曲率路径下,检索预瞄参考点时可能存在检索异常点与检索失效的问题,如图4 所示,图中Pe点为检索异常点。因此,提出基于预瞄视角的两点匹配方法解决该问题。首先利用预瞄极限点PL与PR匹配距离路径的最近点Prl与Prr,如式(8)所示;然后将两者对应的路点序号Nrl、Nrr与上一时刻的预瞄参考点的路点序号NP,k-1进行比较,选取路点序列最大的点作为当前时刻的预瞄参考点,如式(9)所示,以避免预瞄参考点前后跳变。
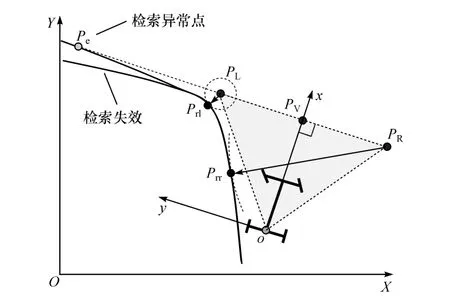
图4 检索时的异常点与失效情况

同时,以路点表示的参考路径在预瞄参考点检索时,现有算法通常从SP点开始检索,直至找到预瞄参考点。但对于仅由两点描述的直线路段,存在SP点在预瞄参考点P之前的情况,单一的前向检索将导致检索失效。而对于路点稠密的曲线路段,SP点至P点之间的检索范围较大,会产生过多的无效运算。因此,针对该问题,本文中使用预瞄前视点PV匹配最近路点作为起始检索点SCP,如图5 所示,在比较车辆坐标系下的SCP点横坐标xSCP与LP之间的数值大小后,再决定检索方向。
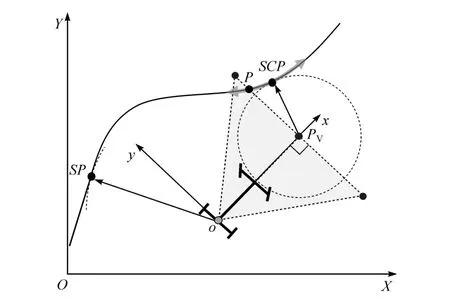
图5 基于SCP 点匹配的双向检索示意图
最后,预瞄参考点的检索求解流程如图6 所示。首先在预瞄参考点检索阶段确定检索方向,然后找到预瞄参考点所在的前后路点Pi与Pj,最后在满足预瞄视角的情况下,通过线性插值求解的交点,获得预瞄参考点P,否则利用基于预瞄视角的两点匹配方法得到预瞄参考点P。图中,xSCP为SCP点在车辆坐标系下的横坐标;NSCP为SCP点的路点序号;Ne为参考路径末点的路点序号;ncr为参考的检索点数量;nc为实际的检索点数量;(xi,yi)为路点Pi的坐标;(xj,yj)为路点Pj的坐标。
3 自主泊车精准调节策略
车辆位姿的准确测量与估计和执行机构的精准响应是实现自主泊车精准调节的前提。传统的自动泊车因受到传感器精度限制,需考虑车辆相对位姿的测量与估计方法;而自主泊车可以利用高精度地图与定位获得满意的测量精度,因此本文对自主泊车的精准调节方法进行研究,以提高自动充电系统的对接精度与对接成功率。
考虑车位空间对精准调节的约束,将所提的FORLPD 精准调节策略应用于如图2 所示的S5 ~S8阶段。该策略利用前进运动调节、倒车运动调节与精准停车3 个主要环节,在车位宽度范围内,调整车辆泊车入位完成后的车辆停止位置偏差。
首先,前进运动调节仅对航向角偏差进行控制,为倒车运动调节提供较好的车辆初始姿态,如图7(a)所示。然后,倒车运动调节仅对横向位置偏差进行控制,保证车辆的横向位置精度,如图7(b)所示。横向控制采用了基于单点追踪的预瞄方法,将预瞄参考点固定为参考路径的末点。根据车位坐标系XPSOPSYPS下P点的位置和方向,将其转换至全局坐标系中,利用式(4)~式(7)求解Δy与Δψ,用于精准调节的横向控制。

图6 基于预瞄视角的预瞄参考点求解流程图
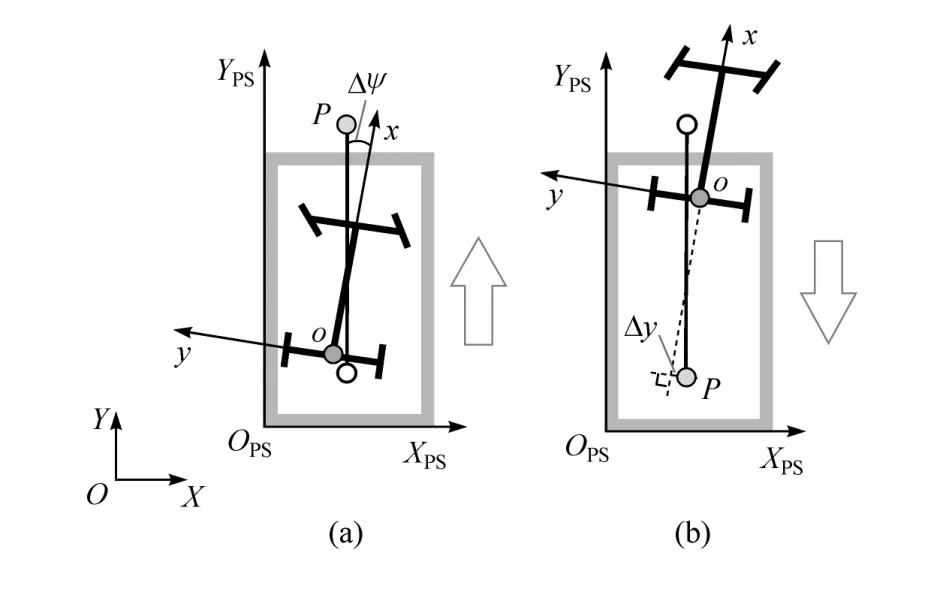
图7 FORLPD 精准调节策略示意图
精准停车控制根据制动距离调整车辆的纵向位置偏差。其中停车距离的指标选取尤为关键,如图8 所示,o为自车参考点位置,xgogyg为参考路径末点的坐标系,(xpg,ypg)为路径末点坐标系下自车的坐标,dpg为自车至路径末点的欧式距离,Spg为自车至路径末点的剩余里程,Rc为开始检测制动距离的半径范围。
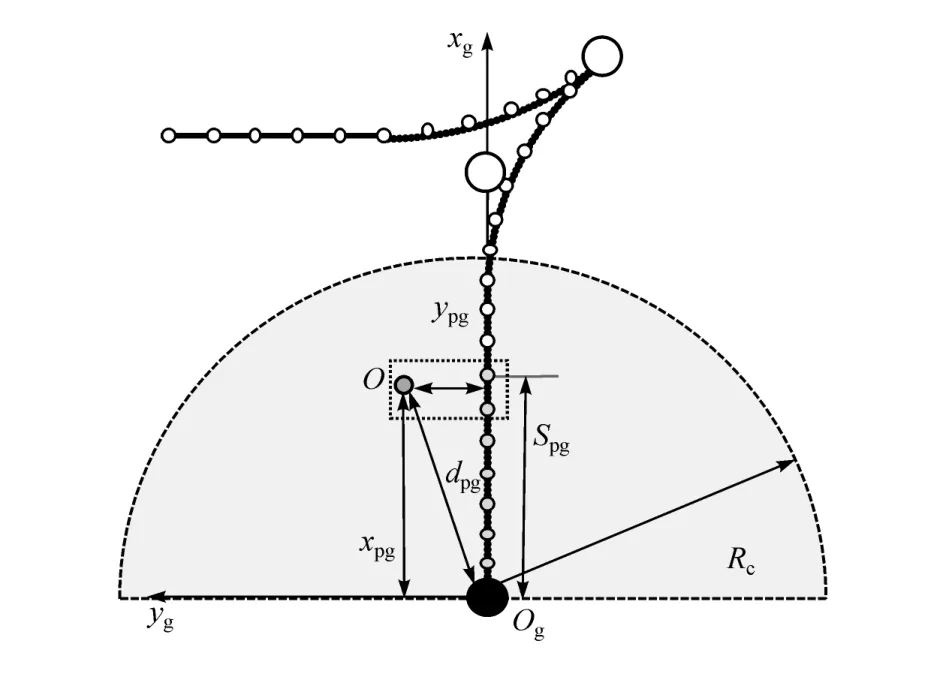
图8 停车距离判定指标
若仅使用欧式距离dpg,在直线参考路径下可能导致制动时机滞后,而在曲线参考路径下会使制动时机提前;若仅使用剩余里程Spg,则在路点稀疏的参考路径下会导致里程跳变;若仅使用xpg,在直线参考路径下精确,但对曲线参考路径不适用。因此,依据实际情况选择合理的停车距离指标才能获得理想的制动启动时机,实现纵向停车精度的有效调节,图8 中的判定指标通过式(10)~式(12)计算。本文中仅研究垂直泊车的情况,精准停车阶段的参考路径为直线,因此选用xpg作为停车距离指标。
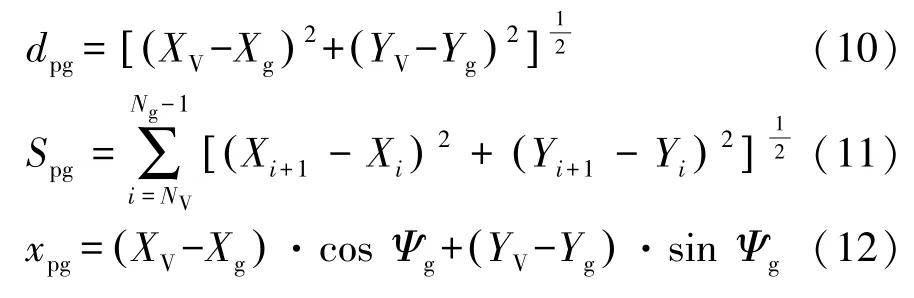
式中:(Xg,Yg)为全局坐标系下路径末点坐标;Ψg为全局坐标系下路径末点的航向角;NV为距离车辆参考点最近的路点序号;Ng为路径末点的序号。
4 实车试验
4.1 软硬件平台
为验证自主泊车精准调节策略的有效性,结合本文的理论方法设计了自主泊车控制系统,系统框图如图9 所示。该系统由车辆运行模式决策模块根据xpg、Spg和dpg判断当前车辆运行模式;预瞄单元、横向控制单元与纵向控制单元依据运行模式激活对应模块;其中,不同模式下横向控制器的转向角速度约束不同,纵向控制单元需要的部分反馈信号是指与纵向控制相关的信号,如轮缸压力。横向位置偏差控制器与航向角偏差控制器均采用PD 控制,纵向车速采用基于规则的控制。
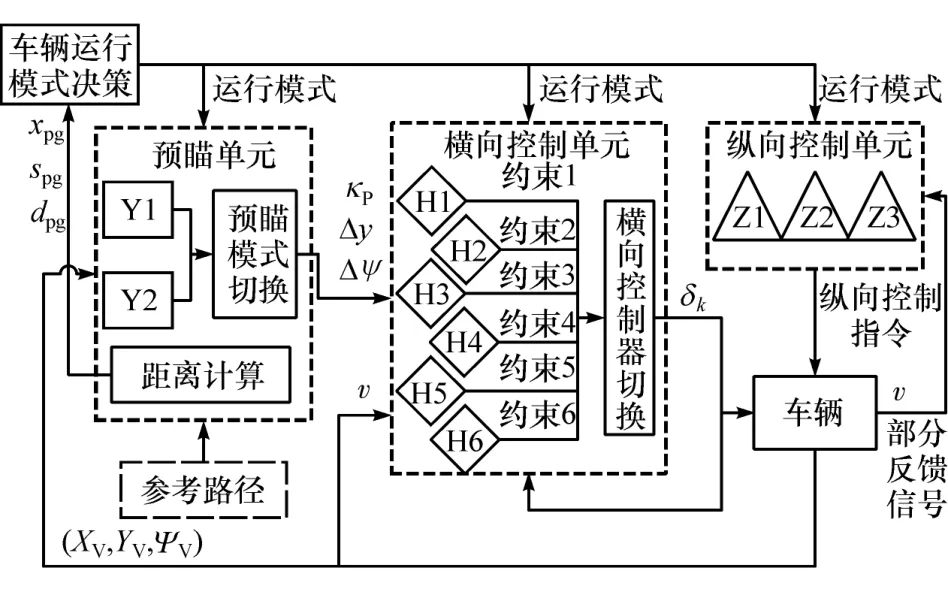
图9 自主泊车控制系统框图
首先基于图9 所示的软件系统框图,在Matlab/Simulink 环境下搭建自主泊车系统的软件模型,并将模型编译下载至MicroAutoBox 作为自主泊车控制器,试验时通过ControlDesk 实现人机交互功能。然后搭建如图10 所示的实车验证平台,该平台在北汽新能源EU260 车型的基础上,通过改造具备了线控转向、驱动和制动能力。采用具有厘米级定位精度的RTK 定位方式,车端配置联适R60S-U 接收机与双卫星天线,地面搭建联适R30S 基站与电台。车辆同时配备了SICK 单线激光雷达、MicroAutoBox(ds1401)、CAN case 和监控平台。试验场地为GPS 信号良好的室外停车场,如图11 所示。
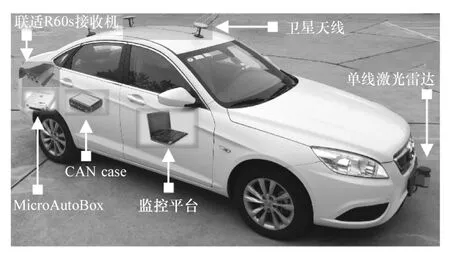
图10 实车试验平台

图11 室外停车场
EU260 电动汽车相关参数如表1 所示,实车试验时的预瞄参数如表2 所示。
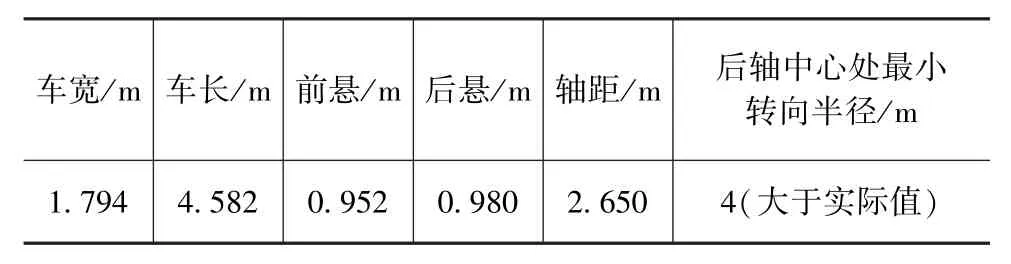
表1 车辆相关参数
表2 预瞄模型参数
4.2 评价指标
针对精准停车阶段的车辆停止位姿精度,设计评价指标。首先,建立精准调节参考路径末点的坐标系,评价指标定义为Δxs、Δys,分别表示车辆停止位置的纵向、横向偏差,如图12(a)所示。然后,定义泊车入位、第1 次精准调节、第2 次精准调节之后的精准停车评价指标,分别为 Δxs1、Δys1、Δxs2、Δys2、Δxs3、Δys3,且将纵横向偏差处于-0.15~0.15 m 范围内定义为精准泊车。最后定义自主泊车过程中的评价指标,如图12(b)所示,通过匹配距离车辆后轴中心的最近路点,建立路点坐标系xroryr,车辆后轴中心在路点坐标系下的横坐标和航向角分别定义为泊车过程中的横向偏差Δyr与航向角偏差Δψr。
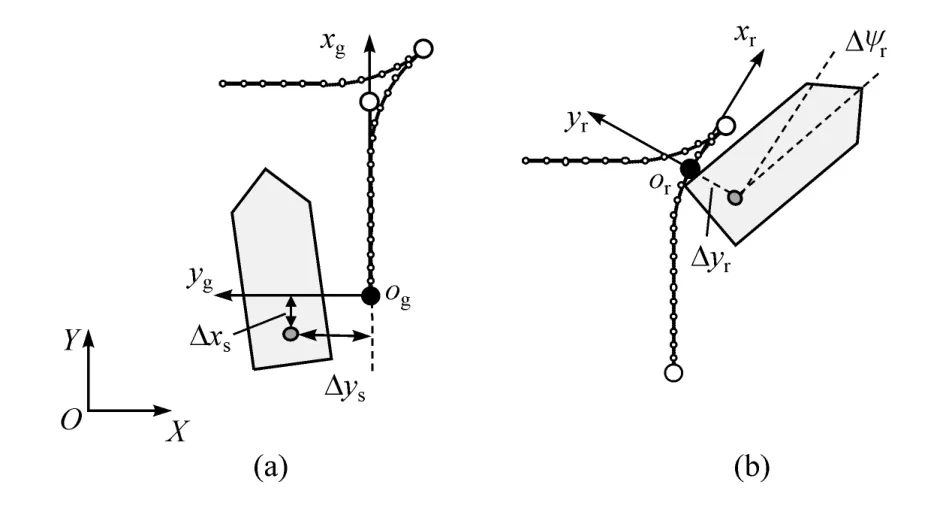
图12 评价指标的定义
4.3 试验结果分析
针对停车场内的不同车位进行了11 次自主泊车实车试验,整体的轨迹情况如图13 所示,包含了C 型与人字型垂直泊车,以及左侧与右侧泊车的情况。
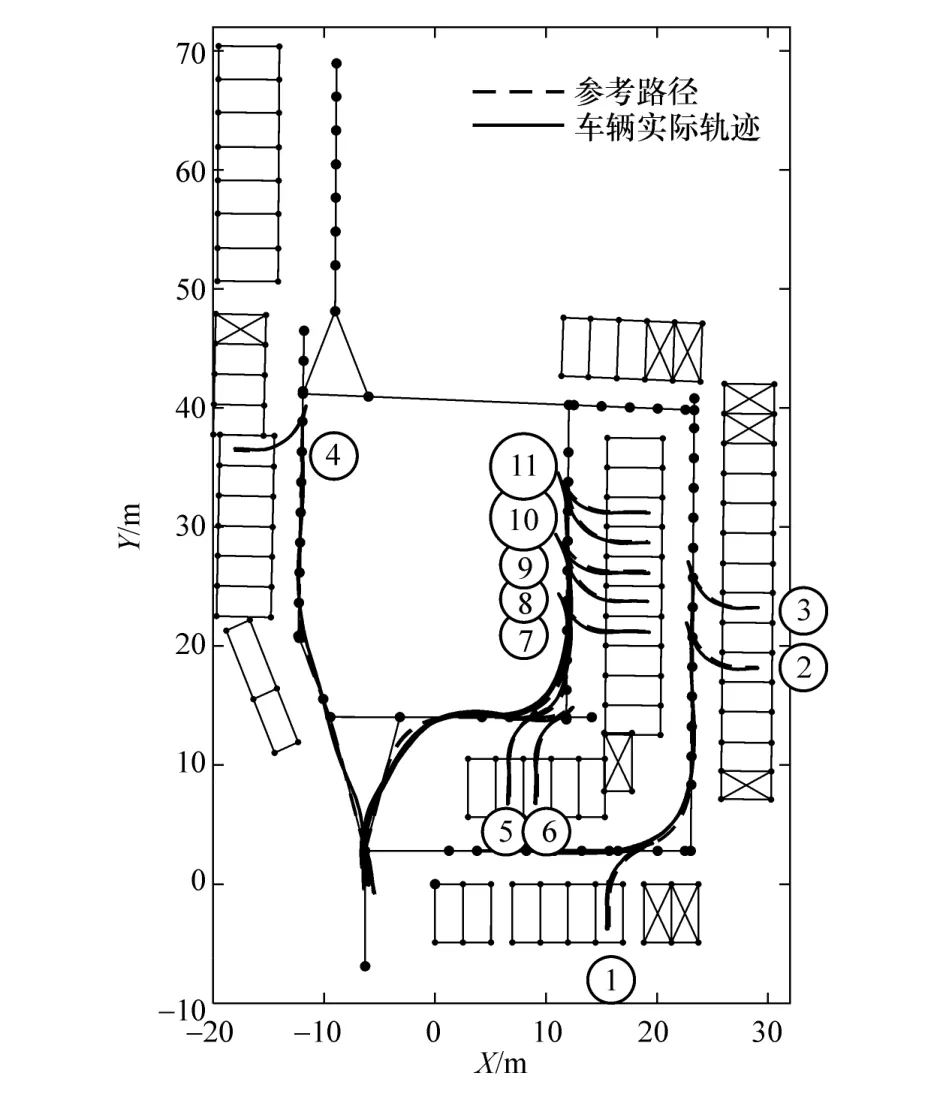
图13 自主泊车实车试验结果
为验证系统架构的合理性与系统工作流程的可行性,对5 号车位的自主泊车与精准调节过程进行分析。图14 描述了车辆的位姿轨迹,可以看出所设计的系统能够完整实现自主泊车与精准调节过程,但由于初始时车辆的位姿偏差较大,因此在前进路径跟踪阶段车辆的跟踪误差较大。由图中放大处可知,经过一次精准调节,车辆的横向位置偏差明显减小。
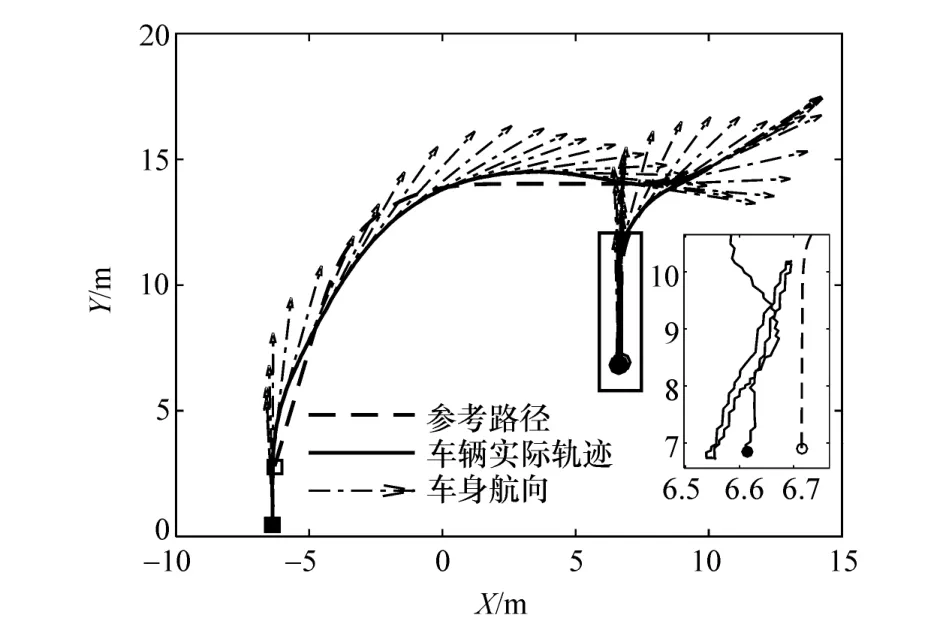
图14 5 号车位的自主泊车轨迹
图15 描述了全局坐标系下,车辆的纵横向位置与车身姿态随时间t的动态变化情况。S1 ~S8分别对应图2 中的不同阶段。图16 描述了转向盘转角控制指令δ与车速v随时间的变化情况,可以看出在S1 阶段,通过较大的转向盘转角调节车辆横向位置偏差,并最终趋于稳定;在精准调节阶段,结合图15 可以看出,此时车辆的纵向坐标和航向角变化较小,通过小角度的转向控制,能够使车辆在狭小的车位空间中调整位姿。速度控制方面,在S1 阶段距终点15 m 范围内,车辆开始以1 m/s的参考车速降速运行,但速度控制的波动较大。在S3 ~S8 阶段,车辆的行驶路径长度较短,以起步与制动过程为主,不易保持匀速,因此稳定的低速控制方法有待提高。

图15 车辆动态轨迹变化
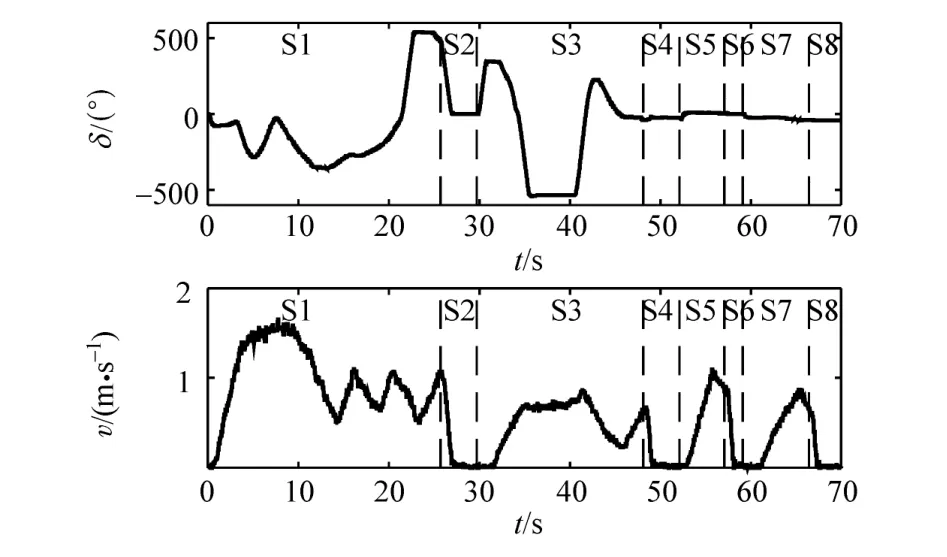
图16 转向盘转角控制指令与车速控制变化
图17 描述了车辆横向位置偏差Δyr与航向角偏差Δψr的变化情况,在S1 阶段,横向位置偏差与航向偏差分别达到了-0.58 m 与0.325 rad,导致车辆的控制效果并不理想,但最终在S2 阶段收敛。泊车入位阶段横向位置偏差从-0.27 收敛至0.16 m,并经过精准调节后达到0.10 m;航向偏差最大达-0.173 rad,并最终收敛至0.037 rad,表明泊车控制与精准调节横向控制效果良好。图中S2 阶段模式发生切换,使得偏差输出跳变为0,同时因参考路径发生切换,导致模式切换后的偏差值存在稍许差异;S4 过渡至S5 时也存在相同情况。
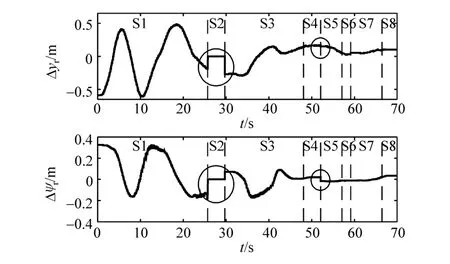
图17 自车的横向位置偏差与航向角偏差
4.4 统计结果分析
为说明所提精准调节策略应用于不同车位的有效性,基于4.1 节中提出的评价指标,将11 次不同车位的试验结果进行了横向对比,不同车位试验时的精准调节次数如表3 所示。可以看出其中未触发精准调节模式,在泊车入位阶段直接达到泊车精度的次数仅占55%,因此有必要加入精准调节功能。

表3 精准调节次数统计
图18 描述了纵向位置偏差的变化情况,通过精准调节,纵向的精度均控制在0.15 m 的精准范围内。但对于初始纵向精度较好的试验,存在纵向偏差稍许增大的情况,原因在于精准停车在匀速的假设条件下依据距离判断,但实际当中难以实现极低速下的匀速控制,故进入制动的速度有所不同,导致高精度制动距离不易保证。
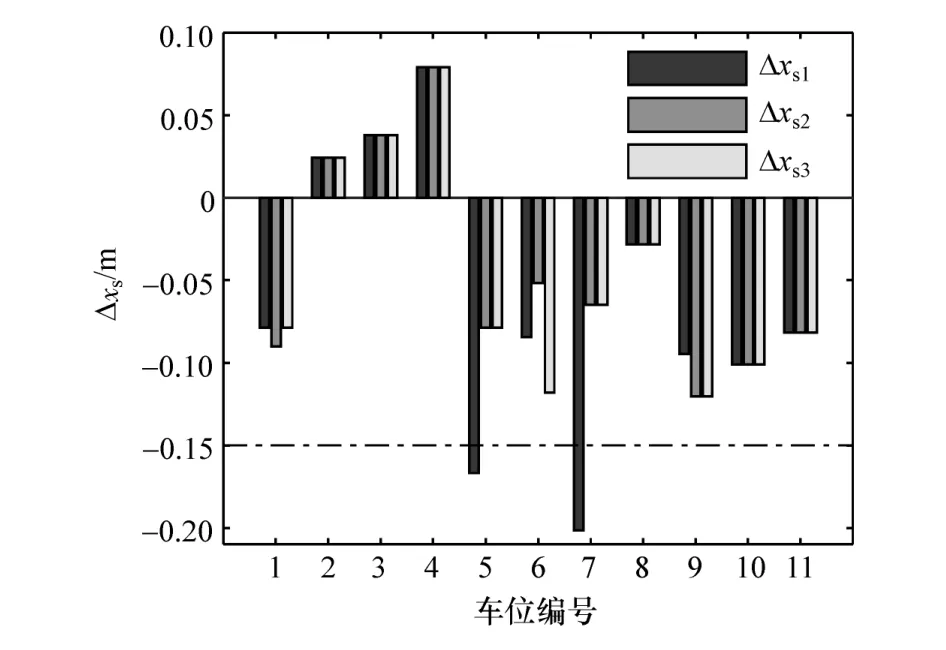
图18 精准停车后的纵向位置偏差变化
图19 描述了横向位置偏差的变化情况,通过精准调节,该偏差均控制在0.15 m 范围内,且多次调节后的精度更高,说明FORLPD 精准调节策略对横向位置偏差具有良好的调节作用。
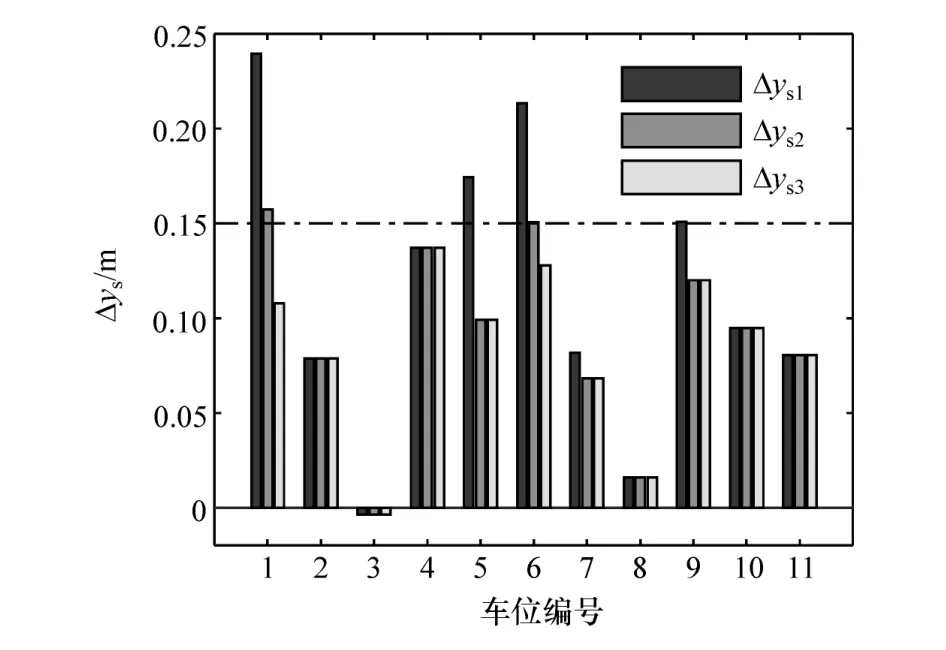
图19 精准停车后的横向位置偏差变化
由图18 和图19 可以看出,通过精准调节,全部试验均实现了偏差在0.15 m 范围内的精准泊车,有效保证了自动充电装置的对接精度与对接成功率。为量化试验指标,对表3 中触发了精准调节的5 次试验结果进行统计对比,如表4 所示。精准调节后的纵横向位置偏差值相比调节前的偏差值在最大数值MAX、最小数值MIN、均方根值RMS 和总体标准差σ4 个方面均有所降低。其中,纵向位置偏差的RMS 从0.13 降至0.09 m,减小了 30.8%;横向位置偏差的 RMS 从0.18 降至0.11 m,减小了38.9%。可以看出相比常规自主泊车,在加入精准调节功能后,车辆的泊车停止位置偏差能够得到有效降低,使其达到精度要求。此外,纵向位置偏差的总体标准差σ从0.05 降至0.02 m;横向位置偏差的总体标准差也从0.05 降至0.02 m,说明了偏差的离散程度均有所降低,精准调节的效果稳定。
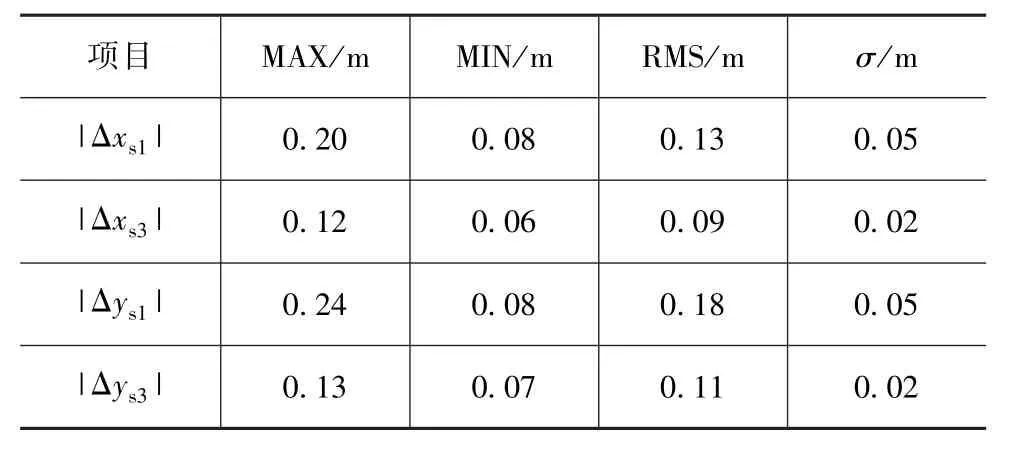
表4 泊车入位与精准调节的偏差对比
5 结论
针对自主泊车结合自动充电时,面临自动充电装置对对接装置精度的高要求,本文中为自主泊车加入了精准调节功能,并提出了FORLPD 精准调节策略。相比常规自主泊车,在加入精准调节功能后,车辆的泊车停止位置偏差得到有效且稳定地降低。
在单点预瞄方法的基础上,分析了大曲率路径下,检索预瞄参考点时可能出现的异常点与失效情况,通过基于预瞄视角的两点匹配与基于预瞄前视点的双向检索解决了该问题,提高了预瞄算法的完备性。
