防暴弹定高空爆控制系统研究
2021-01-12庄维伟刘加凯潘国强张金涛
庄维伟,刘加凯,潘国强,张金涛
(1.武警部队装备部军事代表局, 北京 100045; 2.武警工程大学装备管理与保障学院, 西安 710086)
防暴弹药主要包括催泪弹、爆震弹、染色弹等多个类型。近年来,防暴弹药已作为武警部队维权执法等行动中的有效打击手段被广泛使用。由于海警部队执行任务的场所通常在海上(或水上),传统落地后发火的防暴弹药无法正常发挥作用,空爆式防暴弹越来越受青睐。然而当前的空爆式防暴弹一般采用火药延期的方式实现空爆或空中开仓,由于火药的延期特性不稳定,使得防暴弹爆炸、开仓高度存在较大的分散,非致命效应难以保证,战术效能不易把握,并且作用距离局限性明显、灵活性较差[1-2]。
因此,本文开展了基于舰载防暴弹发射平台的定高空爆控制系统的研究,该系统采用智能控制的方式实现舰载发射防暴弹定高空爆或定高开仓,对目标实施有效的打击,其作用效果如图1所示。
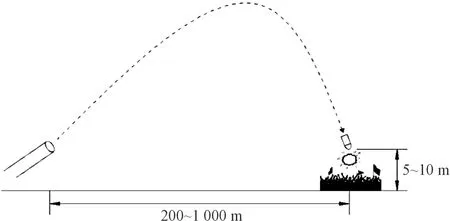
图1 防暴弹定高空爆控制系统作用效果示意图
1 定高空爆控制系统的结构原理
该系统主要由发射器控制装置和弹丸信号接收装置组成。其中发射器控制装置安装在防暴弹发射器上,由激光测距模块、速度传感器模块、倾角传感器模块、单片机控制模块、无线发射模块组成;弹丸信号接收装置安装在弹丸头部,主要由无线接收模块、单片机控制模块和点火模块组成;弹丸装药系统包括防暴药剂、发射装药等。防暴弹定高空爆控制系统的整体结构示意图如图2。

图2 防暴弹定高空爆控制系统结构示意图
防暴弹定高空爆控制系统的工作原理如图3所示。弹丸发射前,利用激光测距模块测量目标距离;弹丸发射瞬间,利用速度传感器模块和倾角传感器模块分别对弹丸发射时的初速和倾角进行测量,并将测量到的这两个数值传送给控制模块进行处理获得弹丸飞行的外弹道信息,得到弹丸从发射到飞行至距离目标地面5~10 m处所需的起爆时间,并将时间信息利用电磁感应装定模块装定于防暴弹上;弹丸接收到装定信息后开始计时,到达起爆时间后,经由单片机控制模块处理,引爆点火模块,使弹丸在距离地面5~10 m处爆炸,达到较好的作用效果。

图3 定高空爆控制系统工作原理框图
定高空爆防暴弹改变了传统防暴弹的作用方式,与现有防暴弹相比,定高空爆防暴弹具有以下明显的优势:① 弹药空爆,作用效果好;② 非致命效应突出,安全性高;③ 采用定高控制技术,定高控制精度高;④ 射程远,有效威力幅员面积大;⑤ 实现了精确测距、自动解算弹道、自动装定空爆信息,具备信息化、智能化特点。
2 防暴弹外弹道特性仿真分析
对于防暴弹定高空爆系统来说,必须充分掌握防暴弹药的外弹道运动轨迹及飞行时间特性,得到弹丸飞行至距地面5 m处所需要的时间,才能实现对弹药的空爆时机的精确控制。
2.1 外弹道数学模型
本文以64 mm空爆式防暴弹作为研究对象,根据质点运动规律建立弹丸的质心运动矢量方程。在建立防暴弹外弹道模型中,作以下基本假设[3-4]:
① 弹丸为理想的轴对称体;
② 弹丸飞行过程中攻角δ= 0;
③ 地表面为平面,重力加速度g的方向竖直朝下,其值g= 9.8 m/s2;
④ 标准气象条件;
⑤ 忽略地球自转引起的科氏速度;
⑥ 带膛线发射器,克服弹丸射出后空中翻转。
由于弹丸为理想的轴对称体,可将弹丸的运动看作其质心的运动。弹丸在飞行过程中受重力g和迎面空气阻力Rx的影响[5],其质心运动轨迹如图4所示。
根据图4的数学关系及外弹道理论,得到x轴和y轴的加速度分量的数学表达式为
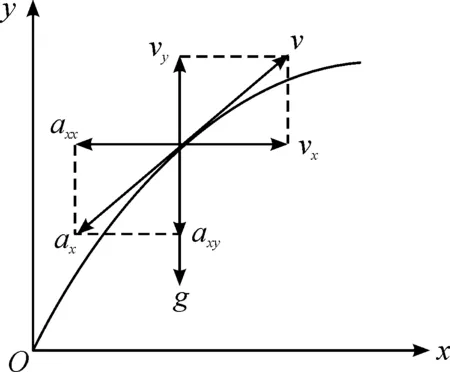
图4 弹丸质心运动轨迹示意图
-cbH(y)G(v)vx
(1)
-cbH(y)G(v)vsinθ-g=
-cbH(y)G(v)vy-g
(2)
式(1)和式(2)中:ax为空气阻力加速度矢量;axx为ax在x轴的阻力加速度分量;axy为ax在y轴的阻力加速度分量;g为重力加速度;v为弹丸飞行的速度;vx为v的水平分速度;vy为v的竖直分速度;θ为弹道倾角;cb为弹道系数;H(y)为空气密度函数;G(v)为阻力函数。
由式(1)和式(2)以及运动学公式,可建立以时间t为自变量的弹丸质心运动微分方程组为[6]
(3)
式(3)中:初始条件为t=0时,x= 0,y= 0,vx=vcosθ,vy=vsinθ。
2.2 外弹道仿真及结果分析
在式(3)中,由于变量较多,本文利用MATLAB进行仿真求解,得到弹丸的外弹道飞行轨迹,并计算得出弹丸飞行至距地面5 m处所需要的时间。
由经典外弹道理论[7]可知,当弹丸的初速、倾角和弹道系数确定后,即可得到唯一的一条弹道曲线。根据空气阻力定律[8],可得到弹丸的弹道系数cb为
(4)
式中:i为弹形系数;d为弹丸直径;m为弹丸质量。对于弹丸直径为64 mm的64 mm空爆式防暴弹,设定弹形系数i=1.3,弹丸质量m=1 kg,由此可得出其弹道系数cb=5.32 kg/m。
在MATLAB仿真过程中,把初速和射角作为自变量,对其外弹道飞行轨迹和时间特性开展仿真分析。64 mm防暴弹利用防暴弹发射器进行发射,根据其速度和发射倾角特点,选取两种条件开展外弹道仿真分析:第一种条件为弹丸初速v=80 m/s,倾角θ范围为10°~50°;第二种条件为:弹丸初速v=100 m/s,倾角θ范围为10°~50°。图5和图6分别为两种条件下仿真得到的防暴弹外弹道的时间-倾角-弹道高度三维仿真图。

图5 初速为80 m/s条件下的外弹道仿真曲线
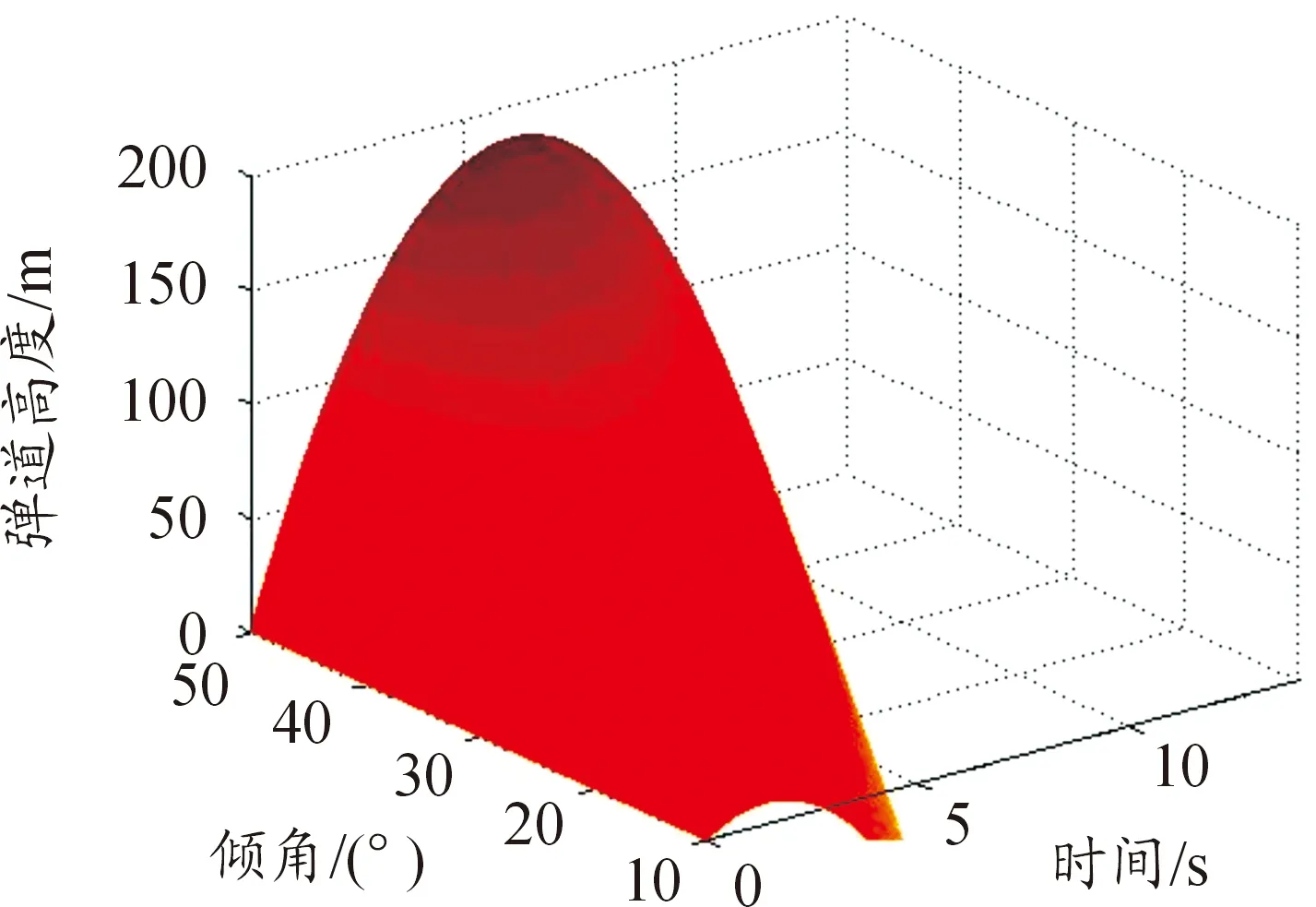
图6 初速为100 m/s条件下的外弹道仿真曲线
利用Workspace进行数据查询可知,在两种仿真条件下,弹丸飞行至距离地面5 m处所需要的时间如表1所示。
表1 不同条件下的弹丸飞行时间
由表1可知:① 在阻力、初速等参数确定的条件下,倾角不大于45°时,倾角越大,弹丸飞行至距地面5 m所需的时间和弹道高度随之增大;② 在倾角相同的条件下,初速越大,弹丸飞行至距地面5 m所需的时间和弹道高度也随之增大。
3 定高空爆控制系统性能测试试验
在掌握了弹丸外弹道飞行轨迹后,本文完成了防暴弹定高空爆控制系统的硬件电路设计和软件程序编译,并加工了定高空爆控制系统的原理样机,如图7所示。对原理样机进行了初速、倾角以及起爆时间值的测试计算。
图7 定高空爆控制系统原理样机
测试情况如下:
1) 初速和倾角测试
测试目的:检测速度传感器和倾角传感器,测试初速和倾角的灵敏度和稳定性。
测试初速的方法和过程:利用两对红外光电管对初速进行测试,将陀螺仪摆到0°的位置,先触碰到右边的光电管,计时器开始计时,后触碰到左边的光电管,计时器停止计时,经单片机计算可得到发射时的初速度。
测试倾角的方法和过程:对倾角传感器进行测试,通过顺逆时针的旋转,以及不规则的平移等操作,观察其能否将角度定为30°,以及它的灵敏度如何,调整完的倾角数据可显示到OLED显示屏上。
2) 起爆时间测试
测试目的:检验单片机计算的时间值能否满足设计要求。
测试方法和过程:在实弹发射过程中,发射器的射角即为弹丸发射时的倾角,发射倾角范围在0°~90°。因此模拟实弹发射过程,先将倾角传感器调整到一个适当的角度,用上述方法测量出弹丸的初速和倾角,通过控制模块的计算,可得到起爆时间,利用感应装置将时间信息装定于弹丸,同时计时器开始计时,到达该起爆时间后,引爆弹丸。测试过程中,记录每一次速度、倾角和时间值。
3) 感应装定测试
本系统利用发光二极管来代替信号装定模块,当信号经感应装置装定成功后,LED灯闪亮,则表示信号成功接收。
通过对设计制造的防暴弹定高空爆控制系统原理样机进行测试表明,所设计的系统原理样机能够较好地实现对初速和倾角的测试、起爆时间的测量计算,部分计算数值如表2所列,起爆时间值与仿真结果误差基本可忽略不计,满足了设计要求。
表2 不同条件下的弹丸引爆时间值
4 结论
本文提出了基于舰载防暴弹发射平台的定高空爆控制系统研究,采用智能控制的方式实现舰载发射防暴弹定高空爆或定高开仓,对目标实施有效的打击。建立了弹丸质心运动的数学模型,利用Matlab软件对外弹道模型进行仿真计算,得到了不同初速和射角情况下弹丸飞行至距地面5m时所需的时间。在此基础上研制了定高空爆控制系统原理样机,开展了初速和倾角测试、起爆时间测试和电磁感应装定测试,所设计的原理样机能够较好地满足功能要求。本文所研究设计的基于舰载防暴弹发射平台的定高空爆控制系统改变了传统防暴弹的作用方式,能够有效遏制海上(或水上)大规模群体性事件的扩散和蔓延,提高了海警部队执勤处突的能力。
