基于Delphi-模糊Petri 网的航空发动机故障诊断
2021-01-12张光宇张福光程继红
张光宇,张福光,程继红
(海军航空大学岸防兵学院,山东烟台264001)
0 引言
航空发动机为飞机或其他航空器提供动力来源,具有高度复杂与精密的特点。飞机整体的可靠性和经济性与航空发动机息息相关[1-2],未来的发动机还将使用综合智能化的数字电子控制系统[3],更会增加其复杂性。如何准确定位发动机的故障部位,判断故障原因,一直是其维修保障过程中的关键问题[4]。目前国内发动机故障诊断方法有神经网络法、深度学习法、模糊粗糙集法、支持向量机方法、软件仿真法等,针对不同类型故障有着各自特点。
Petri 网方法是德国科学家Carl Adam Petri 提出的1 种建模方法。对于进程或部件的顺序、冲突以及同步等关系,Petri 网方法比其他方法的描述更方便,并且其独有的运算方法的修改与改进更为便捷[5]。将Petri 网理论用于故障诊断目前在电网系统、工程液压系统、航空航天、高铁运输等领域中有很多应用实例,基于模糊Petri 网(Fuzzy Petri Net)的故障诊断方法将Petri 网与模糊理论相结合,将运算规则、置信度及变迁等模糊化,把知识表示和诊断推理融为一体[5]。Delphi 法是1 种传统的定性与定量相结合的研究方法,具有较好的综合性。
本文将模糊Petri 网的理论与Delphi 法相结合,用于航空发动机的故障诊断,讨论其故障诊断模型的建立及运算规则,并进行了实例验证。
1 针对故障诊断的模糊Petri 网
模糊Petri 网可以用来描述系统不确定性知识,是1 种较好的图形化建模工具[6],而故障诊断过程就是充满着模糊性及不确定性的过程,用模糊Petri 网来处理这种模糊规则的故障诊断事件,解决了传统Petri 网只能处理精确知识,无法处理现实事件中不确定性知识的问题[7]。
1.1 模糊Petri 网
在Petri 网中,有以下几个基本的构成要素[8]:
(1)用库所(Place)来表示状态,一般用圆表示。
(2)用变迁(Transition)表示事件或者转换过程,一般用矩形来表示。
(3)用流关系(Flow Relation)表示事件发生的条件,或者用弧(Arc)来表示库所与变迁之间的关系。
(4)标志(Token)一般用库所里的点来表示,或者直接写成数字,表示系统中的数据、状态或者资源。
以上要素构成了网(Net)的基本结构,如图1所示。
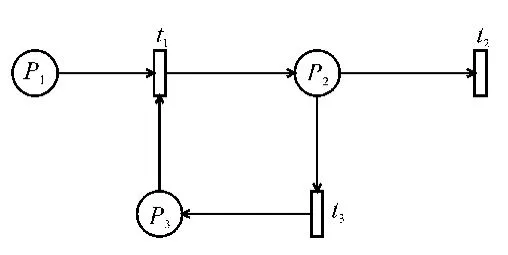
图1 基本Petri 网的结构
不同的文献在不同的应用背景下,对模糊Petri网给出过多种定义,将模糊式产生规则与基本Petri网的定义相结合,那么模糊Petri 网就有了如下的8元组[9]定义

式中:P={p1,p2,…,pn}为所有库所节点的有限集合;T={t1,t2,…,tm}为变迁节点的有限集合;α⊆(P×T)和β⊆(T×P)分别为库所到变迁和变迁到库所的流关系,在模型中也就是有向弧;I和O分别为变迁到库所的输入函数和库所到变迁的输出函数;μ∈[0,1]为库所为真或变迁发生规则的置信因子;θ为变迁规则发生的阈值,当变迁的置信度μ>θ时,变迁才会发生。
不同于传统Petri 网,模糊Petri 网并不存在并发与冲突的问题;库所内的标志的个数也只有0 或1 这2 种状态,这是因为在模糊Petri 网中,库所代表的是故障模式,只有故障不发生和故障发生2 种模式;同时在变迁上也多了1 个介于0 和1 之间的可信度。
1.2 模糊式产生规则
模糊式产生规则表示的是输入库所与输出库所的模糊关系,在故障诊断模型中即为故障事件与故障原因的1 种模糊关系,在这里采用在MYCIN 专家系统中的1 种推理方法,即基于可信度的不精确推理[8],主要包括以下几种[10-11]:
(1)基本型。如图2(a)所示。Ri:ifpi,thenpj(CFpi=μi),在该型规则下,变迁t 的前与后只有1 个输入库所与输出库所,输出库所的置信度μj=μi·μt,即输入库所的置信度μi与变迁的置信度μt的乘积。
(2)“与”型。如图2(b)所示。Ri:if p1and p2and…and pn,thenpj(CFpi=μi),在该型规则下,变迁有多个输入库所,但是只有1 个输出库所,输出库所的置信度,其中为μ1,μ2,…,μn的均值(i=1,2,…,n)。
(3)“或”型。如图2(c)所示。Ri:if p1or p2or…or pn,thenpj(CFpi=μi),在该型规则下,变迁t1到tn的输出库所都是pj,且每个变迁对应自身的输入库所,输出库所的置信度μj=max {μi·μti},即其中最大的置信度。

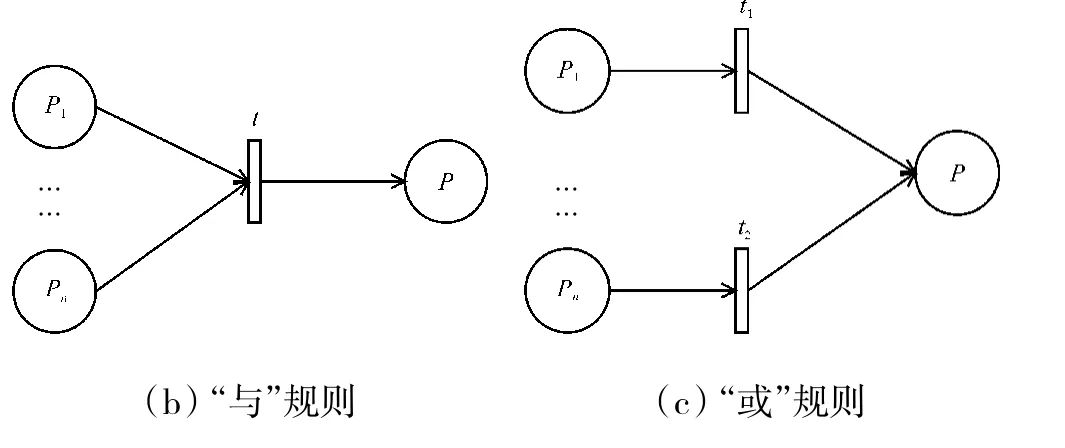
图2 模糊式产生规则
以上CF={μ1,μ2, …,μn} 为有限的规则置信度集合,置信度μi∈[0,1],在此范围内μi的值越大,表示库所代表的故障事件或者变迁代表的故障行为越有可能发生。
1.3 基于Delphi-模糊Petri 网故障诊断的推理过程
Delphi 法适用于没有精确资料的问题研究[12],综合性较强,常被用在预测及评价领域,但该方法具有主观性,将其与模糊Petri 法相结合,进行故障诊断问题的推理。
故障诊断的过程一般是对故障现象进行分析,推理出故障的具体原因及故障结论,也就是所谓的反向推理[13],找出所有可能导致故障发生的输入库所以及传播路径,并比较置信度大小,从而判断故障起始原因。
在Delphi-模糊Petri 网故障诊断方法中的推理过程[14]如下:
(1)根据实际故障情况进行分析,确定故障模式。
(2)采用Delphi 法,通过调查问卷的形式综合分析专家的观点及日常工作经验,确定置信度等定量数据。
(3)对库所的权重进行赋值。
(4)根据置信度μ 与阈值θ 的比较,选出导致最终故障的变迁规则置信度最大的库所。
(5)依次计算所有库所的概率,根据预先设定的初始置信度与模糊规则计算每个初始库所到最终库所的置信度,并与阈值θ 进行比较,若大于阈值,则命题成立。
(6)比较所有命题成立的库所置信度大小,按照置信度越大越优先的顺序排列,推理过程结束。
2 基于Delphi-模糊Petri 网的航空发动机故障诊断实例模型
在进行故障诊断时,如何尽快定位故障原因,减少不必要的冗余推理,并将各类故障的可能性尽可能排列出来,是Delphi-模糊Petri 网故障诊断方法要解决的问题。
2.1 航空发动机故障诊断实例描述
某型军用教练机现单发装备某型涡扇发动机。根据部队实际工作调研,在日常飞行过程或地面检查试车中,会出现最小滑油信号灯燃亮、滑油压力摆动过大、滑油压力超规定值等故障。由于滑油系统部件较多,滑油工作条件恶劣,发动机对滑油系统的要求又较为严格,给地勤维护保障人员的排故工作带来一定的挑战。
结合保障一线的实际情况,选取某型发动机滑油系统故障中的1 种:最小滑油信号灯燃亮,进行基于模糊Petri 网的模型构造。该故障关系如图3 所示。
从图中可见,造成最小滑油信号灯燃亮的3 个主要原因是滑油压力异常、压力传感信号异常和其他非典型故障(此类故障出现可能性小,多为意外故障)。滑油压力异常是指滑油在工作过程中压力确实超过了规定值,其原因主要包括滑油油量不足、滑油系统存在气塞、调压活门故障、滑油泵故障、滑油箱损坏;压力传感信号异常是指仅为信号问题,而滑油压力正常,其原因主要包括最小滑油压力信号器故障、温度与金属屑信号器故障、磁性堵塞或滑油滤有金属屑。
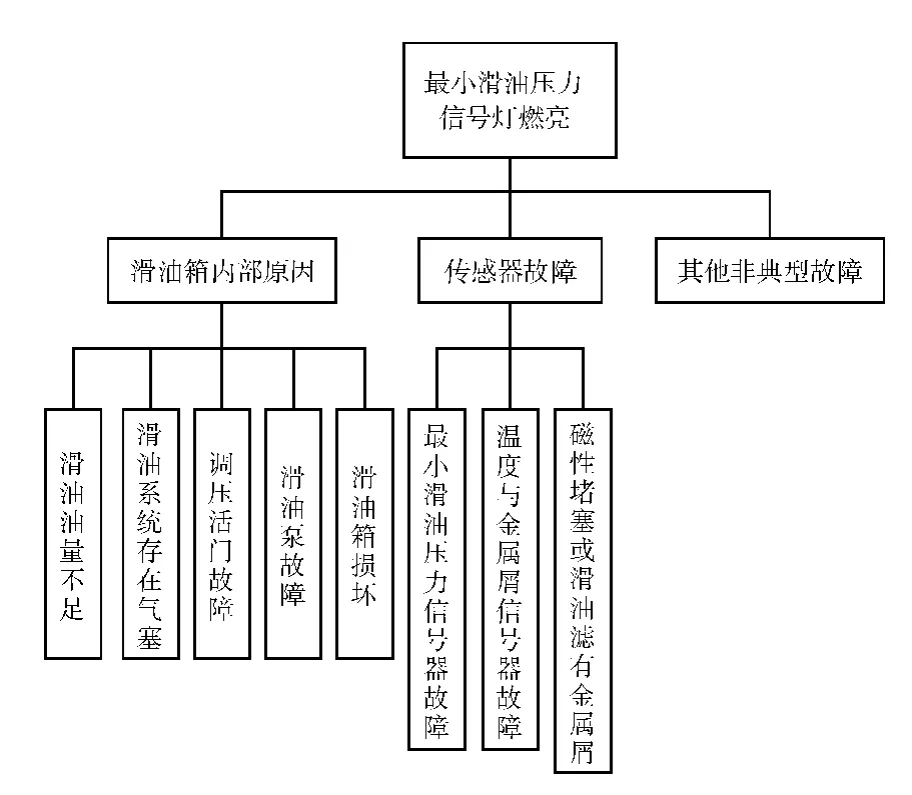
图3 故障关系
2.2 故障诊断模型建立与分析
在模型分析中,阈值的选取很关键,阈值定得过大,故障可能无法被检出,造成漏诊;而阈值定得过小,系统又容易产生误诊。根据该型发动机在实际使用过程中的滑油系统故障报告统计及FMECA 方法[15],结合Delphi 方法,按照文献[16]中的单因素确定方法的计算流程,制定出合理的故障检测阈值,选取故障阈值θ=0.6,其他各初始库所的置信度以及各变迁的置信度皆可由以上方法得出。
根据之前的故障分析与故障关系,结合模糊Petri网,用库所来表示故障模式,变迁表示故障行为,按照各类故障的从属关系建立起的故障诊断模型如图4所示。

图4 最小滑油信号灯燃亮故障诊断模糊Petri 网模型
模型中库所、变迁的含义以及置信度等见表1。
根据建立起来的模糊Petri 网模型,分析计算过程如下:
(1)p12为最终库所,也就是最小滑油压力信号灯燃亮,可知引发p12发生的路径有3 条,分别为p10→p12,p11→p12,p9→p12;属于它们的变迁规则的置信度里最大的为μt10=0.9,故优先选择路径p10→p12。
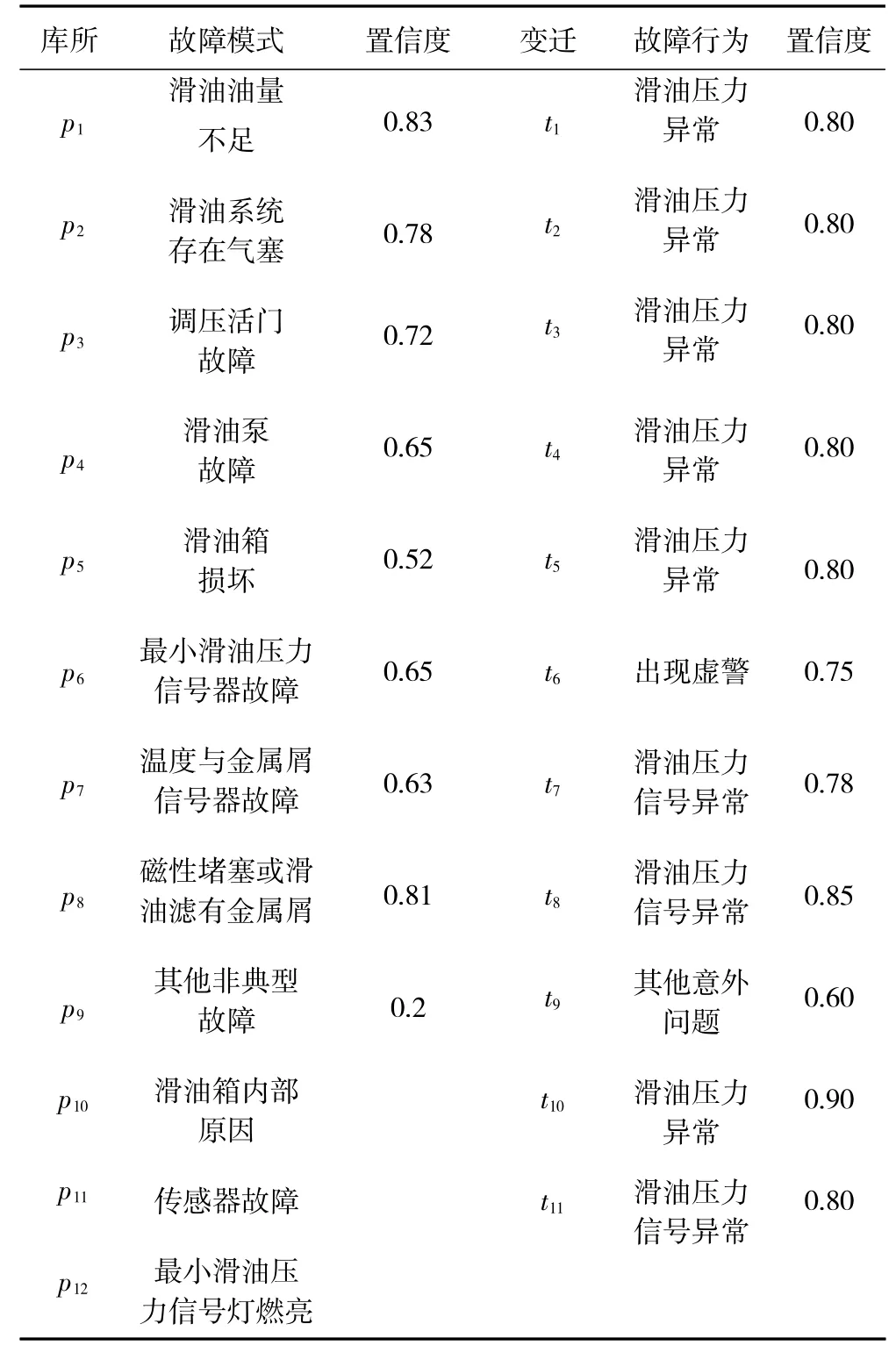
表1 库所、变迁含义及置信度
(2)再分别计算路径p1→p10,p2→p10,p3→p10,p4→p10,p5→p12的置信度分别为:μ1=μp1·μt1=0.664,μ2=μp2·μt2=0.624,μ3=μp3·μt3=0.576,μ4=μp4·μt4=0.52,μ5=μp5·μt5=0.416,可知μ1>μ2>θ,故变迁t1与t2会发生。
(3)再选择p11→p12路径,分别计算出p6→p11,p7→p11,p8→p11路径的置信度为:μ6=μp6·μt6,μ7=μp7·μt7,μ8=μp8·μt8;可以看到μ8>θ,故变迁t8会发生。
(4)路径p9→p12的置信度为:μ9=μp9·μt9=0.12,远小于θ。
经过推理分析可知,导致最终库所P12发生的起始库所为P1、P2、P8,如图5 所示。根据置信度的大小排序,P8最有可能发生,也就是磁性堵塞或滑油滤有金属屑最有可能是故障原因;其次是P1,滑油油量不足;然后是P2,滑油系统存在气塞。因此,以上3 种故障原因要优先排查。

图5 可能的故障原因路径
在实际工作中,一线机务人员的排故过程是先检查磁性堵塞与滑油滤以及信号故障,再检查滑油箱内部,在油箱内部先检查油量与气塞情况,基本与推理分析的结果一致。目前此种检查模式已经在一线机务排故手册中采用。该方法有效减少了在故障诊断过程中的冗余推理,节省故障诊断时间,提高故障诊断效率。
3 结束语
本文通过对故障诊断的建模计算与分析,得到与实际情况一致的推理结果。将Delphi 法与模糊Petri网的应用优势结合在一起,采用反向推理,在推理计算过程中只需考虑与目标库所有联系的路径,逻辑关系简单清晰,减少了故障诊断中的冗余推理,并且能够在推理过程中通过计算将所有故障可能性自动排列清楚,提高了故障诊断效率,能较好地处理故障事件中的模糊信息,为航空发动机故障诊断提供了1 种可行方法。
在下一步的研究工作中将重点解决阈值与置信度选取、加入时间因素等问题,以求更直观地反映故障诊断效率。
