基于LabVIEW的迈克尔逊干涉微位移测量方法研究
2021-01-11李晓飞张周强张守京
李晓飞,张周强,张守京,周 玲
(西安工程大学机电工程学院,陕西 西安 710600)
0 引言
迈克尔逊干涉仪作为物理光学实验的重要光学仪器,广泛应用于测量激光波长、微小位移变化、折射率、弹性模量等领域,在干涉测量技术领域中具有重要的地位和作用[1-4],迈克尔逊干涉仪结构设计原理基础广泛应用于生产和科学研究领域。
在迈克尔逊干涉微小位移测量实验中,其检测原理均是根据微调手轮的移动改变光程差,引起干涉牛顿环的明暗变化,通过对干涉条纹变化数量的准确计数,实现对微小位移量的计算。传统的微小位移测量中,通常采用人眼观察条纹变化的方法来计数,当条纹变化数较多时,由于工作量较大与长时间的视觉集中,容易产生视觉疲劳,造成人工误差,对微小位移测量精度产生影响[5-6]。
针对上述人工计数容易造成的人为误差的缺陷,本文提出了一种基于LabVIEW的图像采集、处理的方法。采用CCD相机对干涉条纹采集,由计算机进行条纹变化计数,从而测量出引起条纹变化的微小位移,为干涉条纹的自动测量提供一种新的可行性技术方法。
1 测量原理及干涉条纹图像采集
1.1 系统测量原理
本实验的测量原理来源于迈克尔逊干涉仪的工作原理。系统光路原理如图1所示,该系统主要包含4个部分:He-Ne激光光源、迈克尔逊干涉系统、干涉条纹采集系统、图像处理系统。由He-Ne激光器发出的激光束经过声光调制器进行光强调制,到达分光镜后分成光束1和光束2,反射光束1经迈克尔逊干涉系统中的固定反射镜反射后回到分光镜,透射光束2到达被测物体后携带物体的位移信息反射回分光镜,2束反射光在分光镜交汇处发生干涉,在成像屏上形成明暗相间的一组同心圆,利用CCD相机对成像屏的干涉图像进行采集,传输到上位机LabVIEW平台进行图像处理,对干涉条纹进行计数,测得被测物体的微小位移,系统搭建实物如图2所示。

图1 迈克尔逊干涉系统测量原理
由于光束1的光程长度固定不变,而光束2的光程长度随着被测物体的移动发生改变,因此,2束光的光程差的变化取决于光束2的光程大小。当被测物体缓慢移动时,成像屏上的等倾干涉条纹逐渐收缩或扩张,并在中心处不断“湮灭”与“冒出”。当被测物体每移动半个波长,就有一个条纹在成像屏上出现或消失。若条纹变化数为N,则物体移动的距离为
Δd=N·λ/2
(1)

图2 迈克尔逊干涉系统测量实物
Δd为物体位移量;N为条纹变化数;λ为激光波长。
所以,实验的关键点在于N的测量,用人工目测的方法局限性大、稳定性不高。而利用CCD采集干涉图像,由计算机软件进行条纹变化计数以及信号的处理,更能适用于各种环境要求。
1.2 干涉条纹图像采集
传统的图像采集主要采用“模拟相机+图像采集卡”的工作方式[7],这种工作模式下,首先由模拟相机采集图像,然后经过图像采集卡将模拟信号转换为数字信号,通过PCI总线传输到PC上位机软件进行处理与显示。在最终结果显示前,由于信号经过多次转换,在传输过程中极易受到噪声信号的干扰,导致降低信噪比和测试结果的精确度。本系统根据现有的相机技术,拟采用数字相机来进行图像采集,将采集的图像数字信号通过USB3.0接口线直接送入上位机进行处理,降低了因信号转换引入的噪声的影响,并且使数字相机具有更快的传输速度和更高的分辨率。
数字相机采用信噪比和微光灵敏度高、稳定性好、具有高效图像采集速度的大恒MER-031型工业相机,该相机的分辨率最高达30万像素,输出的最大帧数达860帧/s,镜头选用TEC-M55MPW型55 mm镜头。
清晰的干涉条纹图像是进行图像预处理与条纹计数的关键。在图像采集、处理、显示方面,采用美国NI公司推出的LabVIEW编程软件。在图像处理、分析方面,LabVIEW提供了IMAQ Vision模块,即视觉图像采集模块[8-9]。将CCD相机使用USB串口线与计算机连接,通过调节其镜头焦距、镜头放大倍数,在Vision视觉采集助手中调节相机的曝光时间,使其能够清晰地拍摄到干涉条纹,以便利用LabVIEW软件对图像进行后续的预处理和条纹计数。
2 干涉条纹检测理论算法
2.1 干涉条纹处理流程
利用LabVIEW视觉采集助手采集到的干涉条纹图像中心区域暗斑面积大小呈周期性变化的规律现象,如图3所示。因此,对采集的干涉条纹图像处理的目的是获得中心区域的灰度均值。通过对图像进行对比度增强、滤波处理后等分析步骤,便可获取中心区域的灰度值。干涉图像的处理流程如图4所示。

图3 干涉条纹变化

图4 干涉条纹处理流程
2.2 条纹预处理模块
传统的图像预处理一般使用比较广泛的C语言来开发相关程序。C语言具有丰富运算符和数据类型、表达灵活、执行效率高等优势,但同时其语言复杂,系统维护和功能扩展有一些问题。本设计采用美国NI公司推出的G语言图形化编程语言的LabVIEW软件程序开发,具有更加直观的图标、连线的编程方式和后期的系统维护和功能扩展[10]。
推荐理由:本书荣获2018年国家出版基金资助项目,结合国家供给侧结构改革部署,帮助企业由“制”向“质”转型。对欧美、“一带一路”国家重点进口产品法规、标准进行全面解读,结合中国产品被召回的真实案例,帮助企业规避产品被召回的风险。开创性地探索跨境电商质量控制中的问题和解决方案,帮助企业在新商业环境下规避交易风险。
干涉条纹的预处理模块包含5个处理步骤:读取图像、图像对比度增强处理、滤波处理、选取ROI区域和灰度直方图统计处理。
2.2.1 读取图像
利用LabVIEW中的IMAQ ReadFile子VI读取采集的干涉条纹图像。
2.2.2 图像对比度增强处理
图像增强是图像处理的最基本手段。使用LabVIEW软件的IMAQ BCGLookup与IMAQ Histograph VI对灰度图像进行直方图均衡化处理和修正[11-12]。通过对图像进行亮度、对比度和伽玛值参数的调整,可改善图像的视觉效果,从而提供直观、清晰、适于分析的干涉条纹图像。基于LabVIEW平台图像处理结果如图5所示。

图5 直方图均衡处理
2.2.3 滤波处理
由于成像的光路系统、传输的介质、干涉图像成像设备、图像采集设备及周围环境因素等的影响,最终计算机系统采集到的干涉图像不可避免地会引入各种各样的噪声。针对图像中存在的噪声类型,采用自适应中值滤波算法,可以对不同区域干涉条纹的信号点和噪声点采取不同的处理方法[13]。
设fi,j为(i,j)的灰度;Ai,j为现工作窗口;fmin、fmax和fmed分别为Ai,j窗口中灰度的最小值、最大值和中值;Amax为最大允许预设窗口。其基本步骤如下:
a.若fmin 利用自适应中值滤波在LabVIEW平台上使用IMAQ NthOrder VI模块对干涉图像进行噪声滤除,滤波前后的结果分别如图6a和图6b所示。 图6 中值滤波 2.2.4 选取ROI区域 感兴趣区域(ROI)是从图像显示窗口中选择的一个图像区域,该区域内的数据是对图像进行分析出来时应重点关注的部分,常被称为子图像。为图像处理设定ROI,可以将注意力集中在要解决问题的主要方面,减少要处理的数据量,提高系统的处理速度和实时性。 为了能对迈克尔逊干涉条纹的变化进行计数,通过对干涉条纹变化趋势的观测,干涉条纹的中心区域的亮斑出现扩展(收缩)的变化趋势,亮斑的面积发生变化。因此,在LabVIEW平台上利用IMAQ Convert Annulus to ROI VI模块选定干涉条纹的中心位置,调节圆域的半径,使其在尽量小的情况下保证区域内的平滑值变化最小,测量图像不同时间的灰度值,确定干涉条纹变化的次数[14]。 2.2.5 灰度直方图统计 直方图是最基本的图像灰度分析工具,包含了丰富的图像信息,描述了图像的灰度级内容,反映了图像的灰度分布情况。在LabVIEW平台上,利用IMAQ Quantify VI模块对所选取的感兴趣区域(ROI)的灰度进行分析,返回图像或其中一部分灰度的定量描述参数,包括像素灰度均值、标准差、最大值和最小值等。 根据干涉条纹处理的要求,设计的软件程序界面如图7所示。点击Check Next Part,就可以切换到下一幅采集的干涉条纹图进行处理。用户通过调整BCG等相关参数,可以对条纹处理的效果做调整。为了能对条纹变化进行计数,在Dst图像中心区域用圆环进行感兴趣区域(ROI)选择,对选择的感兴趣区域进行灰度分析,并将测得的灰度结果显示在图像上。最后,将测得的灰度值进行拟合,通过观察波峰的数量,确定干涉条纹的变化数。 图7 程序界面及条纹处理效果 运行程序,干涉图像采集与处理效果如图7所示。为了测试实验的稳定性以及图像采集响应速度情况,分别对被测物体以不同的移动速度进行实验[15]。实验结果显示:在平稳缓慢的移动速度下,相机能够采集到清晰的条纹变化图像;但在高速移动的情况下,由于相机响应速度跟不上的原因,采集到的干涉条纹图像模糊成一片,不能实现条纹计数。因此,利用图像法对干涉条纹计数适用于对相机响应速度要求不高的情况。 为了测试被测物体缓慢移动时的条纹测量精度,缓慢匀速移动被测物体,测量位移量为0.02 mm的干涉条纹图像并对图像进行处理获得灰度均值。将测得的图像灰度均值进行统计与拟合,获得曲线变化图。通过对拟合曲线的波峰进行计数,便可测得被测物体的移动量。测得数据如表1所示。 表1 干涉条纹计数实验结果(λ=633 nm) 通过测得的实验数据表明,利用计算机对干涉图像采集与处理的方法测量精度误差控制在3.5%以内,与通常人工测量误差5%相比,本方法能够实现测量精度的提升。 本文提出了一种迈克尔逊干涉图像的检测方法,并基于LabVIEW编程实现干涉图像的采集与处理,解决了传统的使用人工观察计数条纹误差大、易受人为因素影响的问题。该方法具有功能实现灵活、易于维护和升级的特点,当工作环境发生变化时,只需要对软件中的相关参数进行调整。与采用光电探测器检测的方法相比,其缺点在于图像的采集易受相机的瞬态响应速度影响,若要测量被测物体高速移动的干涉图像,需要对干涉光束进行光强调制或采用能够高速采集的相机。但对于响应速度要求不高的情况下,采用计算机处理光学图像的方法足以满足测量精度。所提的检测方法也为其他形式的干涉图像的检测提供了一种新的思路和方法。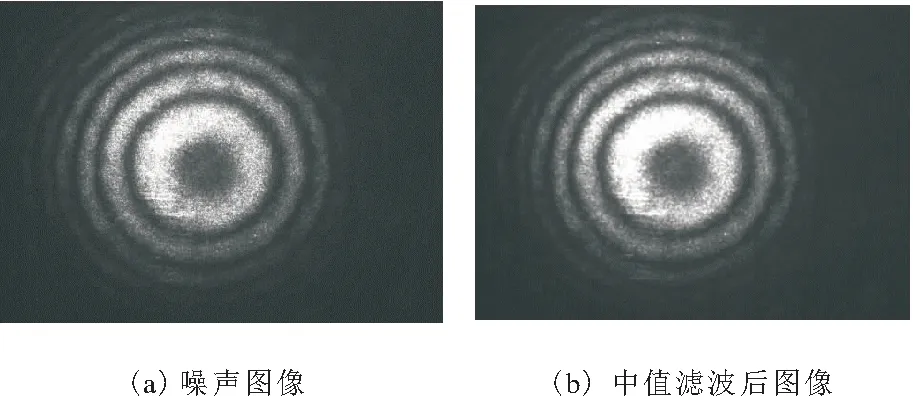

3 实验效果与分析

4 结束语