一种基于ZigBee的防追尾预警系统
2021-01-11王春娥吕启文姚城诚
周 磊,王春娥,吕启文,姚城诚
(1.盐城工学院电气工程学院,江苏盐城224002;2.盐城工学院材料科学与工程学院,江苏盐城224002)
随着轿车的普及,车辆追尾事故日益增多。为了防范车辆追尾事故的发生,国内外学者对防追尾技术进行了大量的研究。车辆防追尾技术的核心是在保证驾驶员完成基本规避追尾操作之前有足够的时间采取有效的安全措施。因此,提前给予驾驶员声音、光或者图像的追尾警示,让驾驶员实时获取车车相对距离和相对速度是所有车辆防追尾方案的关键。
目前,测距测速的常见方案有基于激光[1]、雷达[2]、图像处理以及全球定位等几种。基于激光和雷达的防追尾方案是利用激光和微波反射原理实现的,但遇到弯道障碍物时会出现误判行为;基于图像处理的防追尾方案需要在毫秒级别的时间间隔内完成图像拾取、车辆识别、车车相对距离识别、车车相对速度识别,硬件和软件实现难度很大,成本很高;基于全球定位技术实现的防追尾系统,10 m民用全球定位精度不足以正确区分高速公路上不同行车道上的车辆,进而会发生误判。
传统的防追尾系统为基于红外和雷达的独立式结构,只作用于单个车辆。2003年问世的ZigBee技术,因成本低、操作简单、耗电量低、可靠性高、节点连接数多,能够实现节点自组网,从而成为车车物联的理想选择。基于ZigBee技术,湖南大学的胡曙光[3]、吉林大学的冯魁[4]、安徽工业大学的郝小林[5]等分别从Kalman滤波GPS信号、追尾模型构建、最小安全距离等方面进行防追尾预警算法的探索。
本文基于ZigBee技术,以等间隔设置在道路上的ZigBee协调器、等间隔设置在行车道中心线上的RFID(Radio Frequency Identification,无线电射频识别)电子标签、车载ZigBee终端实现一个不受天气和弯道障碍物影响,甚至可以完全脱离GPS定位系统的防追尾预警系统。
1 系统构成和工作原理
系统由等间隔置于道路中心线上的道路节点(ZigBee协调器)、车载子节点(车载ZigBee终端)和等间隔置于行车道中心线上的RFID电子标签组成。其中道路节点被安置在双向道路的中线处,每个道路节点的无线通信范围覆盖一定路段,间隔排列的道路节点的通信范围可以覆盖整条道路;车载子节点则被安置在车辆中。图1给出了2个ZigBee星型网络的构建,网络中各节点均有自己的节点地址。图1中道路节点H通信范围内的车辆A、B、C、E、F可以自动组网通信,左虚线括弧对和右曲线括弧对分别为道路节点H和I的网络覆盖范围,中间的虚线括弧对为道路节点H和I的网络覆盖重叠区。理想情况下,中间虚线括弧对在道路边界上相交,即道路标记点K和L重合。
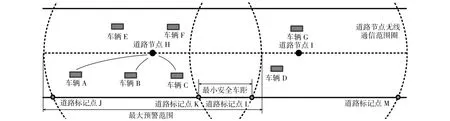
图1 防追尾预警系统道路布置图Fig 1 Road layout of anti-collision warning system
预警之前需要对双向车道的车辆进行车道判定。以车辆A和G为例,车辆A行驶途中先后与道路节点H和I组网,而车辆G则刚好相反。故只要获得车辆上一次组网的协调器地址和当下网络的协调器地址就可以判断车辆的网络切换顺序即行驶方向,对同方向车辆预警。
各车载子模块在自组网后,实时通过网络中的道路节点上传自身的GPS定位信息(坐标和时间),以及上个网络的协调器信息。例如,在道路节点H的网络中,车辆A、B、C处于同车道,道路节点将网络内同车道的车辆定位信息共享给其他车辆,即车辆A可以获得车辆B和C的定位数据;车辆A通过车载子节点对获得的各车定位数据进行计算,得到各车的车速和车间距离,并与车辆行驶的最小安全距离进行比较,以此作为是否报警的依据。
对于网络切换过程中的车辆预警情况,比如车辆C和D处于不同的网络之中,可以通过设置两个相邻道路节点之间的通信通道的方式,如利用RS485通信通道,实现相邻道路节点之间车辆GPS数据共享来解决。 图2为同方向同车道的车辆追尾预警系统硬件结构图,包含2个车载子节点(车载子模块)和1个道路节点(道路模块),可以满足夜间的预警需求,并提供人机交互。其中车载子模块包含OLED面板显示控制模块、GPS模块、预警信号输出模块、电源模块、ZigBee模块(含嵌入51内核)和MCU主控器;道路节点模块包含相同的ZigBee模块、MCU主控器、电源模块(附加太阳能供电)。采用的ZigBee模块通信范围均在500 m(道路节点间隔)以上,从而单个道路节点内的车辆预警范围可以大于1 000 m。

图2 防追尾预警系统硬件结构图Fig 2 Hardware structure of anti-collision warning system
图2车载子模块A、B的GPS模块分别从所连接的4颗定位卫星中获得各自的GPS定位参数,并传输给各自的MCU;随后各车载子模块通过ZigBee射频经由道路模块MCU实现GPS数据共享,此时车载子模块A的MCU获得自身和B车的GPS数据,车载子模块B的MCU获得自身和A车的GPS数据,经各自的MCU判定后通过音频和显示屏分别输出前车和后车的预警信息。具体的预警种类和人机交互界面如图3所示。

图3 人机交互界面设计图Fig 3 The designs of human-computer interaction interface
图3人机交互界面采用12864OLED显示屏显示。在车辆位置显示栏中,箭头代表车辆行驶方向,竖线分隔前后车辆,实心三角代表此方向有危险预警车辆,空心三角表示此方向没有危险预警车辆;车辆状态显示栏中,行驶安全时显示临近车辆位置信息,预警时显示预警车辆的车距和车速。预警信息显示内容和开关机画面与语音提示内容相对应。在系统运行结束后将显示本次行驶预警次数。
至此,同方向、同车道的车辆追尾预警问题已经得到很好的解决,可是对于不同行车道,但是同一水平位置的车辆还是会触发追尾预警,原因在于10 m的GPS定位精度无法很好地区分车辆行车道。为此,本文通过为车载Zigbee终端增加远程物联网服务器、RFID电子标签读写器,配合在各行车道中心线上等间隔设置的RFID电子标签来实现,如图4所示。图4中,Rm表示第m个车道;RmPi表示第m个车道第i个RFID标签;Cj表示第j部汽车;CMj表示第j部车上的车载ZigBee终端;S′表示道路节点(ZigBee协调器)。由于RFID标签中存有高速公路信息、位置信息和行车道信息,CMj只要扩展一个RFID读写器,便可以通过读取行车道上的RFID标签来获取高速公路、位置和行车道信息,然后经ZigBee网络通过道路节点S′与网络内的其他车辆实现数据共享。特别的是,在GPS信号失效的情况下,读取的RFID中的位置信息可以作为车辆GPS位置的替代。

图4 RFID电子标签定位原理图Fig 4 Schematic diagram of RFID electronic tag positioning
2 软件实现
车辆入网的过程是车载子节点和道路节点之间反复确认的过程。首先,道路节点(ZigBee协调器)为车载ZigBee终端分配地址;其次,反复核查数据2~3次,确保接收状态稳定。道路节点将网络内的车辆位置及速度等数据信息共享给其他车辆,使得各车都可以获得网络内部所有车辆的位置及速度等数据信息,以此计算车辆之间的距离。
2.1 最小安全距离计算模型
最小安全距离[6]为发现危险到车辆减速到0的过程,如图5所示。图5中,tr1时段为系统发现危险到处理输出信号的过程,s;tr2时段为驾驶员反应的过程,s;tb时段为刹车踩下后的减速度增加的过程,s;tc为制动持续时间,s。

图5 刹车减速度图Fig 5 The deceleration curve of brake
在tr1时段和tr2时段中,车辆位移:
S1=v0(tr1+tr2)
(1)
在tb时段中,车辆位移:

(2)
在tc时段中,车辆位移:

(3)
最小安全距离
S=S1+S2+S3
(4)
式中:S1、S2、S3分别为不同时段的车辆位移,m;S为最小安全距离,m;v0为预警出现时的汽车速度,m/s;amax为减速度,m/s2。
2.2 防追尾预警流程
2.2.1 车载ZigBee终端基本工作流程
车载ZigBee终端基本工作流程为:
S1车载终端上电。
S2车载终端进行初始化。
S3与道路节点(ZigBee)协调器组网。
S4通过GPS获取本车位置信息和速度信息。
S5通过RFID读取器获取行车道信息、位置信息,并间接计算车速。
S6对比S4和S5的位置和车速,利用算法进行修正。如果S4获取GPS位置失败,直接以S5的位置信息作为车辆位置信息。
S7向道路节点(ZigBee协调器)提交车辆的位置信息、速度信息和行车道信息。
S8等待道路节点返回网段内同一行车道上其他车辆的位置和速度信息。
S9根据最小安全距离算法评估网络内同一行车道上所有可能发生追尾的车辆。
S10对于有潜在追尾风险的车辆,车载ZigBee终端通过语音、屏幕重点标注的方式展现出来;在本车有潜在追尾风险的情况下,重点警示司机。
S11如果脱离当前道路节点覆盖范围,跳至S3;否则跳至S4。
2.2.2 道路节点(ZigBee)协调器的基本工作流程
道路节点(ZigBee)协调器的基本工作流程为:
S1系统上电。
S2系统各组件初始化。
S3处理车载终端的入网请求,并给其分配网络内的唯一节点地址。
S4当车载终端提交的车辆位置、行车道信息和速度信息更新时,通过通信通道向下一个道路节点请求同车道的车辆位置和速度信息;检索对应车道在本网络和下一个网络内的车辆位置、速度信息,返回给该车载终端。
S5对于超过设定更新时限的车载终端依次发送信息更新命令,在规定时间内车辆位置、行车道信息和速度信息更新的车载终端,执行S4;对于超过规定时间无信息返回的车载终端进行退网处理。
S6跳至S3。
3 实物测试
最终的硬件实物如图6所示。图6中自左至右依次是后车车载终端、道路节点(ZigBee协调器)、前车车载终端。测试时,设定车速为2 km/h、车距为4 m,触发追尾预警(界面显示实心三角)时,喇叭发出语音警报,同时后车车载终端显示前方车辆的速度与车距,并显示“即将追尾注意车距” ;前车车载终端显示后方车辆的速度与车距,并显示“后方来车请您注意”;道路节点则通过排灯显示网络内节点连接数。

图6 硬件实物Fig 6 Hardwares
4 结论
本文通过ZigBee技术实现车车互联、信息共享,利用道路节点对道路进行分段管理,利用车载终端的GPS和RFID读取器实现车辆的位置、速度与行车道的信息获取,最后利用最小安全距离模型实现车辆防追尾的预警,并在实物测试中得到了验证,证明了系统的可行性。由于现实研究的局限性,本系统的设计还可以进一步的优化,比如道路节点可通过远程服务器组建公路物联网,实现公路级别的车辆信息共享、防追尾预警与智能交通管控;在车载终端可引入嵌入式平台,通过智能中间件对车辆的行驶状态进行干涉,从而辅助驾驶员采取正确的操作规避追尾风险。
