融合多尺度特征的光场图像超分辨率方法
2021-01-08赵圆圆施圣贤
赵圆圆,施圣贤
融合多尺度特征的光场图像超分辨率方法
赵圆圆,施圣贤*
上海交通大学机械与动力工程学院,上海 200240
光场相机作为新一代的成像设备,能够同时捕获光线的空间位置和入射角度,然而其记录的光场存在空间分辨率和角度分辨率之间的制约关系,尤其子孔径图像有限的空间分辨率在一定程度上限制了光场相机的应用场景。因此本文提出了一种融合多尺度特征的光场图像超分辨网络,以获取更高空间分辨率的光场子孔径图像。该基于深度学习的网络框架分为三大模块:多尺度特征提取模块、全局特征融合模块和上采样模块。网络首先通过多尺度特征提取模块学习4D光场中固有的结构特征,然后采用融合模块对多尺度特征进行融合与增强,最后使用上采样模块实现对光场的超分辨率。在合成光场数据集和真实光场数据集上的实验结果表明,该方法在视觉评估和评价指标上均优于现有算法。另外本文将超分辨后的光场图像用于深度估计,实验结果展示出光场图像空间超分辨率能够增强深度估计结果的准确性。
超分辨;光场;深度学习;多尺度特征提取;特征融合

1 引 言
光场成像的概念最早由Lippmann[1]于1908年提出,经过较长一段时间的发展,Adelson和Wang[2]于1992年搭建了全光相机模型,随后Ng等人[3]于2005年设计出了手持式光场相机。作为新一代的成像设备,近年来光场相机已经被广泛应用到三维测试领域,如:三维流场测试[4-8]、三维火焰温度场重建[9]以及三维物体形貌重建[10-11]等。与传统相机不同,光场相机在主透镜与成像平面(CCD/CMOS)之间安装了一个微透镜阵列,可通过单次拍摄同时捕获空间中光线的空间位置和入射角度,因此能够从单张原始光场图像中还原出所拍摄场景的三维信息。然而由于光场相机的固有结构设计,其空间分辨率与角度分辨率之间存在一定的制约关系[3]。以商用光场相机Lytro Illum为例,其捕获的光场为7728 pixels×5368 pixels,而经过光场渲染得到的15×15的子图像阵列中每张子孔径图像的分辨率仅为625 pixels×434 pixels。过低的子图像空间分辨率导致光场深度估计算法得到的深度图分辨率过低,同时对深度估计结果的准确性造成一定的影响。因此,越来越多的学者投入到光场超分辨率研究中,以拓展光场相机的应用场景。
目前,主流的光场超分辨率主要分为空间超分辨率、角度超分辨率和时间超分辨率以及三者的任意组合。具体地,利用4D光场中的冗余信息并提出其所遵循的模型框架来实现超分辨率,这些光场超分辨率方法大致分为三大类:基于几何投影的方法、基于先验假设的优化方法和基于深度学习的方法[12]。基于几何投影的方法主要是根据光场相机的成像原理,通过获取不同视角子孔径图像之间的亚像素偏移来对目标视图进行超分辨。Lim等人[13]通过分析得出,光场2D角度维度上的数据中暗含着不同视角图像在空间维度上的亚像素偏移信息,继而提出了利用数学模型将其投影至凸集上进行迭代优化来获取高分辨率图像的方法。Georgiev等人[14]建立了专门针对聚焦型光场相机的超分辨框架,通过子图像中的对应点找出相邻视图之间的亚像素偏移,然后将相邻视图中的像素传播至目标视图中得到超分辨率结果。基于先验假设的方法是研究人员为了重建出更真实的高分辨率视图所提出的。这类方法在利用4D光场结构的同时加入了对实际拍摄场景的先验假设,由此提出相应的物理模型对光场超分辨率问题进行优化求解。Bishop等人[15]在光场成像模型中加入了朗伯反射率和纹理保留的先验假设,并在变分贝叶斯框架中对光场图像进行超分辨,实验表明该算法在真实图像上有较好的表现。Rossi等人[16]提出了一种利用不同光场视图信息并结合图正则化器来增强光场结构并最终得到高分辨率视图的方法。考虑实际光场图像中的噪声问题,Alain和Smolic[17]提出了一种结合SR-BM3D[18]单图像超分辨滤波器和LFBM5D[19]光场降噪滤波器的方法,通过在LFBM5D[19]滤波步骤和反投影步骤之间反复交替以实现光场超分辨。基于深度学习的光场超分辨率近年来也在逐渐兴起。Yoon等人[20]首次采用深度卷积神经网络对光场图像进行空间和角度超分辨。在他们的工作中,首先通过空间超分辨网络对每个子孔径图像进行上采样并结合4D光场结构对其增强细节,然后通过角度超分辨网络生成相邻视图之间新的视角图像。Wang等人[21]将光场子图像阵列看作是2D图像序列,用双向递归卷积神经网络对光场中相邻视角图像之间的空间关系进行建模,并设计了一种隐式多尺度融合方案来进行超分辨重建。Zhang等人[22]提出了一种使用残差卷积神经网络的光场图像超分辨方法(ResLF),通过学习子图像阵列中水平、竖直和对角方向上的残差信息,并将其用于补充目标视图的高频信息,实验结果表明该方法在视觉和数值评估上均表现出优良的性能。
为了充分利用4D光场的冗余信息,需要结合光场中2D空间维度和2D角度维度上的数据来学习4D光场中的固有结构特征和丰富的纹理细节,以最终实现光场超分辨率。受基于深度学习的立体图像超分辨率网络框架PASSRnet[23]的启发,本文提出了一种融合多尺度特征的光场超分辨率网络结构。该方法的核心思想是:在无遮挡情况下,光场×的子图像阵列中,中心视角图像中的像素点与其他周围视角图像中与之对应的像素点之间存在特定的变换关系。通过利用这一几何约束,某一视图的纹理细节特征可被来自其他视图的补充信息所增强。本文所提出的超分辨率网络框架中,首先通过原子空间金字塔池化(atrous spatial pyramid pooling,ASPP)模块[24]来扩大感受野以学习到光场中2D空间维度上的多尺度特征,然后经由融合模块对所提取的特征进行融合并结合光场中2D角度维度上的几何约束进行全局特征增强,最后由上采样模块对光场图像进行空间超分辨。该网络通过对多尺度特征的融合与增强,能够累积到光场中丰富的纹理细节信息,在×2超分辨率任务中,该方法在遮挡和边缘区域也能表现出良好的重建效果,平均信噪比(peak signal to noise ratio,PSNR)比现有方法提高了0.48 dB。本文将超分辨后的光场图像用于深度估计,以探索光场空间超分辨率对深度估计结果的增强作用。
2 本文方法
2.1 算法模型与框架
在本文中,使用HR表示原始的高分辨率光场,LR表示对应的经过下采样得到的低分辨率光场。由于高分辨率光场与对应的低分辨率光场之间保持一致性,因此LR可看作是HR经过光学模糊和下采样而得到的。考虑到上述过程中引入的噪声问题,可对LR和HR之间的一致性关系进行如下数学建模[25]:

式中:为模糊矩阵,表示下采样矩阵,代表过程中可能会引入的误差项。
光场超分辨率重建任务可看作是式(1)描述过程的逆过程,即对LR进行上采样并进一步去除模糊,从而得到超分辨率后的光场SR。具体过程可被数学描述为

式中:B-1表示去模糊矩阵,S-1为上采样矩阵,表示超分辨率后的光场GSR与原始的高分辨率光场GHR之间的误差。由上式可以看出,在超分辨率重建任务中,利用更多的纹理细节信息可以较大程度上重建出更接近原始数据的光场。由于真实图像中往往存在噪声,故在超分辨率重建过程中加入抗噪声模块,将会进一步提升超分辨率算法的性能。
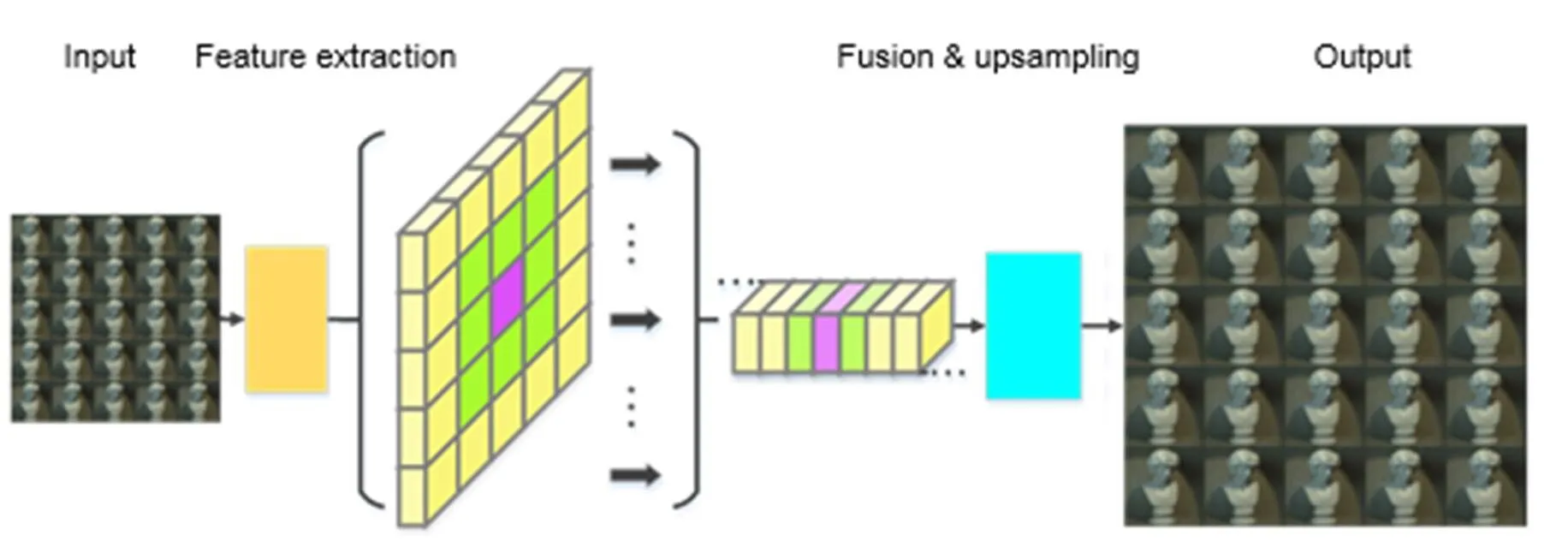
本文所提出的算法框架将LR和HR作为网络的输入数据和真实数据,以训练得到上采样映射,从而输出光场超分辨率重建结果SR。如图1(a)所示,该网络结构分为三大模块:多尺度特征提取模块、全局特征融合模块和上采样模块。首先,多尺度特征提取模块分别对低分辨率光场LR中的每个视图进行特征提取,以得到×的特征图阵列;然后生成的特征图阵列经过堆叠后被发送至融合模块进行特征融合,同时该模块利用光场中角度维度上的约束对所提取的特征进行全局增强;而后获得的光场结构特征被发送至上采样模块以最终输出超分辨后的光场子图像阵列。每个模块的网络结构设计与作用将在下一节介绍。
2.1.1 多尺度特征提取
纹理信息对于大多数图像处理任务具有十分重要的意义。在超分辨率任务中,对高频信息的有效提取和利用决定了能否详实地重建出高分辨率图像中的细节部分。因此,本文采用ASPP块来扩大接收域并分别从每张光场子孔径图像中提取多尺度特征。如图1(b)的示例,该ASPP块由膨胀率不同的原子空洞卷积组成。不同膨胀率的原子空洞卷积的感受野不同,因此ASPP块可以累积来自图像中不同区域的纹理细节信息。本文算法在ASPP块结构基础上加入了残差式的设计,组成了ResASPP(residual atrous spatial pyramid pooling,ResASPP)块的网络子结构。如图1(c)所示,将3个结构参数相同的ASPP块级联并以残差的形式加到上游输入中即为1个ResASPP块。在每个ASPP块中,首先3个原子空洞卷积分别以=1,4,8的膨胀率对上游输入进行特征提取,然后再由1个1×1的卷积核对所得到的多尺度特征进行融合。整体的多尺度特征提取模块的操作流程为:低分辨率光场LR中的子孔径图像经过1个常规卷积和1个残差块(residual block,ResB)的处理提取出低级特征;接着,由交替出现两次的ResASPP块和残差块对低级特征进行多尺度特征提取及特征融合,从而得到每张子孔径图像的中级特征。如图1(a)所示,多尺度特征提取模块分别对×的低分辨率子图像阵列中的每个视图进行操作,最终提取出与之相对应的×特征图阵列。在多尺度特征提取环节,网络主要对4D光场中2D空间维度上的信息加以利用并从中获取图像空间中的纹理细节特征。
2.1.2 全局特征融合



图2 融合块FusionB原理示意图。(a) FusionB结构;(b) 多尺度特征与经过FusionB融合后的特征对比
光场中每张低分辨率视图是从略微不同的角度来捕获场景,因此某一视图中未获取的纹理细节可能会被另一个视图捕获到。即一个视图的纹理细节特征可被来自其他视图的补充信息所增强。考虑到光场中每个视角之间的基线很小,中心视角图像可通过一定的“翘曲变换”(warping transformation)生成其他周围视角图像,反之亦然。中心视图生成周围视图的过程可被数学描述为







2.1.3 上采样模块及损失函数
在特征提取和融合模块完成对4D光场结构特征的学习后,上采样模块将对获取的特征图进行超分辨率重建。该模块采用了超分辨率网络常用的上采样方法¾子像素卷积(sub-pixel convolution),或被称为像素洗牌操作(pixel shuffle)[26]。子像素卷积模块首先从输入的通道数为的特征图中产生2个通道数为的特征图,然后对得到的通道数为2´的特征图进行抽样操作,并由此生成分辨率为倍的高分辨率特征图[26]。该高分辨率特征图被发送至1个常规的卷积层中进行特征融合并最终生成超分辨后的光场子图像阵列。在训练过程中,超分辨后的光场子孔径图像分别与实际的高分辨率光场子孔径图像进行一一对比,本文的损失函数使用L1范数(如式(10)所示),因为在神经网络训练过程中表现出了更好的性能。另外,网络采用泄露因子为0.1的带泄露修正线性单元(leaky ReLU)作为激活函数以避免训练过程中神经元不再进行信息传播的情况。

2.2 算法性能评价指标
本文选用图像超分辨率重建领域常用的PSNR和结构相似性(structural similarity,SSIM)评价指标对算法性能进行评价。对于超分辨率重建后得到的光场SR和真实光场数据HR可计算出光场中每张子孔径图像对应的PSNR值(用PSNR表示,单位dB):

3 实验结果与分析
实验使用了来自HCI1[28]和HCI2[29]的4D合成光场图像以及由Lytro Illum光场相机拍摄的分别来自Stanford[30]和EPFL[31]的真实图像。从Stanford和EPFL数据集中分别随机取出约5/6的光场数据与HCI2数据集组合作为训练集,并把Stanford和EPFL数据集中剩下的光场数据与HCI1中的光场数据组合作为测试集。本实验中训练集和测试集分别有419个和91个光场图像。所有的实验LF图像均按照5×5的角度分辨率进行预处理,然后使用双三次插值对高分辨率光场HR进行空间×2降采样以获得低分辨率光场LR,再使用本文方法对LR进行超分辨处理以得到超分辨率重建结果SR。超分辨率重建结果的质量由PSNR和SSIM来进行定量评估。在实验中,将本文方法与×2单张图像超分辨方法FALSR[32]和传统光场超分辨方法GBSR以及基于深度学习的光场图像超分辨方法ResLF进行对比,用于展示所提方法的性能与潜力。
在训练过程中,LR中的低分辨率(low resolution,LR)子孔径图像被以32 pixels的步长裁剪成了空间大小为64 pixels×64 pixels的小块,HR中的高分辨率(high resolution,HR)子孔径图像也对应地被裁剪成大小为128 pixels×128 pixels的小块,由此构成网络的输入数据和真实数据。在实验中,通过水平和垂直地随机翻转图像来进行数据增强。本文搭建的神经网络在Nvidia GTX 1070 GPU的PC上基于Pytorch框架进行训练,模型使用Adam优化方法[33]并且使用Xaviers方法[34]初始化每一层卷积层的权重。模型的初始学习率设置为2×10-4,每20个周期衰减0.5倍,经过80个周期后停止训练,整个训练过程大约需要2天左右的时间。在测试过程中,分别将模型应用到合成数据集和真实数据集上以评估本文所采用的超分辨网络的性能,进一步地将超分辨率光场SR中的超分辨率(super resolution,SR)子孔径图像阵列应用到深度估计上以观察光场空间超分辨率对视差计算的影响。
3.1 合成光场图像
在训练过程中使用了HCI2合成数据集中的光场图像,因此使用HCI1中的合成光场图像对各超分辨率方法进行性能测试。实验中基于深度学习的超分辨率算法FALSR和ResLF采用的是作者发布的预先训练好的模型。另外,双三次插值图像超分辨率方法在实验中被当作基准算法。图3展示了各算法对场景Buddha、Mona和Papillon的超分辨率重建结果。实验结果表明,双三次插值重建出的图像整体上比较模糊,这是由于该方法主要利用了图像中的低频信息而忽略了对高频信息的有效利用。而基于光场几何约束的传统方法GBSR能够较为真实地重建出超分辨率图像,整体上表现出了不错的性能,然而该方法重建场景中的边缘部分会出现模糊或过度锐化问题。另外,GBSR算法完成1个场景的光场超分辨率重建大概需要2 h~3 h,十分耗时。基于深度学习的×2单张图像超分辨方法FALSR对于场景中同一物体内部区域的重建效果较好,但由于仅利用单张视图而没有考虑4D光场结构中的隐含线索,因此无法重建复杂的纹理,同时该方法存在较大程度的锐化过度问题。而基于深度学习的光场超分辨方法ResLF通过结合EPI空间中的极线约束可较为真实地重建出图像中的纹理细节,但由于没有用到光场中的全部视角图像从而导致对遮挡边缘部分的重建结果有些失真。本文提出的超分辨率网络通过利用光场中的所有视角图像,能够更为真实地重建出高分辨率图像中的纹理信息,同时全局特征融合模块一定程度上改善了边缘模糊失真和锐化过度的情况,在主观视觉上表现出了更好的重建性能。定量的性能评估结果如表1所示,蓝色字体标注了除本文方法外的评估指标最高的算法,红色字体则标注了本文方法优于蓝色字体所标注方法的场景。由表1看出ResLF重建出的图像保持着较高的结构相似度,GBSR在合成图像重建上整体获得了次佳的分数,而本文方法在PSNR和SSIM上均优于其他方法。
3.2 真实光场图像

图3 合成数据光场超分辨结果。(a) Buddha场景;(b) Mona场景;(c) Papillon场景
超分辨率算法常被用于真实图像任务,本文进一步地使用Lytro Illum相机拍摄的真实光场数据来测试各超分辨率算法的性能。真实图像往往存在许多实际问题,特别是Lytro拍摄的光场图像存在较多噪点,这对光场超分辨率重建以及视差计算造成了一定的困难。通常HR光场子图像中1个像素位置的噪点经过下采样-上采样过程之后在SR图像中将会呈现出2×2像素区域大小的噪点。噪点在图像中随机离散地分布,较多的噪点导致真实图像超分辨率结果的PSNR值与合成图像相比整体偏低。
图4展示了真实光场数据的超分辨率重建结果。其中,FALSR由于没有利用来自其他视角图像中的冗余信息而导致重建效果不佳,甚至重建图像中物体的边缘可能会存在较大程度的扭曲变形,如图4(a)中重建的栅栏的边缘部分。ResLF通过利用多个方向的EPI信息能够较为详实地还原图像中复杂的纹理细节,特别是对于图像空间中方向为水平、竖直和对角的纹理。但该方法超分辨率重建图像中的边缘部分仍会存在过度平滑和模糊的现象,如图4(b)中重建出的车牌号码中的字母“A”。本文所提方法能够较好地重建出各个方向的纹理信息,包括圆滑的边缘信息,整体上表现出了较高的光场超分辨率重建性能,如图4(c)中的校徽以及花瓣的边缘。
定量评估结果如表2所示,蓝色字体标注了除本文方法外的评价指标最高的算法,红色字体标注了本文方法优于蓝色字体所标注方法的场景。由表2,本文方法重建出的Fence场景的PSNR低于ResLF和FALSR。这是由于该场景的原始图像中存在较多噪点,而本文网络在设计中没有特别考虑降噪问题,同时融合模块过多地累加了噪点的多尺度特征。另外,本文方法在Fence场景下的SSIM略低于ResLF,这是因为ResLF对水平、竖直和对角的纹理有较强的超分辨率重建能力,而Fence场景中存在较多的对角纹理。在Cars和Flowers场景中,本文方法在PSNR和SSIM上的表现均优于其他方法。将本文网络用于测试集中的Stanford真实光场图像的超分辨率重建上,得到的平均PSNR/SSIM为38.30 dB/0.9778,比ResLF文献中在Stanford数据集上得到的PSNR/SSIM(35.48 dB/0.9727)值略高,且比FALSR文献中在公开数据集Set5[35]上×2超分辨所得的PSNR(37.82 dB)值也略高。综合地看,本文所提出的超分辨网络在主观视觉和评价指标上处于相对领先的水平。
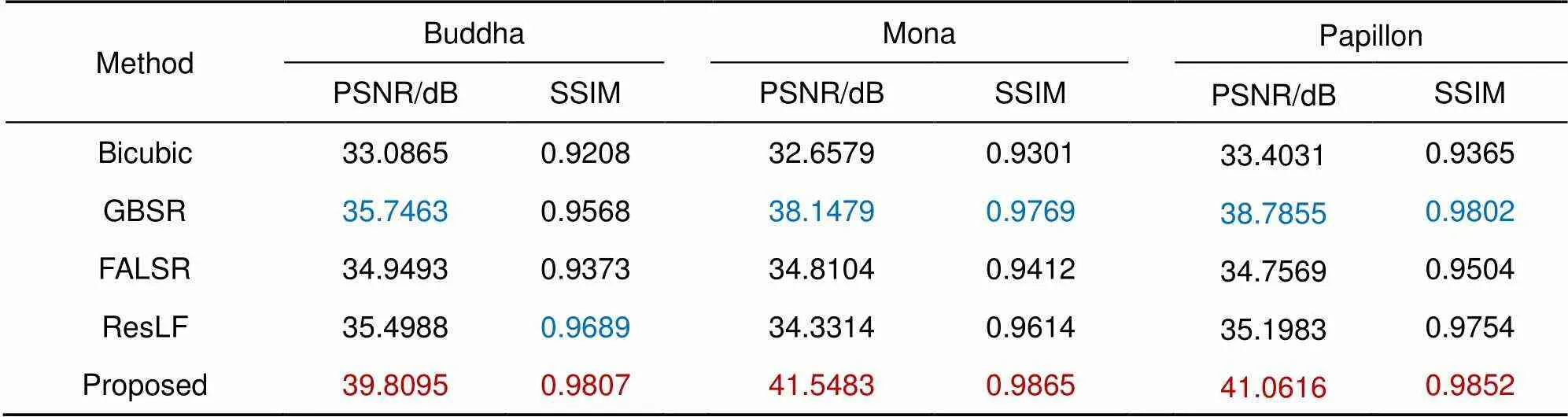
表1 不同超分辨算法在合成数据上的性能比较
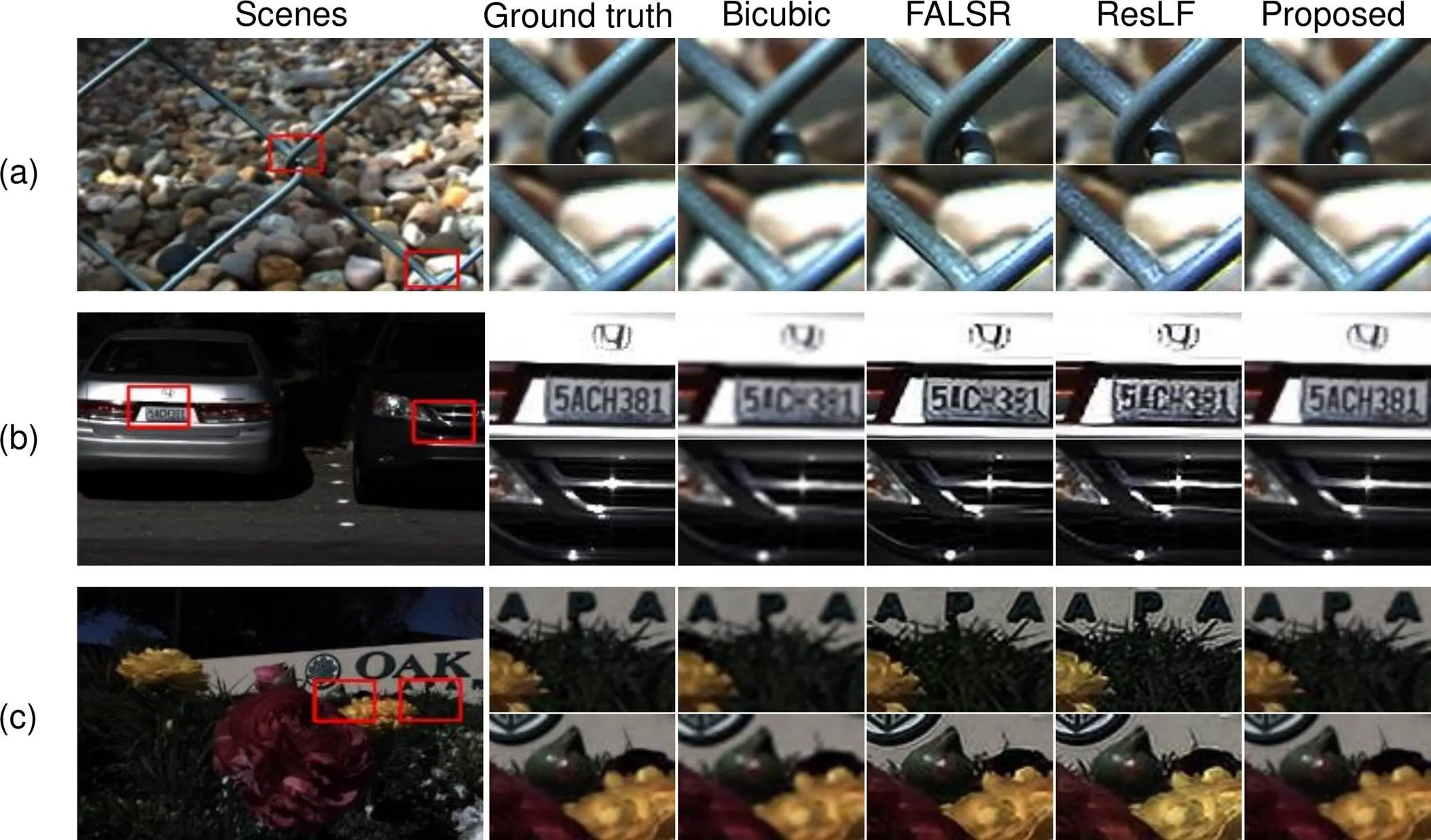
图4 真实数据光场超分辨结果。(a) Fence场景;(b) Cars场景;(c) Flowers场景
3.3 应用于深度估计
为了观察光场空间超分辨率对视差计算结果的影响,本节分别对经下采样得到的低分辨率光场LR和经本文方法得到的超分辨率光场SR进行了深度估计。深度估计算法统一采用POBR[36],图5中分别展示了场景真实的视差图(Ground truth)、由LR计算得到的低分辨率视差图(LR depth)和由SR计算得到的高分辨率视差图(SR depth)。值得一提的是,SR depth的分辨率为LR depth的2倍,因此对光场进行空间超分辨率可进一步获得高分辨率的深度图。另一方面,深度估计结果表明,高分辨率的光场子图像阵列中包含更为丰富的纹理信息,尤其能为遮挡或边缘区域提供更多的线索,因此可以更加准确地还原出所拍摄场景的深度信息,如图5中黑色方框标记的部分。

表2 不同超分辨算法在真实数据上的性能对比
为了更直观地展示深度估计结果的优劣,本文将LR depth和SR depth分别与Ground truth对比,得到图6所示的误差图。在实验中,SR depth与Ground truth直接相减求绝对值以得到误差图。而由于LR depth和Ground truth的分辨率不同无法直接做差,因此先采用双三次插值对Ground truth进行下采样,然后再将经下采样得到的视差图与LR depth对比来得到LR depth的误差图。双三次插值的本质是对图像进行平滑滤波,这会使得Ground truth下采样后的视差数据值较小幅度地偏离原始数据,并且使得视差数据的极大值变小。因此LR depth的误差图与SR depth的误差图相比,其中绝大部分像素位置的数值会偏大,而在纹理边缘所对应的像素位置的数值会偏小。故图6所展示的误差图对比是一种略失公允的对比,但对比结果依然能够说明一定的问题。如图6中红色方框标记区域的视差计算误差,超分辨后的光场深度估计结果优于低分辨率光场的深度估计结果,这与在图5上的直观视觉对比结果相一致。另外,本文分别对两个场景的平均视差误差LR depth error和SR depth error进行了计算。其中,Mona场景中低分辨率光场视差的平均计算误差为0.1699 pixels,高分辨率光场视差的平均计算误差为0.0075 pixels。而Flower场景中低分辨率光场视差的平均计算误差为0.2013 pixels,高分辨率光场视差的平均计算误差为0.0434 pixels。

图5 视差估计结果。(a) Mona场景视差图;(b) Flowers场景视差图

图6 深度估计结果与真实深度之间的误差图(单位:像素)。(a),(b) Mona场景误差图;(c),(d) Flowers场景误差图
4 结 论
本文提出了一种融合多尺度特征的光场超分辨网络以提高光场子孔径图像的空间分辨率。在所提的网络框架中,通过多尺度特征提取模块探索4D光场中的固有结构信息,然后采用融合模块对提取到的纹理信息进行融合和增强,最后使用上采样模块实现光场子图像阵列的超分辨率。实验结果表明,该方法在合成光场数据集和真实光场数据集上均表现出了较好的性能,×2超分辨率重建情况下,平均PSNR比单图超分辨方法FALSR高0.48 dB,平均SSIM比光场超分辨率方法ResLF评价指标高0.51%。另外,该方法在主观视觉上也表现出了良好的超分辨率重建性能。该方法不仅能够重建图像空间中水平、竖直和对角方向的纹理,同时还可用于其他各个方向的复杂纹理重建。进一步地,本文将超分辨结果用于光场深度估计,发现其能够为遮挡或边缘区域提供更多的线索,实验结果展示出光场图像空间超分辨率在一定程度上增强了视差计算结果的准确性。
[1] Lippmann G. Épreuves réversibles donnant la sensation du relief[J]., 1908, 7(1): 821‒825.
[2] Adelson E H, Wang J Y A. Single lens stereo with a plenoptic camera[J]., 1992, 14(2): 99‒106.
[3] Ng R, Levoy M, BrédifM,. Light field photography with a hand-held plenoptic camera[R]. Stanford Tech Report CTSR 2005-02, 2005.
[4] Tan Z P, Johnson K, Clifford C,. Development of a modular, high-speed plenoptic-camera for 3D flow-measurement[J]., 2019, 27(9): 13400‒13415.
[5] Fahringer T W, Lynch K P, Thurow B S. Volumetric particle image velocimetry with a single plenoptic camera[J]., 2015, 26(11): 115201.
[6] Shi S X, Ding J F, New T H,. Volumetric calibration enhancements for single-camera light-field PIV[J]., 2019, 60(1): 21.
[7] Shi S X, Ding J F, New T H,. Light-field camera-based 3D volumetric particle image velocimetry with dense ray tracing reconstruction technique[J]., 2017, 58(7): 78.
[8] Shi S X, Wang J H, Ding J F,. Parametric study on light field volumetric particle image velocimetry[J]., 2016, 49: 70‒88.
[9] Sun J, Xu C L, Zhang B,. Three-dimensional temperature field measurement of flame using a single light field camera[J]., 2016, 24(2): 1118‒1132.
[10] Shi S X, Xu S M, Zhao Z,. 3D surface pressure measurement with single light-field camera and pressure-sensitive paint[J]., 2018, 59(5): 79.
[11] Ding J F, Li H T, Ma H X,. A novel light field imaging based 3D geometry measurement technique for turbomachinery blades[J]., 2019, 30(11): 115901.
[12] Cheng Z, Xiong Z W, Chen C,. Light field super-resolution: a benchmark[C]//,Long Beach, CA, 2019.
[13] Lim J, Ok H, Park B,. Improving the spatail resolution based on 4D light field data[C]//, Cairo, Egypt, 2009, 2: 1173‒1176.
[14] Georgiev T, Chunev G, Lumsdaine A. Superresolution with the focused plenoptic camera[J]., 2011, 7873: 78730X.
[15] Bishop T E, Favaro P. The light field camera: extended depth of field, aliasing, and superresolution[J]., 2012, 34(5): 972‒986.
[16] Rossi M, Frossard P. Graph-based light field super-resolution[C]//, Luton, UK, 2017: 1‒6.
[17] Alain M, Smolic A. Light field super-resolution via LFBM5D sparse coding[C]//, Athens, Greece, 2018: 1‒5.
[18] Egiazarian K, Katkovnik V. Single image super-resolution via BM3D sparse coding[C]//, Nice, France, 2015: 2849‒2853.
[19] Alain M, Smolic A. Light field denoising by sparse 5D transform domain collaborative filtering[C]//, Luton, UK, 2017: 1‒6.
[20] Yoon Y, Jeon H G, Yoo D,. Learning a deep convolutional network for light-field image super-resolution[C]//,Santiago, Chile, 2015: 57‒65.
[21] Wang Y L, Liu F, Zhang K B,. LFNet: a novel bidirectional recurrent convolutional neural network for light-field image super-resolution[J]., 2018, 27(9): 4274‒4286.
[22] Zhang S, Lin Y F, Sheng H. Residual networks for light field image super-resolution[C]//, Long Beach, CA, USA, 2019: 11046‒11055.
[23] Wang L G, Wang Y Q, Liang Z F,. Learning parallax attention for stereo image super-resolution[C]//, Long Beach, CA, USA, 2019: 12250‒12259.
[24] Chen L C, Zhu Y K, Papandreou G,. Encoder-decoder with atrous separable convolution for semantic image segmentation[C]//,Glasgow, United Kingdom, 2018: 801‒818.
[25] Wang R G, Liu L L, Yang J,. Image super-resolution based on clustering and collaborative representation[J]., 2018, 45(4): 170537. 汪荣贵, 刘雷雷, 杨娟, 等. 基于聚类和协同表示的超分辨率重建[J]. 光电工程, 2018, 45(4): 170537.
[26] Shi W Z, Caballero J, Huszár F,. Real-time single image and video super-resolution using an efficient sub-pixel convolutional neural network[C]//,Las Vegas, USA,2016: 1874‒1883.
[27] Xu L, Fu R D, Jin W,. Image super-resolution reconstruction based on multi-scale feature loss function[J]., 2019, 46(11): 180419. 徐亮, 符冉迪, 金炜, 等. 基于多尺度特征损失函数的图像超分辨率重建[J]. 光电工程, 2019, 46(11): 180419.
[28] Wanner S, Meister S, Goldluecke B. Datasets and benchmarks for densely sampled 4D light fields[M]//Bronstein M, Favre J, Hormann K.,&,Lugano, Switzerland: The Eurographics Association, 2013: 225‒226.
[29] Honauer K, Johannsen O, Kondermann D,. A dataset and evaluation methodology for depth estimation on 4D light fields[C]//, Taipei, Taiwan, China, 2016: 19‒34.
[30] Raj S A, Lowney M, Shah R,. Stanford lytro light field archive[EB/OL]. http://lightfields.stanford.edu/LF2016.html. 2016.
[31] Rerabek M, Ebrahimi T. New light field image dataset[C]//, Lisbon, Portugal, 2016.
[32] Chu X X, Zhang B, Ma H L,. Fast, accurate and lightweight super-resolution with neural architecture search[Z]. arXiv: 1901.07261, 2019.
[33] Kingma D P, Ba L J. Adam: a method for stochastic optimization[C]//, San Diego, America, 2015.
[34] Glorot X, Bengio Y. Understanding the difficulty of training deep feedforward neural networks[C]//, Sardinia, Italy, 2010: 249‒256.
[35] Bevilacqua M, Roumy A, Guillemot C,. Low-complexity single-image super-resolution based on nonnegative neighbor embedding[C]//, Guildford, UK, 2012.
[36] Chen J, Hou J H, Ni Y,. Accurate light field depth estimation with superpixel regularization over partially occluded regions[J]., 2018, 27(10): 4889‒4900.
Light-field image super-resolution based on multi-scale feature fusion
Zhao Yuanyuan, Shi Shengxian*
School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
Structure of light-field image super resolution network
Overview:As a new generation of imaging equipment, a light-field camera can simultaneously capture the spatial position and incident angle of light rays. However, the recorded light-field has a trade-off between spatial resolution and angular resolution. Especially the limited spatial resolution of sub-aperture images limits the application scenarios of light-field cameras. Therefore, a light-field super-resolution network that fuses multi-scale features to obtain super-resolved light-field is proposed in this paper. The deep-learning-based network framework contains three major modules: multi-scale feature extraction module, global feature fusion module, and up-sampling module. The design ideas of different modules are as follows.
a) Multi-scale feature extraction module: To explore the complex texture information in the 4D light-field space, the feature extraction module uses ResASPP blocks to expand the perception field and to extract multi-scale features. The low-resolution light-field sub-aperture images are first sent to a Conv block and a Res block for low level feature extraction, and then a ResASPP block and a Res block are alternated twice to learn multi-scale features that accumulate high-frequency information in the 4D light-field.
b) Global feature fusion module: The light-field images contain not only spatial information but also angular information, which implies inherent structures of 4D light-field. The global feature fusion module is proposed to geometrically reconstruct the super-resolved light-field by exploiting the angular clues. It should be noted that the feature maps of all the sub-images from the upstream are first stacked in the channel dimension of the network and then are sent to this module for high-level features extraction.
c) Up-sampling module: After learning the global features in the 4D light-field structure, the high-level feature maps could be sent to the up-sampling module for light-field super resolution. This module uses sub-pixel convolution or pixel shuffle operation to obtain 2 spatial super-resolution, after feature maps are sent to a conventional convolution layer to perform feature fusion and finally output a super-resolved light-field sub-images array.
The network proposed in this paper was applied to the synthetic light-field dataset and the real-world light-field dataset for light-field images super-resolution. The experimental results on the synthetic light-field dataset and real-world light-field dataset showed that this method outperforms other state-of-the-art methods in both visual and numerical evaluations. In addition, the super-resolved light-field images were applied to depth estimation, and the results illustrated the parallax calculation enhancement of light-field spatial super-resolution, especially in occlusion and edge regions.
Citation: Zhao Y Y, Shi S X,. Light-field image super-resolution based on multi-scale feature fusion[J]., 2020,47(12): 200007
* E-mail: kirinshi@sjtu.edu.cn
Light-field image super-resolution based on multi-scale feature fusion
Zhao Yuanyuan, Shi Shengxian*
School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
As a new generation of the imaging device, light-field camera can simultaneously capture the spatial position and incident angle of light rays. However, the recorded light-field has a trade-off between spatial resolution and angular resolution. Especially the application range of light-field cameras is restricted by the limited spatial resolution of sub-aperture images. Therefore, a light-field super-resolution neural network that fuses multi-scale features to obtain super-resolved light-field is proposed in this paper. The deep-learning-based network framework contains three major modules: multi-scale feature extraction, global feature fusion, and up-sampling. Firstly, inherent structural features in the 4D light-field are learned through the multi-scale feature extraction module, and then the fusion module is exploited for feature fusion and enhancement. Finally, the up-sampling module is used to achieve light-field super-resolution. The experimental results on the synthetic light-field dataset and real-world light-field dataset showed that this method outperforms other state-of-the-art methods in both visual and numerical evaluations. In addition, the super-resolved light-field images were applied to depth estimation in this paper, the results illustrated that the disparity map was enhanced through the light-field spatial super-resolution.
super-resolution; light-field; deep learning; multi-scale feature extraction; feature fusion
National Natural Science Foundation of China (11772197)
10.12086/oee.2020.200007
TP391.4
A
赵圆圆,施圣贤. 融合多尺度特征的光场图像超分辨率方法[J]. 光电工程,2020,47(12): 200007
: Zhao Y Y, Shi S XLight-field image super-resolution based on multi-scale feature fusion[J]., 2020, 47(12): 200007
2020-01-03;
2020-04-15
国家自然科学基金资助项目(11772197)
赵圆圆(1995-),女,硕士研究生,主要从事计算机视觉、光场成像技术的研究。E-mail:ZhaoYuanyuan_236@163.com
施圣贤(1980-),男,博士,副教授,主要从事机器视觉、光场三维测试技术的研究。E-mail:kirinshi@sjtu.edu.cn
