复杂非均匀背景下的鲁棒声呐恒虚警检测算法
2021-01-08卢术平
卢术平,胡 鹏,丁 烽
(杭州应用声学研究所,浙江杭州 310023)
0 引 言
为了克服背景功率起伏情况下固定门限检测带来的弊端,1968年Finn等[1]提出了单元平均恒虚警(Cell Average-Constant False Alarm Ratio, CACFAR)检测算法,利用临近参考单元(一般选择距离分辨单元)中回波数据统计平均估计待检测单元(Cell Under Test, CUT)背景功率水平。CA-CFAR检测算法假设参考单元与 CUT背景为独立同分布,即均匀背景。同样地,在传统背景归一化处理中,也假设参考单元数据统计均匀[2]。然而,由于海洋生物、海底起伏地形、海浪以及海洋自身的非均匀结构等复杂多样性环境,往往造成声呐回波中混响呈现非均匀特性,使得背景功率水平估计错误,进而降低了检测(或背景归一化)性能[3]。
为了克服非均匀背景给恒虚警检测带来的影响,国内外学者进行了大量研究[4]。其中,1978年,Trunk[5]提出了单元平均选小 CFAR(Smallest Of CFAR, SO-CFAR)检测算法,1980年Hansen等[6]提出了单元平均选大 CFAR(Greatest of CFAR,GO-CFAR)检测算法。这两种算法通过比较待检测单元两边的平均背景功率水平,然后选择其中一边,前者有效地提高了邻近多目标场景下的目标检测性能,但是虚警控制能力下降;后者有效增强了虚警抑制能力,但是目标检测性能下降。1983年,Rohling等[7]提出了排序统计 CFAR(Order Statistic CFAR, OS-CFAR)检测算法,首先将邻单元的数据进行大小排序,然后选择其中某一个表示估计背景功率水平,该算法在多目标场景中效果优于CA-CFAR,但在均匀高斯背景下有一定的性能损失,同时排序带来了计算量的增加。此外,还有一些检测器通过判决或排序等方式删除疑似目标或强干扰较大的参考单元、或幅度较小的疑似盲区回波[8-9],此类检测器对存在有限个强干扰源或弱回波场景下的检测性能较好,但对于删除或大或小的参考单元的数量无法准确给出。可见,上述检测器只能针对特性非均匀的场景改善检测性能,而对于复杂多样的非均匀环境鲁棒性较差。
上述几类恒虚警检测器对不同的非均匀背景各有一定的改进,但是单独应用时有很多局限性,此后一些研究学者结合某几种简单检测器以提高整体检测的鲁棒性。2008年,郝程鹏等[10]结合OS-CFAR和自动删除单元平均(Automatic Censoring Cell Averaging, ACCA)CFAR提出了OSACGOCFAR检测器。上世纪80年代,有国外学者提出了切换 CFAR(Switching CFAR, S-CFAR)检测算法和可变指数CFAR(Variability Index CFAR, VI-CFAR)检测算法等[11-12]。此类检测器的思想是首先根据一定的准则判断前后窗内参考单元的均匀性,然后自适应选用哪个窗内的参考单元和使用 CA-CFAR、SO-CFAR、GO-CFAR中的某个检测器来完成CFAR检测处理。但是也不能解决前后窗都存在强干扰或多目标的场景下目标检测概率低的问题。2008~2018年,印度海军科学技术实验室的Verma[13]、中国舰船研究院的李壮等[14]、Patel等[15]将 VI-CFAR应用于声呐目标检测中,结果表明,相比较CA-CFAR,VI-CFAR能够改善声呐在多途和混响背景下的检测性能,但仍然存在强干扰或多目标场景下目标检测概率低的问题。同时,由于声呐在浅海环境中,其回波往往存在混响、杂波等非均匀干扰,VI-CFAR在使用单边参考单元进行CA-CFAR时导致产生较多虚警。
本文针对复杂环境下声呐恒虚警检测问题,在VI-CFAR检测算法的基础上,增加了 ACMLD(Automatic Censored Mean Level Detector, ACMLD)和 OS-CFAR检测器,提出了一种鲁棒声呐 CFAR检测算法。该算法改善了VI-CFAR在混响区的虚警抑制能力和多目标/多干扰环境下目标检测能力;同时,该算法在声呐探测中的典型均匀、混响边缘、单离散强干扰、多离散强干扰等多种背景都保持了良好的恒虚警检测鲁棒性。
1 经典恒虚警检测算法
本节将介绍几种经典的恒虚警检测算法,包括CA-CFAR、GO-CFAR、SO-CFAR、OS-CFAR等。
1.1 CA-CFAR检测算法
图1给出了CA-CFAR检测器结构框图。声呐系统在接收K+1个距离维回波数据{xT,x1,⋅⋅⋅,xK}后,需要检测判决CUT有无目标。算法过程如下:
(1) 选取临近CUT的K个参考单元;
(4) 比较CUT单元数据和门限大小,判断目标有无。
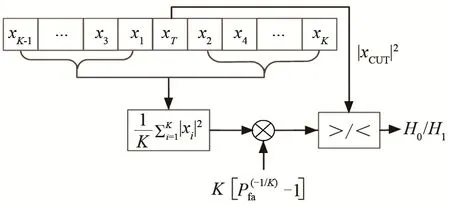
图1 CA-CFAR检测器结构框图Fig.1 The structure chart of the CA-CFAR detector
1.2 GO-CFAR/SO-CFAR检测算法
图2给出了GO-CFAR(或SO-CFAR)检测器结构框图。算法过程如下:
(1) 将邻近CUT单元分为前后两部分,分别计算其背景功率水平β1、β2:

其中,Ω1={x1,x3,…,xK−1},Ω2={x2,x4,…,xK}。
(2) 然后选取较大(或较小)的值为背景功率;
(3) 利用门限因子计算检测门限TGO、TSO:

其中,αGO和αSO分别为GO-CFAR和SO-CFAR的门限因子,与设定的虚警概率分别满足关系式:

(4) 最后比较门限与CUT值,判断目标有无。

图2 GO-CFAR/SO-CFAR检测器结构框图Fig.2 The structure chart of the GO-CFAR/SO-CFAR detector
1.3 OS-CFAR检测算法
图3为OS-CFAR检测器结构框图。其基本思路如下:
(1) 将参考单元升序排列;
(2) 选取排序后第k,k∈{1,…,K}个元素x(k)代表背景功率水平,通常取值k=3K/4[16];
(3) 利用门限因子计算门限TOS=αOSx(k),其中,αOS与预先设定Pfa的满足关系式(5);
(4) 比较 CUT单元数据和门限大小,判断目标有无。

其中,符号Γ(⋅)表示伽马(Gamma)函数。

图3 OS-CFAR检测器结构框图Fig.3 The structure chart of the OS-CFAR detector.
2 鲁棒的声呐CFAR检测算法
由于经典CFAR检测算法在复杂声呐探测环境中鲁棒性较差,文献[13-14]将VI-CFAR应用于声呐目标检测中,仿真结果表明,相比较 CA-CFAR,VI-CFAR能够改善声呐在多途和混响等非均匀背景下的检测性能。但是,VI-CFAR在声呐检测中的应用仍然存在一些问题:
(1) VI-CFAR采用简单的二阶统计量VI检验背景参考单元的均匀性,针对瑞利分布等简单背景分布模型,能够取得较好的判决效果。但对于对数正太(Lognormal)分布[4]、K分布等复杂环境,判决效果往往较差,可见,VI-CFAR对背景均匀与非均匀性的检验仍存在很大局限性。
(2) 当待检测单元前后参考窗一个为“均匀”,一个为非均匀时,VI-CFAR只利用均匀参考窗估计背景功率,并使用 CA-CFAR,但由于声呐水声环境的复杂性,可能导致目标丢失。其实质是待检测单元与判决的“均匀”参考窗并非完全均匀。
(3) 当前后窗都是非均匀时,VI-CFAR选择SO-CFAR检测器。此时,如果前后窗都存在强离散混响干扰点,则目标检测性能仍然很差。
本文主要针对问题(2)和(3),改进文献[12]中的VI-CFAR检测器,并应用在声呐水声探测中,提出基于背景统计的的恒虚警检测(based on Background Statistics Characteristics Robust CFAR,BSCR-CFAR))算法。其结构框图如图4所示。

图4 本文提出的BSCR-CFAR检测器结构框图Fig.4 The structure chart of the proposed robust BSCR-CFAR detector
图4中,假设声呐系统接收K+1个距离维回波数据,其中,CUT前1,…,K/2 表示为前窗(F),K/2+ 1,… ,K参考单元为后窗(B)。
首先计算前、后窗背景噪声功率水平均值:

计算前、后窗背景功率和背景功率均值之间的统计量,称为VI统计量或可变指数统计量:


判决前、后窗参考单元数据是否均匀:如VF(或VB)≤cVI,VF(或VB)为均匀;如VF(或VB)>cVI,VF(或VB)为非均匀。其中,cVI为判断前后窗F、B是否背景均匀的因子,通常根据实际数据和参考窗大小等找到合适的值。
计算均值比(Mean Ratio)统计量RM:

其中,cMR表示检验前后窗均匀性是否一致的常数。
然后,根据背景统计特性参数VF(或VB)和RM及其判决结果,选择匹配的检测器,如表1所示。

表1 不同背景统计特性下BSCR-CFAR的匹配检测器选择Table 1 The selection of matched detectors for BSCR-CFAR under different background statistical characteristics
由表1可知,针对均匀背景,即场景1,选择CA-CFAR;而针对混响杂波边缘背景,即场景2,选择 GO-CFAR能够更好地抑制边缘处虚警的产生;而针对VI-CFAR在声呐探测中遇到的问题(2),BSCR-CFAR检测器在相应的场景 3、4中,选择ACMLD,该算法能够适当删除引起非均匀的强离散混响参考单元,充分利用更多的参考单元数据;场景5表示前后窗都为非均匀背景,说明前后窗可能存在多个强干扰(或多目标),此时,BSCR-CFAR选择OS-CFAR检测器。
3 算法性能数值分析
本节将利用蒙特-卡洛(Monte-Carlo)仿真和声呐实测数据对提出的BSCR-CFAR检测算法性能进行分析验证。
3.1 仿真数值分析验证
假设参考单元数K=50,则前、后参考窗分别有 25个参考单元,均匀背景服从瑞利分布,瑞利参数为3;非均匀混响/杂波边缘背景下前参考窗参考单元瑞利参数为1[4],后窗参数为3,CUT的瑞利参数为3,单强离散杂波/混响干扰参考单元干噪比(Interference Noise Ratio, INR)为20 dB,多强离散杂波/混响参考单元分布在前后窗中且INR为20 dB。目标和强离散源都服从Swerling1模型[4],理论虚警概率设置Pfa={10−2,10−3,10−4,10−5}。为了避免不同理论Pfa下固定蒙特卡洛数对实际Pfa评估带来的不公平误差,蒙特卡洛数为100/Pfa。根据瑞利分布参数,强混响区域(瑞利参数为 3)比弱混响区域强约13 dB。SO-CFAR、GO-CFAR和OS-CFAR检测器对应的门限因子(门限因子计算参见第1节)如表2所示,BSCR-CFAR中均匀性判决门限设置为cVI= 3,cMR=1.8。

表2 不同虚警概率设置下各检测器对应的门限因子Table 2 Threshold factors of different detectors for different false alarm ratio setting
图5为均匀水声探测背景下,BSCR-CFAR和CA-CFAR检测器的检测性能曲线。图5(b)中Pd表示目标检测概率。

图5 均匀背景下BSCR-CFAR和CA-CFAR的检测性能曲线Fig.5 The detection performance curves of BSCR-CFAR and CA-CFARdetector under homogeneous background
可见,BSCR-CFAR检测器在均匀背景(瑞利分布)下,其虚警控制曲线和目标检测曲线与CA-CFAR一致,而CA-CFAR在瑞利分布的均匀背景下检测性能最优。
实际声呐检测中,混响/杂波边缘处由于背景功率的骤然起伏变化,很容易出现虚警点,严重影响后续决策。图6为BSCR-CFAR在不同理论虚警概率下的实际虚警控制性能曲线。

图6 混响/杂波边缘背景下不同检测器虚警控制的性能曲线Fig.6 The performance curves of false alarm control for different detectors under reverberation or clutter edge background
由图6可见,混响边缘严重降低了CA-CFAR的虚警控制性能,失去恒虚警特性。BSCR-CFAR与GO-CFAR性能曲线一致。而GO-CFAR是经典检测算法中虚警控制能力最好的。
声呐在浅海工作时,探测回波中往往存在很多由海底起伏地形、海底设施等引起的强离散混响/杂波干扰点,很容易遮蔽附近的弱小目标。另一方面,多目标背景也存在类似的目标遮蔽现象。这些都降低了传统检测器的目标检测性能。
图7为BSCR-CFAR在不同目标信噪比(Signal Noise Ratio, SNR)下的目标检测性能曲线。
图 7(a)中,有一个强干扰点位于前(或后)参考窗中。此时,经典的CA-CFAR目标检测性能较差,GO-CFAR目标检测性能最差,而BSCR-CFAR的目标检测性能接近于SO-CFAR,性能最优,因为此时 BSCR-CFAR 在大部分蒙特卡洛仿真下选择了ACMLD,能够删除强干扰点,同样SO-CFAR此时选择了没有干扰的参考窗。在图7(b)中,前后参考窗都含有强干扰,此时,SO-CFAR与CA-CFAR选择的参考单元数据中都含有干扰,所以目标检测性能较差。而BSCR-CFAR和OS-CFAR能够通过排序、删除等操作剔除多干扰点,目标检测性能最优。克服了强离散干扰和多目标背景下的目标遮蔽效应。

图7 强离散干扰(或多目标)背景下各检测器目标检测性能曲线Fig.7 The target detection performance curves of different detectors under strong outlier or multi-target background
实际声呐检测时背景很复杂,考虑一个参考窗中包含强离散干扰,而另一个参考窗包含强混响区域。假设CUT后参考窗内存在强混响区,共15个单元,其瑞利参数设置为 3,前参考窗内包含一个强离散干扰点,其 INR为 20 dB。图 8为 BSCRCFAR在不同 SNR下的目标检测性能曲线,并与CA-CFAR和VI-CFAR检测器进行了对比。

图8 强离散干扰和强混响背景下各检测器目标检测性能曲线Fig.8 The target detection performance curves of different detectors under strong outliers and strong reverberation background
图8中,CA-CFAR目标检测性能最差。根据考虑的参考单元背景,此种情况,VI-CFAR易只选择后窗为参考单元,选择CA-CFAR检测器,尽管舍弃了强离散干扰,但仍难以避免强混响区对目标的遮蔽。而BSCR-CFAR选择ACMLD,此时目标检测性能最优。
3.2 实测数值分析验证
本节利用主动声呐实测数据分析复杂水声背景下BSCR-CFAR的检测性能,为便于蒙特卡洛分析,下面的离散混响/杂波等干扰点为仿真。各检测器门限因子与3.1节中设置相同,虚警概率设置为10-3,蒙特卡洛10 000次。
3.2.1 混响边缘的虚警抑制性能
归一化后的实测数据检测场景如图9所示,其中,假设左侧1~200个距离单元为混响区域,图9左侧混响区混响噪声比(Reverberation-Noise-Ratio,RNR)相比右侧大10 dB时,CUT位于混响边缘第200个距离单元,保护单元数为 200,参考单元数为50。

图9 混响边缘场景的主动声呐检测示意图Fig.9 Schematic diagram of active sonar detection in the scene of reverberation edge
图10为BSCR-CFAR检测器在不同RNR下的虚警抑制性能曲线,并与CA-CFAR、GO-CFAR和OS-CFAR检测器进行了对比。

图10 各检测器在不同混响-噪声比(RNR)的混响边缘背景下的虚警控制性能曲线Fig.10 The performance curves of false alarm control for different detectors under reverberation edge background of different reverberation to noise ratios
从图10可以看出,CA-CFAR和OS-CFAR在强混响边缘的虚警抑制性能相近,在RNR达到20 dB时,虚警概率接近100%。而BSCR-CFAR和GO-CFAR的虚警概率接近0。这主要是因为BSCRCFAR和GO-CFAR在混响边缘处,选择了背景功率较大的一侧为估计的背景功率,有利于抑制虚警点,说明二者在混响边缘的虚警抑制性能最优。
3.2.2 单参考窗强混响目标检测性能
图 11为包含目标的声呐实测数据,其中,目标真实 SNR为19 dB。归一化后的实测数据及目标检测场景如图11所示,设置单离散强干扰/混响场景中在左侧参考单元内加入强干扰源,假设干扰点满足Swerling1起伏模型,图中干噪比为20 dB。
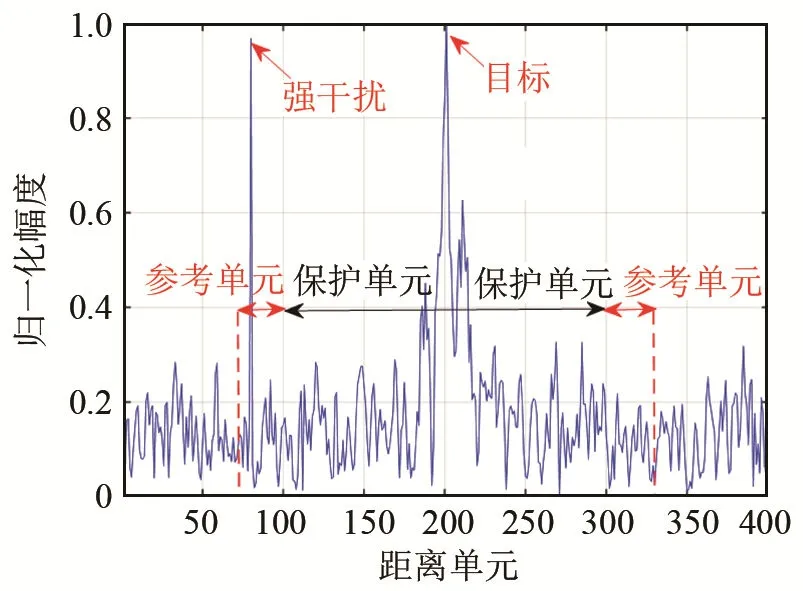
图11 参考窗内出现单离散强干扰场景下主动声呐检测示意图Fig.11 Schematic diagram of active sonar detection in the scene of single outlier within a reference window
图 12为单离散强干扰背景下各检测器的目标检测性能曲线。由图12可见,在强干扰环境下(INR大于15 dB),CA-CFAR和GO-CFAR对目标检测概率开始下降,出现目标遮蔽效应,特别是双干扰达到 40 dB时,基本检测不到真实目标,而BSCR-CFAR和OS-CFAR依然能够保持 100% 的目标检测概率。这主要是因为BSCR-CFAR和OS-CFAR在离散干扰背景下,检测器首先对参考单元数据进行排序,然后选择3/4处数据为估计的背景功率[16],避免了选择离散强干扰,说明OS-CFAR和BSCR-CFAR能够有效解决单强离散干扰等造成的目标遮蔽效应。

图12 各检测器在不同干扰噪声比(INR)的单离散强干扰背景下的目标检测性能曲线Fig.12 The performance curves of target detection for different detectors under single interference background of different interference to noise ratios
考虑单参考窗中存在多个强离散混响/杂波等干扰源,如图13所示,将图10中参考单元内部分区域回波加强,假设为强混响区域,图13中RNR为15 dB。目标检测性能曲线如图14所示。
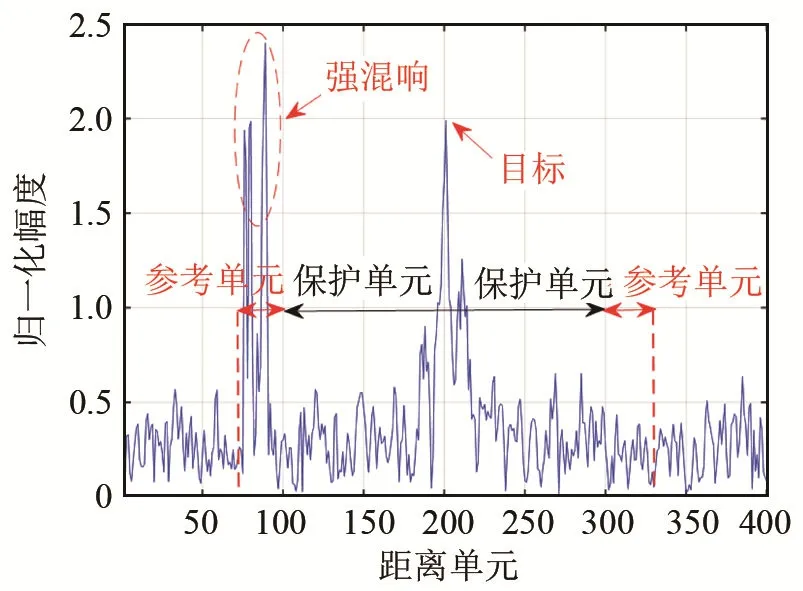
图13 参考窗内出现强混响场景下的主动声呐检测示意图Fig.13 Schematic diagram of active sonar detection in the scene of strong reverberation within a reference window

图14 各检测器在不同混响噪声比(RNR)的强混响背景下的目标检测性能曲线Fig.14 The performance curves of target detection for different detectors under strong reverberation background of different reverberation to noise ratios
可见,BSCR-CFAR检测器在单参考窗中强混响单元数达到15时(参见图13,单参考窗中总计25个单元),总体目标检测性能仍然最优,尤其在RNR增强后,BSCR-CFAR由于能够选择合适的参考单元(右侧区域),检测概率接近 100%。另外,OS-CFAR在杂波边缘的总体目标检测性能都要优于CA-CFAR。
考虑一个参考窗中存在一个强离散干扰源,而另一个参考窗中存在强混响干扰区(包含多个混响干扰),如图 15所示。目标检测性能曲线如图 16所示。
可见,随着强干扰和强混响区的 INR逐渐增强,CA-CFAR、VI-CFAR等检测器的目标检测性能急剧下降,而 BSCR-CFAR检测器在 INR达到30 dB时,其目标检测概率依然能够保持在80%以上。主要原因是前参考窗包含离散强干扰,而后参考窗中包含部分强混响区回波(属于混响区的参考单元数据较多),根据BSCR-CFAR和VI-CFAR背景判决原理,二者依然判决图15为检测“场景4”(参见表1)。此时,前者选择的 ACMLD,能够有效地自动删除强混响点和离散强干扰,而 VI-CFAR选择的CA-CFAR检测器由于强干扰和强混响的存在,形成目标遮蔽效应,形成检测性能严重降低。

图15 参考窗内出现单离散强干扰和强混响场景下的主动声呐检测示意图Fig.15 Schematic diagram of active sonar detection in the scene of single outlier and strong reverberation within a reference window

图16 各检测器在强混响和不同干扰噪声比的单离散强干扰背景下的目标检测性能曲线Fig.16 The performance curves of target detection for different detectors under the background of strong reverberation and single interference of different interference to noise ratios
3.2.3 多强干扰下的目标检测性能
考虑前、后参考窗同时包含强离散混响/杂波等干扰源的声呐目标检测场景,如图 17所示,多干扰场景中,在左右两侧的参考单元内同时加入强干扰点,假设干扰源都满足 Swerling1起伏模型。目标检测性能曲线如图18所示。

图17 参考窗内出现多离散强干扰场景下声呐检测示意图Fig.17 Schematic diagram of active sonar detection in the scene of multiple outliers within a reference window

图18 各检测器在不同干扰噪声比的多离散强干扰背景下的目标检测性能曲线Fig.18 The performance curves of target detection of the detectors under multiple interference outliers background of different interference to noise ratios
在强干扰环境下,CA-CFAR检测器的目标检测概率随着INR的增强逐渐下降,特别是双干扰达到32 dB以后,基本检测不到真实目标。同样地,SO-CFAR(VI-CFAR检测器在此场景下选择SO-CFAR检测器)略好于CA-CFAR,但仍然无法避开离散强干扰,所有目标检测性能随着INR的增强逐渐下降,而BSCR-CFAR和OS-CFAR由于采用了排序方法,选择参考单元样本排序后3/4处数据为估计的背景功率水平,避开了强离散干扰点,所以仍然能够保持100%的目标检测概率(详见第1、2节OS-CFAR与BSCR-CFAR检测原理),说明提出的BSCR-CFAR能够有效避免目标遮蔽效应。
综上所述,相较于传统经典 CFAR检测器和VI-CFAR检测器,BSCR-CFAR能够在均匀、混响边缘、单参考窗离散强混响/杂波干扰以及多干扰(或多目标)等复杂水声环境中保持良好的目标检测和虚警抑制性能,展现了在复杂水下背景的恒虚警检测鲁棒性。
4 结 论
本文提出了复杂非均匀背景下鲁棒的声呐目标恒虚警检测算法,即BSCR-CFAR检测器。其在均匀、强离散单干扰、单强干扰和混响区、多干扰(多目标)、混响/杂波边缘等复杂多样水声背景中均展现了良好的鲁棒性。
但BSCR-CFAR检测算法仍然存在一些问题,如背景均匀判决、更匹配的检测器选择等,后续可借助辅助知识(比如海底地形等)和AD检验、KS检验等,进一步改善均匀性参考单元判决和选择。
