基于可见光携能通信的线性迭代定位算法
2021-01-08冯人海常燕燕葛磊蛟杨爱超
冯人海,常燕燕,葛磊蛟,杨爱超
(1. 天津大学电气自动化与信息工程学院,天津 300072;2. 天津大学微电子学院,天津 300072;3. 国网江西省电力有限公司供电服务管理中心,南昌 330032)
电网规模的不断扩大提高了对高压输电线巡检的实时性要求[1].传统的人工巡检方式因成本高、效率低而受到较大制约,因此无人机巡检在电网维护与检修中发挥了重要作用[2].但是高速移动的无人机受多普勒效应影响较大,且高压输电线路受风力、附近电磁干扰等外界环境影响,导致接收机不能准确接收信号.可见光通信(visible light communication,VLC)凭借绿色安全、无电磁污染和频谱无需授权等优势[3],成为解决此问题的新兴手段.
VLC 利用发光二极管(light emitting diode,LED)作为光源,通过高速明暗闪烁的信号传递信息.结合VLC 和无线能量传输技术,为基于微能量收集的无线传感器的自供能技术提供可能,从而可实现信息与能量的同时无线传输[4].目前,半导体照明普及率高达80%[5],成本低、绿色低碳,且可见光具有良好的光学透明度,便于能量收集[6],符合国家节能减排战略,有利于促进经济健康可持续发展,是“十一五”以来推进电力系统行业节能减排的重要战略举措[7-8];同时由于发射端基于白光LED 承载信息,无电磁污染,可用于电网、核电站、医疗设备等对电磁干扰敏感的环境中,保密性好且对人体安全无辐射.而且,VLC 的一次能量集中在视线链路(line of sight,LOS)上,受多径干扰及其他无线手持设备的影响很小,定位精度高[9].因此无人机可见光通信可解决复杂电磁干扰环境下电网的巡检工作.
通过VLC 技术对发射光源进行准确定位是电网巡检的前提.近年来,国内外学者对VLC 的定位算法做了大量研究.文献[10]通过比较系统的误码率得出,波束成形技术会明显提高系统定位精度.文献[11]为克服码间干扰,提出一种基于码分多址调制的可见光定位算法.基于到达时间差(time difference of arrival,TDOA),文献[12]为每一个光源分配独特的频率地址对目标位置进行估计.上述文献虽然在一定程度上提高了定位精度,但过程复杂,对发射和接收系统要求高,不能实时追踪和匹配复杂多变的信道环境.
针对以上问题,本文首先分析VLC 的定位系统模型,提出四棱台的接收机结构,通过探索接收功率和相对位置给出使用多接收机定位的通用模型.相比于传统的平面接收机阵列,本文提出的结构使得接收机可以接收多个方向的光能,从而降低了信道间的相关性,有利于提高分集增益;基于系统模型,逐步推导线性迭代定位算法,该算法通过泰勒公式对隐函数线性化,避免了传统复杂的非线性方程的求解,提高了计算速度,更适合电力系统的实时巡检;同时为提高定位精度,本文将系统噪声和测量噪声考虑在内,并结合隐马尔可夫模型(hidden Markov model,HMM)进行在线去噪.最后与传统方法进行对比分析得出,所提算法提高了系统的实时性和定位精度.
1 系统模型
本文采用非成像定位系统[13-14]:发射机发射光信号,无人机值守并定位发射光源.即相当于单LED作为发射源,其光强由无人机接收,接收机由安装于四棱台的 5 个光电二极管(photodiodes,PDs)组成.VLC 定位系统模型如图1 所示.
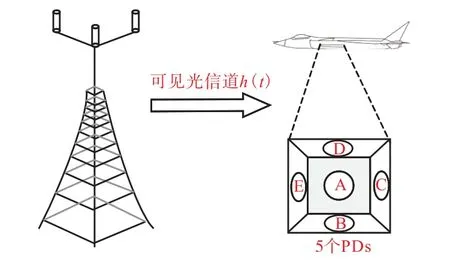
图1 VLC定位系统模型Fig.1 Model of VLC positioning system
如图1 所示,发射信号在可见光信道 h ( t) 中传输,通过接收端PDs 接收到的不同光强实现定位.接收机所采用的四棱台结构可以多方位接收光能,利于提高分集增益.设发射和接收信号分别为 X ( t) 、Y ( t ),发射和接收功率分别为 Pt、Pr,则存在关系

式中T 为发射信号周期.接收信号的噪声模型为

式中:r 为光电转换效率;η ~ N(0,σ2)为信道噪声.
1.1 光源和接收机模型
本节以单光源单接收机为例,分析说明光源和接收机模型.如图2 所示.
图2 中,mS和mR分别代表LED 和PD 的位置,距离 dR可以用范数表示为

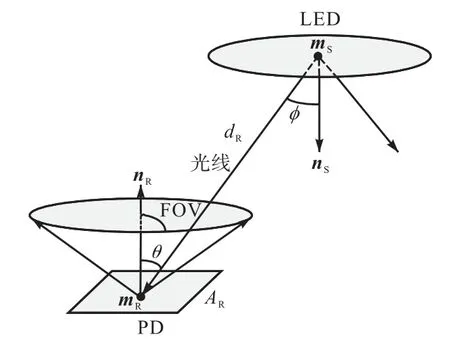
图2 LED和PD的位置关系Fig.2 Position relationship between LED and PD
把 LED 视为点光源,光线服从朗伯发光模型[15-16]. 其由位置向量mS、单位法向量Sn 和发射角φ 以及朗伯辐射系数n 共同决定,即

式中n 与光源的半功率强度角 φ1/2有关,满足

相应地,接收机由位置向量mR、单位法向量 nR和接收角θ、视场角FOV 以及接收面积 Sr决定,即

1.2 信道模型
承载数据的可见光在自由空间中传输,传输距离远大于接收机光敏面的尺寸[17],因此为补偿数据在空间传播的衰减,接收端通常需要透镜聚焦(设g 为透镜聚光增益),再经过PD 的光电转换后解调恢复原始信号.
设LED 中心发光强度为 I0,则沿发射角φ 方向的光强为

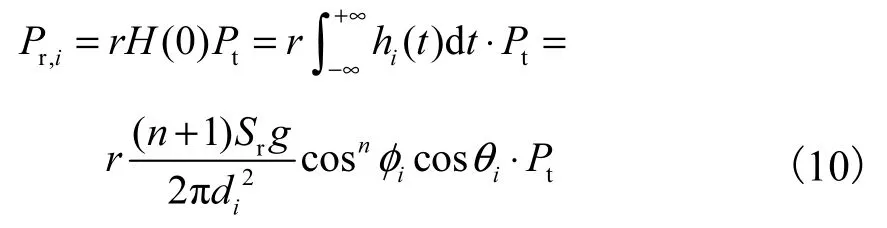
因此,接收光强可表示为

记单个LED 和第i(1≤i≤ 5,i ∈N+)个PD 之间信道冲激响应为 hi( t ),结合式(8)有

2 光源定位算法
在图1 的系统模型中,利用3 个PDs 即可实现光源的定位.以下说明定位原理.
图1 的纵截面如图3 虚线部分所示.设截面上下底面长度分别为2 cm 和4 cm,底角为α .任意选取A、B、C 3 个接收机,以四棱台底面中心为原点建立坐标系.
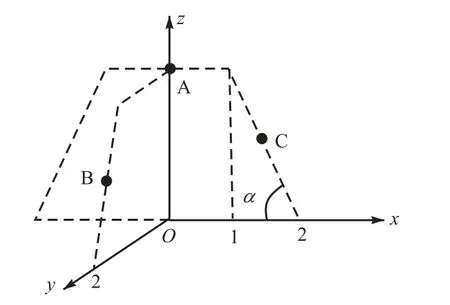
图3 3个PDs在坐标系中的位置Fig.3 Positions of three PDs in coordinate system
由图3 可建立A、B、C 3 个接收机的相对位置模型:
(3) 设接收的光功率分别为 Pr,A、Pr,B、Pr,C,同时设待测光源位置,从而可得光源到3 个接收机的位置向量.
2.1 三角定位算法
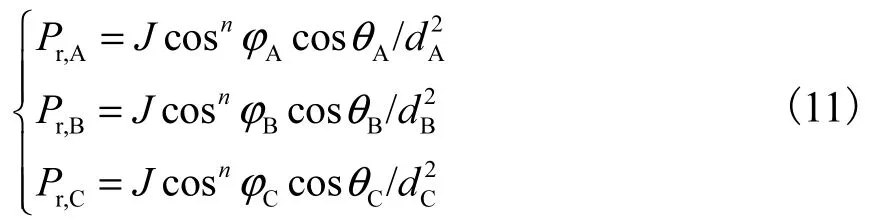
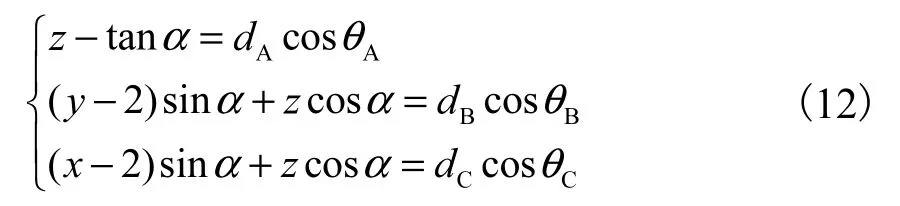
综合式(11)、(12)可定位到光源位置,即
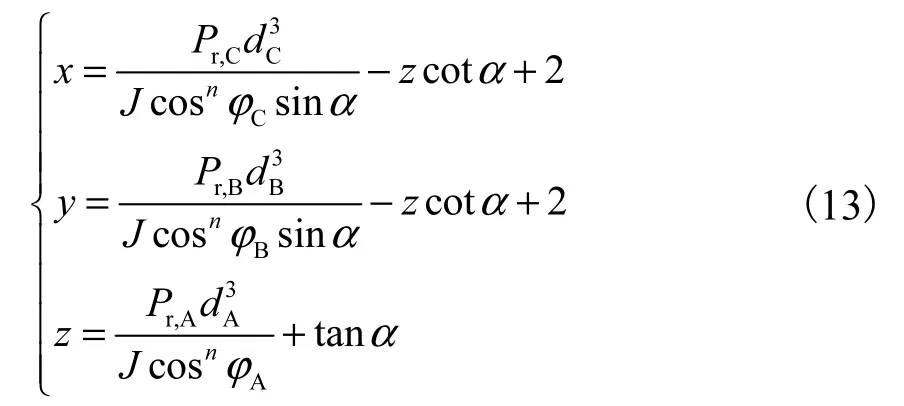
由此可知,在接收机尺寸α 已知时,通过测量3 个PDs 的接收光功率,即可实现光源定位.但式(13)由隐函数组成,计算量大且求解不唯一.为降低计算复杂度,继续提出线性迭代定位算法.
2.2 线性迭代定位算法
基于多元函数的泰勒展开定理,对式(13)进行等价变换得到线性迭代定位算法.并记式(13)确定的3个隐函数分别为,进行1 阶泰勒展开并写成矩阵形式为
2.3 HMM在线去噪
输电线路担负着输送电力的重要任务,考虑到实际工作环境中所受噪声的影响,本文将噪声分为两类:系统噪声和测量噪声.输电线不可避免地受到风、雨、高温等恶劣天气的影响,导致出现断裂、生锈腐蚀以及过热等情况[2].这些情况下若满足Peek 公式,即达到起晕场强时[18],高压输电线会因电晕放电而产生无线电干扰[19],因此系统噪声主要考虑无线电引起的干扰;同时,测量噪声由通信过程中的随机干扰引起.此外,由于在架设高压线时工程师们考虑了线路的优化问题且VLC 无电磁污染,因此本文暂不考虑输电线路产生的工频电磁场干扰[20].
为降低两种噪声对定位精度的影响,与文献[21]通过注入空气阻尼改善环境噪声的方式不同,本文将两种噪声建模为高斯白噪声[22],通过数字信号处理方式实现在线优化,即在线性迭代算法的基础上,使用HMM 进行在线去噪.相关算法如下.
1) 参数初始化
设系统噪声 w(t) 和测量噪声 v(t) 是彼此不相关且方差分别为Q 和R 的高斯白噪声,即

式中Q 取决于干扰场强的大小,其计算式为

式中:E 为0.5 MHz 时的干扰场强,可根据文献[18]确定;f 为干扰频率.
系统状态矢量(也称隐状态)为

输入控制矢量(也称测量状态)为
2) 状态空间模型

3) 周期循环迭代
(1)一步预测:暂时忽略式(19)中系统噪声的影响,利用 t −1 时刻的系统状态预测t 时刻的状态.


对式(22)求协方差得



因此测量噪声被考虑到权重系数中,从而在不断迭代过程实现在线去噪.接下来,为确保 t+1 时刻可以继续迭代,对估计误差协方差进行更新得

4)输出
3 模拟仿真分析
本节模拟光源定位算法.在仿真中,LED 布置在高度为3 m 的自由空间中;PDs 分散在四棱台各个面的中心位置,且接收机平台置于地面.LED 发送对应于不同物理位置的信息,接收端通过PDs 提取光强信息来实现定位.系统噪声和测量噪声服从高斯分布.
通过Matlab 对所提出的定位算法进行仿真.设置仿真参数如表1 所示.

表1 仿真参数Tab.1 Simulation parameters
3.1 定位算法分析
设光源沿回形曲线从(0.25,1.75,3.00)到(1.75,0.25,3.00)移动,定位结果与文献[11]进行比较,如图4所示.
从图4 理想坐标与定位坐标的相对位置可以看出,定位坐标和理想坐标非常接近,特别是对于定位区域中间的位置.这是因为中间位置相对于定位边缘的光源发射角小且传输距离近,结合式(7)和(8)可知信道对光信号的衰减程度小,定位准确度高.然而,本文所提出的算法测量误差可控制在6 cm 范围之内,文献[11]仅有75%的数据满足此要求;此外,本文的最大误差约为5.52 cm,相比于文献[11]的误差9.50 cm,定位准确度得到了有效改进.
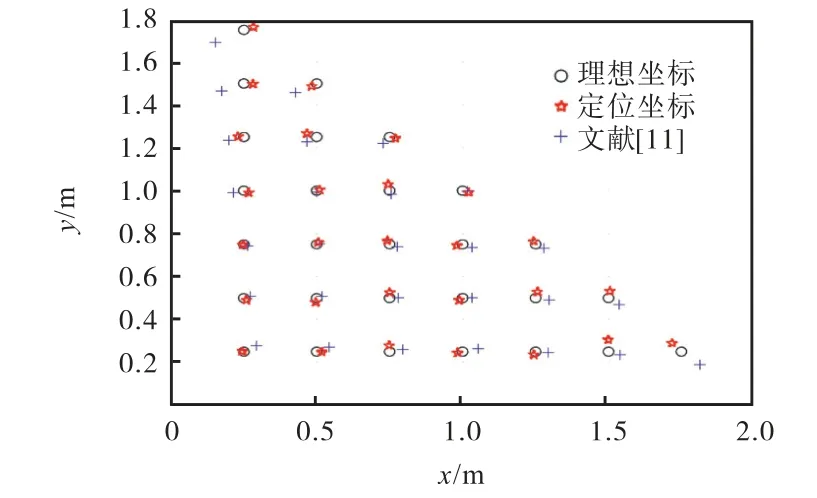
图4 理想坐标与定位坐标的相对位置Fig.4 Relative positions of ideal and positioning coordinates
接下来考虑定位算法的执行效率问题.分别采用不同算法执行20 个点的定位,各算法执行时间如图5 所示.
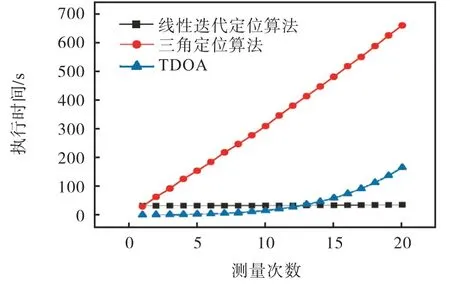
图5 不同算法的执行时间对比Fig.5 Execution times of different algorithms
由图5 可以看出,在测量次数低于13 时,文献[12]中TDOA 算法性能优于本文所提算法.然而,就增长速度而言,本文提出的两种算法较TDOA 更低,即执行时间不会随着测量次数的增多而指数型增长,从而确保了定位的效率.此外,三角定位算法执行时间与测量次数成正比,随着测量次数增多,这种算法也会消耗大量时间,实时性依旧不能得到保证.而线性迭代定位算法能很好地解决这一问题,因其只有固定开销,测量次数基本不会影响其计算速度,执行效率高效更加适用于电网巡检.
3.2 去噪性能仿真
设理想坐标为(2.0,1.5,3.0),通过第2.3 节HMM在线去噪算法进行仿真测试,如图6 所示.相比于第2.2 节的迭代计算结果,经HMM 的估计值更接近于真实值,其90%的数据点测量误差控制在5 cm 范围之内,有效提高了系统测量性能,原因如下.
(1) 状态空间模型:HMM 将状态变量引入滤波理论,建立了消息与干扰之间的状态空间模型,将噪声引入优化算法,从而提高测量精度.
(2) 递推算法:状态空间模型与离散时间更新紧密联系,可在不求滤波器冲激响应的情况下,根据前一个时刻的估计值纠正当前时刻的测量值,得到当前时刻的最佳估计,完成电网巡检的实时追踪.
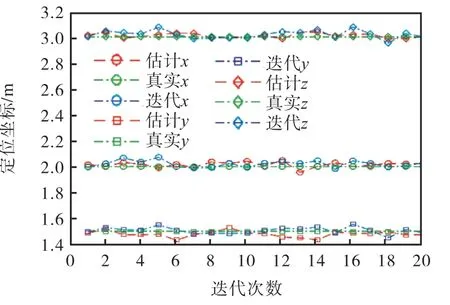
图6 HMM和线性迭代定位算法效果对比Fig.6 Comparison between HMM and linear literative location algorithm
(3) 采用递推算法,计算量小,实时高效.
4 结 语
VLC 绿色低碳,是建设资源节约型、环境友好型社会的有效举措.基于VLC 系统,本文提出将其与无线能量传输技术结合实现微能量收集,重点提出线性迭代定位算法,为高压输电线路巡检提出一种可行的光源定位方案.
该算法利用点对多点的通信,基于距离和角度,通过探测不同位置PDs 的接收功率,结合泰勒定理和隐函数存在定理,并使用HMM 去噪优化定位结果.仿真结果表明,线性迭代算法的误差在6 cm 范围之内,经过HMM 的在线去噪处理,90%的数据误差可控制在5 cm 范围之内.同时指出,发射角和距离是影响接收信号强度和定位准确度的主要原因.
本文方法具备高压输电线巡检的定位功能,且对检测人员专业性要求不高,定位与分析过程简单可靠、实时性高.在电力系统方面,可以继续开展基于不同接收时延的定位算法研究;同时通过收集光能,也可进一步开展对能量收集器的设计.