植保机钟摆式喷杆主动悬架自适应模糊控制
2021-01-07李茂源李树江郭爱静
李茂源,李树江,郭爱静
(沈阳工业大学 信息科学与工程学院,沈阳 110870)
0 引言
化学农药是十分重要的农业生产资料之一,化学农药的喷洒一直以来都是农作物保护的重要途径和措施[1]。喷杆式喷雾机是一种在世界范围内广泛应用于大田植保作业的植保施药机具。喷杆式喷雾机一般具有较长的喷杆,喷洒范围宽,但长喷杆在田间作业时由于路面不平整等不确定因素会产生倾斜、振荡等非期望运动,导致喷杆与农作物冠层间高度不断变化,影响喷药分布的均匀性,出现过喷或漏喷,有时甚至会导致喷杆与作物碰撞,喷杆折断,严重影响作业效率[2-4]。
在喷杆与喷雾机之间设立悬架可以提高作业时喷杆的稳定性,被动悬架可将喷杆与喷雾机车体的运动状态隔离开以帮助喷杆过滤掉由于地面不平整和车体振动所带来的外部高频扰动[5-7]。为使悬架具备主动悬架功能,在其上加装作动液压缸是一种有效的方法,从而获得喷杆主动悬架。液压缸具有体积比小、输出力大、功率重量比高等优点,广泛应用于现代工业的各个领域[8-10]。针对喷杆姿态的主动控制,崔龙飞等基于比例控制建立了双钟摆主动悬架系统模型,揭示了系统结构参数对响应特性的影响,指导了悬架参数的科学配置[11],但这只属于悬架结构参数的优化;薛涛等针对高地隙喷雾机的喷杆主动悬架系统设计了自适应模糊滑模控制器,可以很好地隔离干扰性的车身摆动[12],但并未具体考查系统参数变化对控制效果的影响;此外,很多基于硬软件开发实现的喷杆位姿主动控制[13-15]多存在抗扰能力差、控制精度不足的问题。在面对系统模型具有非线性、不确定性以及参数时变性时,自适应模糊控制可以发挥良好的控制性能,对系统参数变化的敏感性低,并具备良好的鲁棒性[16-18]。
综上所述,本文针对一种结构简单且应用广泛的钟摆式喷杆主动悬架系统[19]进行研究,建立其数学模型,针对系统本身和田间路面环境存在的不确定性和时变性,设计了一种基于输入输出线性化的间接自适应模糊控制方法[20],使悬架在保留被动悬架功能的同时喷杆可以精准跟踪地面的低频坡角变化,保持喷杆的稳定性,且当系统参数发生时变或系统受到外部干扰时,控制器能够具有良好的自适应性以及鲁棒性,并通过仿真验证了控制效果。
1 主动悬架系统模型建立
1.1 系统基本方程
植保机钟摆式喷杆主动悬架结构如图1所示,由喷杆、吊杆、液压缸以及与植保机车体相连的车架组成。吊杆的一端连接在车架上,另一端连接在喷杆的重心位置,这样吊杆就会靠自身重力作用来实现喷杆被动悬架的功能,抑制高频扰动;当植保机行驶在不平路面时,通过给液压缸输入控制电压,使液压缸内活塞杆伸缩,调整吊杆与喷杆之间的夹角,进而也就调节了喷杆与地面间的角度,使喷杆与地面平行。
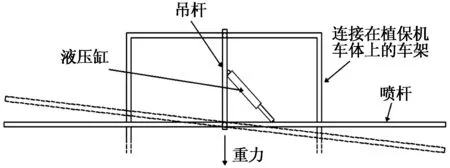
图1 钟摆式主动悬架
采用第二类拉格朗日方程对钟摆式喷杆主动悬架系统进行动力学建模:
(1)
其中:T是系统动能,t为时间,qj是广义坐标,运算符d表示全导数,运算符∂表示偏导数,Qj是对应于qj的广义力。
用向量方式将系统的封闭运动链进行几何描述,如图2所示。
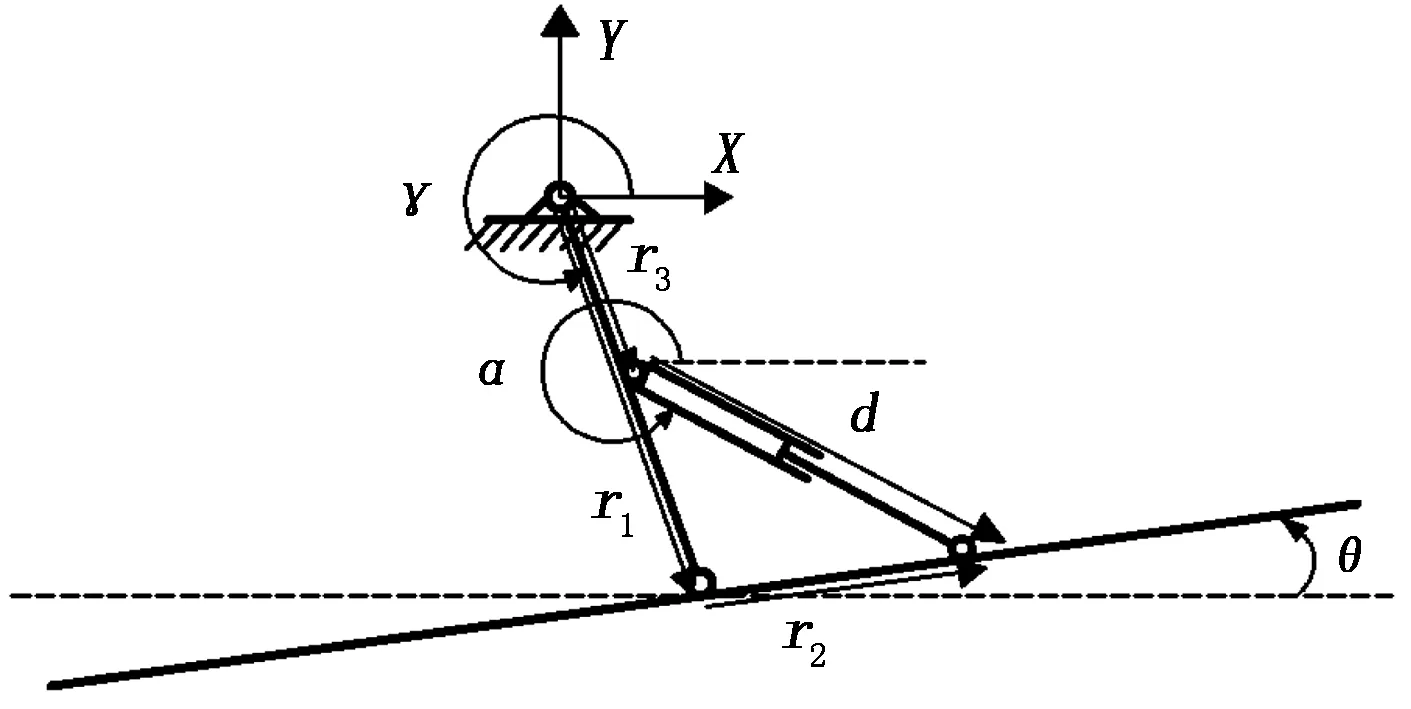
图2 喷杆主动悬架系统几何描述
由拉格朗日乘子,得到一组受约束的运动方程:
r1+r2-d-r3=0
(2)
其中: 矢量ri(i=1,2,3)对应于长度固定的连杆,矢量d对应于包含液压缸的长度可调连杆。
将系统中的各矢量根据x轴和y轴进行投影,再经过线性化,整理后得到下列方程:

(3)

(4)
其中:ri0是|ri|,d0是|d|,α、γ、θ和d表示围绕各自设置点的变化量。为了计算公式(1),还需要计算动能T和广义力Qj,表达式如下:
(5)
Qθ=-mgr1(a1d+a2θ)
(6)
Qd=F-mgr1(a3d+a4θ)
(7)
其中:I和m分别为喷杆的转动惯量和质量,g是重力加速度,Qθ是与喷杆倾角θ相关的广义力,Qd是与液压缸长度变化量d相关的广义力,参数ai(i=1,2,3,4)为线性化常数,F为液压缸对喷杆的作用力,其值随系统工作状态的不同在会一定范围内变化。
根据式(1)~(7),得到钟摆式主动悬架系统运动方程如下:
(mgr1a4)θ+(mgr1a3)d=F
(8)
(mgr1a2)θ+(mgr1a1)d=0
(9)
1.2 系统模型状态空间描述
将主动悬架系统中液压缸的伸缩过程考虑为一阶积分环节,控制电压u作为其输入,有:
(10)
其中:Ti为动态时间常数,kv为阀芯增益系数。
(11)
由式(11)可以看出,该系统的输入为液压缸控制电压u,输出为喷杆相对于水平面的倾角θ。F为不确定时变参数,时间常数Ti和增益kv也存在不确定性。因此,克服系统的各种不确定性和时变性,使输出θ跟踪期望轨迹是具有挑战性的,也是本文所要解决的问题。
2 控制器设计
2.1 间接型自适应模糊控制
考虑如下形式的n阶非线性系统:
y=x
(12)


选择合适的K=(kn,kn-1,,k1)T,能够使多项式h(s)=sn+k1s(n-1)++kn的所有根都位于复平面的左半面上。如果函数f和g是已知的,令控制律为:
(13)
将式(13)代入式(12)得到闭环控制系统的方程为:
e(n)+k1e(n-1)++kne=0
(14)

2.2 基于输入输出线性化的模型变换
为了不失一般性,将植保机钟摆式喷杆主动悬架系统的状态空间模型(11)进行输入输出线性化变换。输入输出线性化变换的基本思路就是对一个可控n阶系统的输出y反复求导,直到y的r阶(r≤n)导数与输入u之间能够建立直接联系,此时称这个系统的相对阶数为r。
根据式(11),对植保机钟摆式喷杆主动悬架系统的输出y逐次求导:
y=x1
(15)
进而有:
(16)
由式(15)、(16)可以看出,植保机钟摆式喷杆主动悬架系统的相对阶数r=n= 3,系统无内动态。将式(16)写成如下形式:
y(3)=f(x)+g(x)u,x=(x1,x2,x3)T
(17)
(18)
(19)
2.3 模糊控制器的设计
(20)


其中:li=1,2,,pi(i=1,2,3)。
选用单值模糊器,应用乘积推理公式以及中心平均解模糊公式,则模糊逻辑系统的输出为:
(21)
(22)

(23)
(24)
2.4 稳定性分析及自适应律设计
将反馈控制律(20)代入式(17),得到钟摆式主动悬架模糊控制系统的闭环动态表达式如下:
(25)
令:
(26)
则式(25)以向量形式可表达为:
(27)
定义最优参数为:
(28)

(29)
将式(29)代入式(27)中,得:
(30)
把式(22)和(24)代入式(30)中,得到闭环动态方程为:
(31)

V=V1+V2+V3=
(32)
其中:γ1与γ2均为正常数,P是正定矩阵并满足Lyapunov方程:
ΛTP+PΛ=-Q
(33)

(34)

(35)


图3 喷杆倾角控制系统结构图
3 仿真分析
3.1 系统模型及控制器参数
对于钟摆式喷杆主动悬架,其相关参数如表1所示。

表1 钟摆式喷杆主动悬架系统参数
(36)
其中:j=1,2,,5,i=1,2;
选择x3的各隶属函数如下:
(37)
(38)
(39)
则用于逼近f(x)和g(x)的模糊规则各有75条。ψf和ψg中各个元素的初值分别取0和0.1,采用控制律式(20),自适应律采用式(35),取Q为三阶单位矩阵,k1=6,k2=10,k3=6。取自适应参数γ1=0.1,γ2=0.2。
3.2 仿真分析
使用Matlab/Simulink搭建控制系统仿真模型,验证所设计控制器的有效性。


图4 喷杆镇定仿真结果图1

图5 喷杆镇定仿真结果图2
从图4、图5可以看出,所设计的控制器可以短时间内使喷杆镇定,当喷杆的初始旋转方向与镇定方向相同时,控制器可以在4 s内使喷杆达到满意的镇定效果,当喷杆的初始旋转方向与镇定方向相反时,控制器可以在5 s内使喷杆镇定,这反映了实际喷杆倾角跟踪的效果也与当前系统的状态有关。


图6 喷杆倾角正弦函数跟踪结果图
由图6可以看出,在控制器作用下,喷杆倾角跟踪呈正弦规律变化的地面坡角效果良好。
假设在植保机稳定运行至第10 s时,液压系统出现漏油情况,从而影响液压缸对喷杆的作用力,导致系统模型中的F发生变化。
考虑液压系统漏油情况,为验证控制器的自适应性,再取期望轨迹ym= 0 rad,系统初始状态x0= [-0.2,0.1,0.1]T,仿真结果如图7所示。

图7 液压系统漏油情况下的喷杆镇定
由图7对照图4可以看出,在第10 s时由于系统模型的突然变化导致喷杆的镇定出现了些微的偏差,但通过控制器的快速响应,控制输入的迅速补偿,使喷杆经过重新调整后再次回到镇定状态并保持稳定。
考虑液压系统漏油情况,再取喷杆倾角的期望轨迹为ym= 0.2 sin(1.2t)(rad),系统的初始状态为x0= [0.2,0,-0.1]T时,对应的仿真结果如图8所示。

图8 液压系统漏油情况下的正弦轨迹跟踪
由图8对照图6可以看出,在第10 s时通过控制器的快速响应,系统模型的突然变化几乎没有给喷杆倾角的跟踪效果带来影响。
考虑实际中受到作物叶片遮挡等因素的影响,喷杆两侧的测距传感器不免产生测量误差,导致系统反馈的喷杆倾角与喷杆实际倾角具有一定偏差。为考查这种情况下控制器的控制效果,在仿真系统的喷杆倾角输出信号上加一个均值为0 rad,采样时间为0.1 s的高斯型白噪声干扰信号,来模拟实际中喷杆倾角存在测量误差的情况。
当白噪声信号的方差为0.001时,仿真结果如图9所示。

图9 方差为0.001的白噪声干扰下喷杆镇定仿真图
由图9(b)可以看出,在均值为0 rad,方差为0.001的白噪声干扰下,系统反馈的喷杆倾角值不断产生误差,误差最大达到0.09 rad (5.16°),但如图9(a)所示,喷杆的镇定虽然受到了测量白噪声干扰的影响,但喷杆镇定最大的偏离幅度只有0.006 7 rad (0.38°)。
扩大干扰白噪声信号的幅值波动幅度,取方差为0.005,仿真结果如图10所示,可以看出,喷杆倾角测量误差最大可达0.2 rad (11.5°),而喷杆镇定所表现的最大偏离幅度只有0.0147 rad (0.84°),可见系统具有很强的鲁棒性。

图10 方差为0.005的白噪声干扰下喷杆镇定仿真图
4 结束语
文中针对一种结构简单且应用广泛的植保机钟摆式喷杆主动悬架系统进行研究,建立了其状态空间模型,在此基础上设计了一种基于输入输出线性化的间接自适应模糊控制方法。通过仿真验证了在系统模型存在不确定性和参数时变性的情况下,所设计的间接自适应模糊控制器能够使钟摆式喷杆主动悬架系统具有良好的信号跟踪性能,并具备良好的控制精度、稳定性、自适应性以及鲁棒性,具有实际应用价值。
