不同水域船舶会遇危险评判阈值
2021-01-06陈传仁李国定李福生李丽娜陈国权
陈传仁, 李国定, 李福生, 李丽娜, 陈国权
(集美大学 航海学院, 福建 厦门 361021)
人工智能作为新一轮产业变革的核心驱动力,有助于推动科技的整体发展,随着航海仪器和航海相关智能感知设备等工具的开发与升级,保证船舶碰撞危险阈值的精确度和优化避碰模型势在必行。在船舶航行时设置的碰撞危险阈值有偏差会导致误报警时有发生,采取避碰措施也无法完全避免碰撞的发生。因此,优化船舶碰撞危险阈值的评判模型是当务之急,该模型可确保在不同水域下提供给不同类型的船舶准确的碰撞危险阈值,对获取船舶碰撞危险预警信息和开展避碰行动具有重要意义。
船舶碰撞危险度一直都是海上交通工程研究的重点之一,国内外对船舶碰撞危险度进行了广泛的研究。早期GOODWIN[1]、DAVIS等[2]和COLLEY等[3]分别提出船舶领域、动界和RDRR(Range to Domain/Range Rate)模型包括两船会遇时的最近会遇距离(Distance of Closest Point of Approach,dCPA)、两船到达最近会遇距离时间(Time to Closest Point of Approach,tCPA)、船舶领域(Domain)和动界(Arena)等避碰参数概念[4],这些概念的提出具有重要的理论与实际意义。近年来,CHIN等[5]建立一个有序概率单位回归模型,用于在港口水域航行过程中感知碰撞危险。SILVEIRA等[6]提出一种根据船舶先前的位置、航向和速度估计未来的距离,并将其与规定的碰撞直径相比较,通过评估碰撞候选数量计算碰撞危险的方法。SZLAPCZYNSKI等[7]提出基于领域的碰撞风险参数解析公式、领域违规度(Degree of Domain Violation,DDV)和领域间违规时间(Time to Domain Violation,TDV)。郑中义等[8]建立空间碰撞危险度、时间碰撞危险度和碰撞危险度模型,综合考虑碰撞的危险性和避碰的难易程度,但在船舶领域尚未考虑本船和目标船尺度的影响,且仅适用于开阔水域。王刚[9]利用扩展式博弈论执行船舶避让决策,在碰撞危险度方面利用模糊理论进行界定,实现在开阔水域内对两船对遇、交叉和追越的有效避让。苏鹏[10]采用几何分析方法确定船舶在不同位置的安全会遇距离(Safe Distance of Approach,SDA),求取船舶避碰时的最晚施舵时机,以评判船舶碰撞危险度。
综上所述:现有的船舶碰撞危险阈值精确性不足;目前有关船舶碰撞危险阈值的研究多集中在开阔水域和港口水域,已有的科研成果大多是在1种水域下研究船舶碰撞危险阈值。智能化是现代航海船舶发展的主要方向,而船舶智能化的核心目标之一是航行安全,但船舶通航环境的复杂性决定了某种水域下的单一的危险评判阈值不适用于现阶段的水路运输,不能保障航行安全也就更不适用于智能航海。因此,研究在不同水域条件下的船舶会遇局面的危险评判阈值对保证海上交通安全和船舶安全避碰具有重要意义。本文研究在不同水域各种会遇局面下的SDAc,提供与感知设备相匹配的足够精确的船舶碰撞危险评判阈值,为建立准确的船舶辅助避碰决策系统和实现船舶智能化航行奠定基础。
1 SDA边界模型相关概念
为保证船舶安全航行,能高效地实现能效智能管理,正确判断本船与他船是否存在碰撞危险,保证船舶碰撞危险评判阈值的准确性尤为重要。
船舶碰撞危险评判阈值通常指SDA[11],为更合理地划分船舶会遇时的危险度,根据COLREGs提出安全会遇距离的基本概念,结合解析几何理论分析,提出最大安全会遇距离SDAmax、临界安全会遇距离SDAc和安全会遇距离最小值SDAmin等3个判定危险度的重要概念。本文针对SDAc,应用调查问卷法,结合解析几何理论分析临界碰撞距离,以此研究确定船舶碰撞危险评判阈值。
1.1 SDA边界模型定义
在原有港口水域船舶危险判断阈值模型的基础上,将不同等级的阈值作为SDA的边界,通过构建SDA边界模型实现不同水域危险判断阈值的合理量化。SDA是模糊的概念,要实现船舶避碰预警,必须研究两船dCPA在什么范围内存在潜在碰撞危险。[12]SDA模型示意见图1,SDAc介于SDAmin与SDAmax之间,有
SDA⊇{SDAmin,SDAc,SDAmax}
(1)
式(1)中:SDAmin为以本船为中心,不考虑操纵余地,两船保速保向不致发生碰撞的安全会遇距离最小值,又称临界碰撞会遇距离;SDAc(SDAc=SDAmin+MSmin)是在SDAmin的基础上,加上避让时两船通过时边缘间的最小富余量MSmin,以SDAc作为两船是否存在潜在危险的重要判据之一,并作为SDA模糊边界{SDAc,SDAmax}的内边界;SDAmax为最大安全会遇距离,指本船在避让他船时,仍保留一定时间余量进行操纵避让,使两船能在SDAc外通过的距离。MSc为在SDAc的基础上一定时间的操纵余量。
一般危险情况下,以dCPA
图1 SDA模型示意
图2 SDA边界阈值模型示意
关于SDA边界阈值,与WOERNER等[13]有关最近会遇距离(Closest Point of Approach,CPA)范围的研究内容不谋而合,虽然双方关注的重点有所区别,但各自研究内容的具体细节基本一致。因此,如何精确量化危险评判阈值是研究的重点,更是实现船舶智能化的关键。
1.2 船舶临界碰撞会遇距离的计算模型
基于镇扬汽渡水域船舶碰撞危险智能预警模型的研究与实践,SDAmin是以本船雷达安装位置为中心,考虑两船的尺寸、会遇态势和船位误差形成的。SDAmin是不考虑“操纵余地”,两船保速保向能避免碰撞的最小会遇距离。将本船雷达安装位置点和目标船的雷达回波中心点视为计算船舶距离的参考点,根据船舶SDAc的定义,将本船与目标船正好能交会通过时A、B两点的距离作为船舶的SDAmin。以本船过目标船艉部的某种情况为例加以分析,本船与目标船的几何的关系见图3。
图3中:Ct为目标船艏向;Co为本船艏向;α为从本船艏向沿顺时针方向到目标船艏向的夹角,当Ct-Co>0时,α=Ct-Co,否则,α=Ct-Co+360°;Lt为目标船船长;Lo为本船雷达位置点到船头的距离;Bt为目标船船宽;Bo为本船船宽;A为本船雷达的安装位置点;B为目标船的中心点,AB即为所求的SDAmin,根据余弦定理可得
(2)
式(2)中:P为目标船定位精度。
2 问卷调查概况
2.1 问卷调查设计
本次问卷调查设计是以两船SDAc为研究主体,通过有关SDA的知识,结合相对运动几何分析方法确定的会遇特征,综合考虑船舶避碰的难易程度,确定此次问卷调查的具体项目。
2.1.1关于两船SDAc的调查问卷
该调查问卷在调查排除船速影响的情况下,本船与他船在不同会遇局面和不同航行水域过艏部或过艉部和过左侧或过右侧时的SDAc,见图4。
图3 本船过目标船艉部示例
图4 SDAc示意
2.1.1.1 水域特征划分和定义
水域特征指船舶航行水域属于开阔、繁忙或航道所属不同水域。本次问卷将航行水域划分为航道水域、繁忙水域和开阔水域等3种水域。鉴于航海上对该概念没有明确的定义,基于船舶拟人智能避碰决策(Personifying Intelligent Decision-making for Vessel Collision Avoidance,PIDVCA)方法自定义如下。
(1) 航道水域:指水域宽度受限致使船舶改变航向受到严重限制的自然航道或人工疏浚航道水域,由海图数据和航路信息提供的水域界限定义。
(2) 繁忙水域:指由于船舶交通流和(或)密度的影响致使船舶大幅度改向受到限制的水域。
(3) 开阔水域:指船舶大幅度改向(包括旋回)不受限制且不对他船形成碰撞危险的水域。
2.1.1.2 会遇局面的划分
(1) 目标船相对方位的划分。目标船相对方位的差别也会使两船避让决策方案发生变化,因此需对目标船的相对方位进行详细划分。考虑孙峰等[14]提出的典型船舶会遇态势关系区域图,以本船中心和本船真航向为参照建立坐标系,根据目标船的位置将其划分为a、b、c、d、e、f、g和h等8个区域(见图5)。
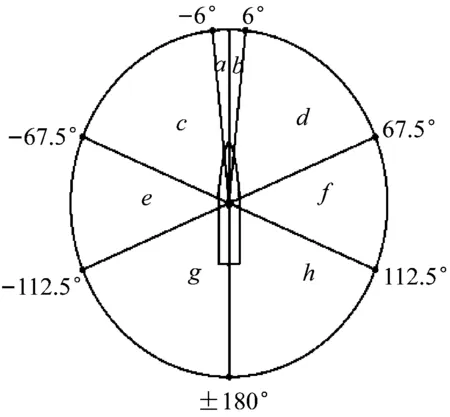
图5 目标船相对方位详细划分示意
图5中:a区域和b区域分别为左右舷对遇区域;c区域和d区域分别为左右舷前方交叉区域;e区域和f区域分别为左右舷正横附近交叉区域;g区域和h区域分别为左右舷后方追越区域。
(2) 会遇局面的确定。综合考虑本船和目标船的航速、航向和目标船的相对方位,依据COLREGs中船舶在互见中的行动规则确定22种典型的会遇局面,并对其进行编号,各会遇局面的编号代表相对应状态的编号,即编号1代表状态1,编号22代表状态22等,会遇局面划分见表1。
2.1.1.3 本船和目标船尺度的划分
此次问卷将100 m长的船舶作为船长L<150 m代表船型,200 m长的船舶作为船长150 m≤L<250 m代表船型,300 m长的船舶作为船长L≥250 m代表船型。
2.2 调查对象及回收情况
调查问卷采用纸质问卷的方式,针对具有丰富实船操控经验的船长、大副、二副和引航员等发放问卷150份,收回150份,其中有效问卷145份。
3 调查结果及分析
根据本船船长分为100 m、200 m和300 m等3类问卷,分别获得32份、70份和43份答卷。
3.1 数据处理
对不同会遇局面下,不同尺度的本船在不同水域中会遇不同尺度的他船,过其艏部、艉部、左侧和右侧时的SDAc进行问卷调查。
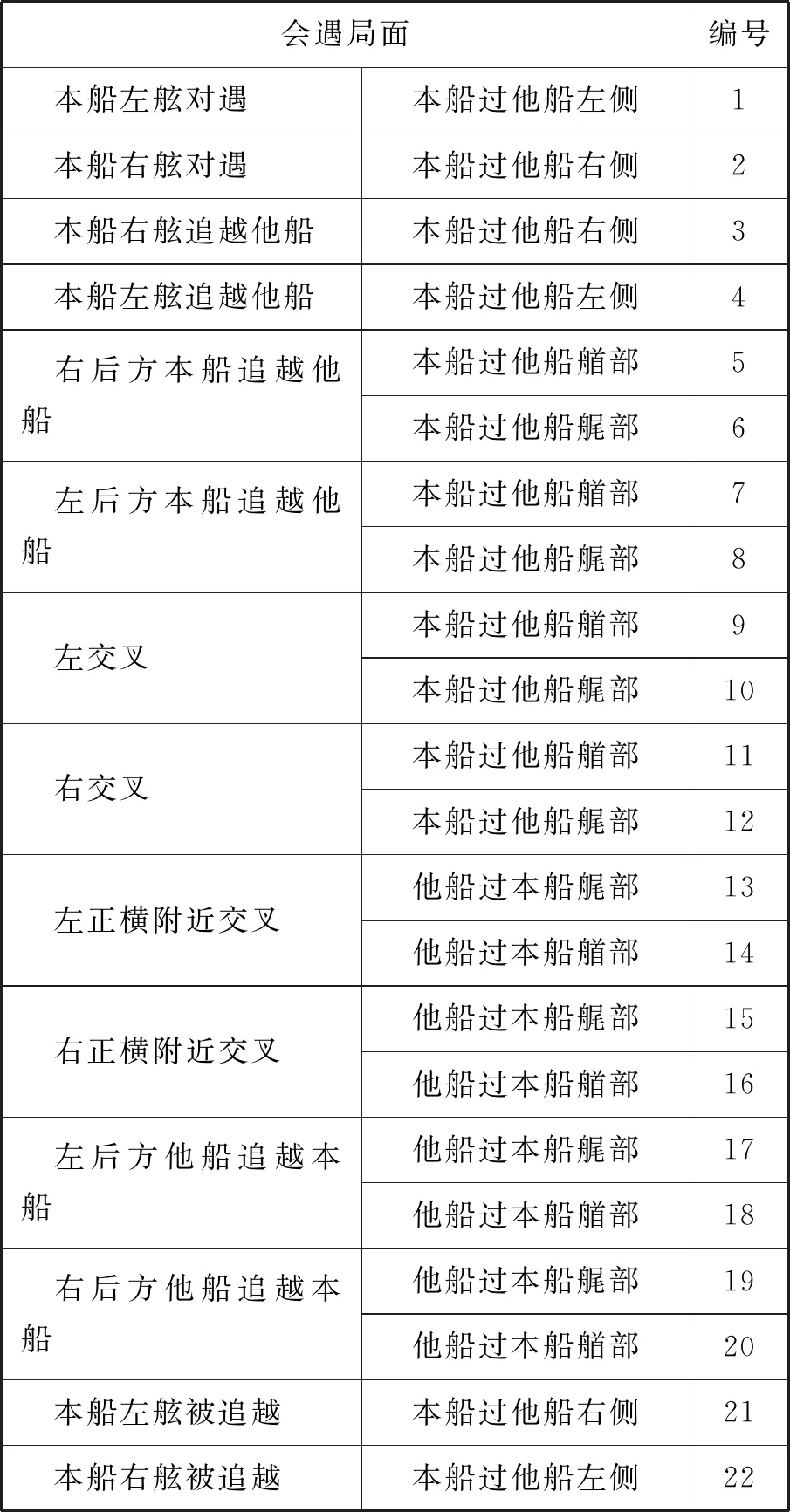
表1 会遇局面划分
调查问卷中数据处理部分采用数理统计的方法,利用数据的平均数、方差和中位数等统计量的计算,对问卷获得的样本数据进行研究,对样本数据中不合理的值用其他样本平均数进行插补。
3.2 结果分析
3.2.1SDAc结果分析
当在开阔水域条件下本船的尺度为100 m时,对应的不同他船尺度在不同会遇局面下的SDAc结果分析如下。
3.2.1.1 对遇局面
问卷中对遇局面分为本船左舷对遇和本船右舷对遇2种局面下本船过他船左(右)侧的2种状态,其SDAc示意见图6。由图6可知:本船左右舷对遇时,SDAc基本相同。
3.2.1.2 交叉局面
问卷中交叉局面详细划分为左交叉、右交叉、左正横附近交叉和右正横附近交叉等4种局面下本船过他船艏(艉)或他船过本船艏(艉)的8种状态,其中左右交叉局面下SDAc示意见图7。由图7可知:左右交叉时,SDAc呈现出本船过他船艏部会遇局面下略大于本船过他船艉部会遇局面下的规律,且左交叉局面略小于右交叉局面,符合互见中COLREGs第16条“让路船的行动”和第17条“直航船的行动”条款。左右正横附近交叉与左右交叉的规律大体相同,其SDAc关系为他船过本船艉部会遇局面略小于他船过本船艏部会遇局面,且左正横附近交叉局面略小于右正横附近交叉局面。
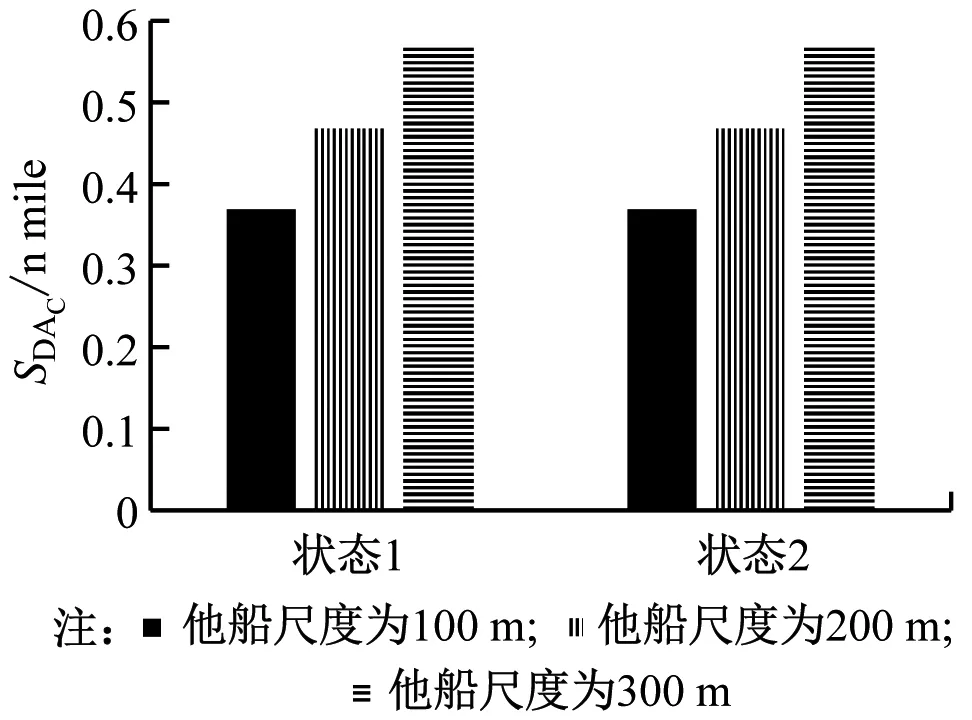
图6 对遇局面下SDAc示意
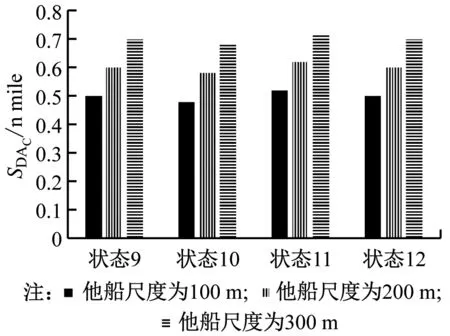
图7 左右交叉局面下SDAc示意
3.2.1.3 追越局面
问卷中追越局面详细划分为本船左(右)舷追越他船、本船左(右)舷被追越、左(右)后方他船追越本船和左(右)后方本船追越他船等8种局面下本船过他船左(右)侧、本船过他船艏部(艉部)或他船过本船艏部(艉部)等12种状态,其中左右舷追越和被追越局面下SDAc示意见图8。由图8可知:本船左右舷追越和被追越时,SDAc在本船过他船左(右)侧时基本相同,且在追越和被追越局面下也基本相同。左右后方被追越局面下SDAc示意见图9。
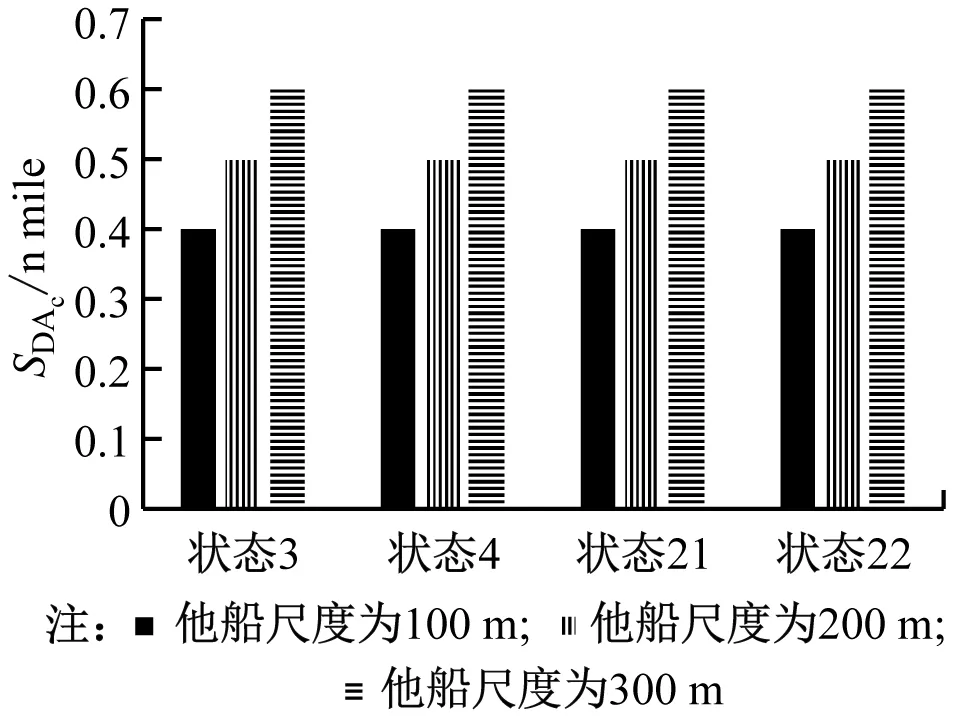
图8 左右舷追越和被追越局面下SDAc示意
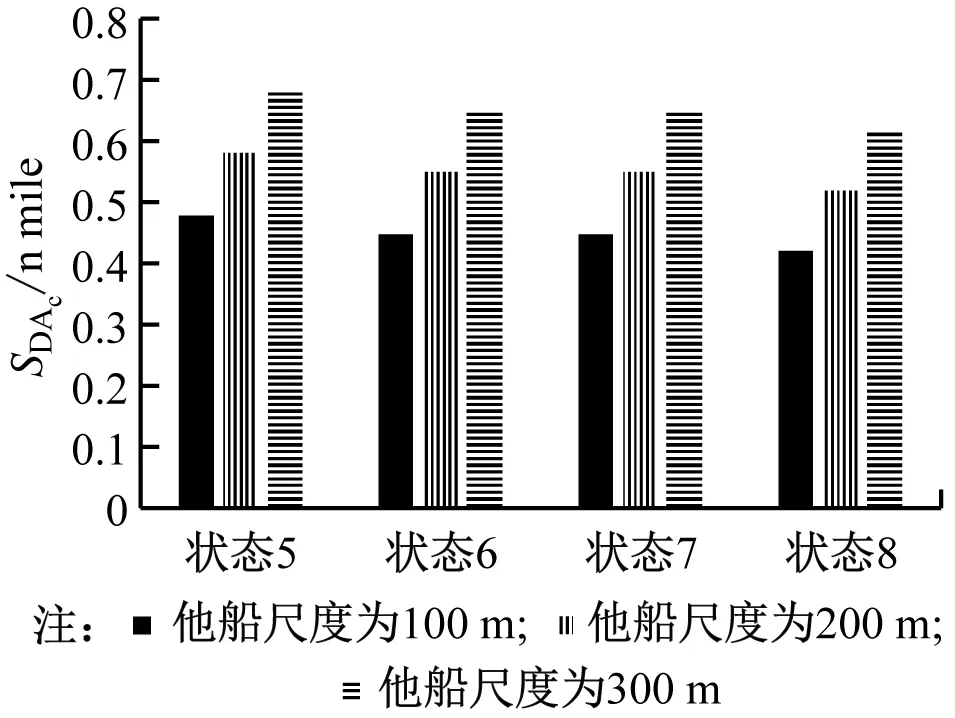
图9 左右后方被追越局面下SDAc示意
由图9可知:在本船左右后方被追越时,SDAc满足他船过本船艉部会遇局面略小于他船过本船艏部会遇局面,且左(右)后方他船追越本船时基本一致。本船左右后方追越时和本船左右后方被追越时也呈现相似的规律,其SDAc满足本船过他船艏部会遇局面略大于本船过他船艉部会遇局面,且左(右)后本船追越他船时也基本一致。
本船尺度和他船尺度均为100 m时,在相同会遇局面开阔水域和繁忙水域条件下的SDAc比较见图10。
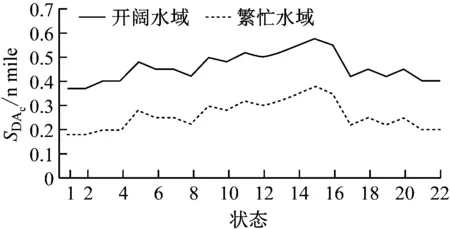
图10 SDAc比较图
由图10可知:在会遇局面下,当本船和他船尺度相同时,开阔水域条件下的SDAc大于繁忙水域条件下的SDAc。
结合所有数据的具体结果可知:在开阔水域、本船尺度为200 m和300 m的条件下,以及在繁忙水域条件下,对应的不同船舶尺度在不同会遇局面下的SDAc与在开阔水域条件下本船尺度为100 m时具有相似的规律;在航道水域条件下,SDAc与开阔水域和繁忙水域条件下的SDAc基本一致,唯一不同是在航道水域条件下无左右舷来船之分,其左舷来船和右舷来船的SDAc基本相同。综上所述,可得出以下结论:
(1) 在相同水域条件下,当本船和他船的尺度确定时,状态5~状态12中本船过他船艏部会遇局面下的SDAc略大于本船过他船艉部会遇局面下的SDAc。
(2) 在相同水域条件下,当本船和他船的尺度确定时,状态13~状态20中他船过本船艏部会遇局面下的SDAc略大于他船过本船艉部会遇局面下的SDAc。
(3) 在相同水域条件下,当本船和他船的尺度确定时,状态21、状态22和状态1~状态4中本船过他船左侧会遇局面下的SDAc与本船过他船右侧会遇局面下的SDAc基本相同。
(4) 在相同会遇局面下,当本船和他船的尺度确定时,开阔水域条件下的SDAc大于繁忙水域条件下的SDAc。
(5) 在开阔水域和繁忙水域条件下,当本船和他船的尺度确定时,在左舷来船局面下和右舷来船局面下(如左交叉和右交叉)略有不同,基本满足左舷来船时SDAc略小于右舷来船时SDAc。
(6) 在航道水域条件下,当本船和他船的尺度确定时,SDAc在左舷来船局面下和在右舷来船局面下基本相同。
3.2.2SDAc比较分析
根据问卷调查结果发现,对遇、交叉和追越等局面下的SDAc有一定的差异,彼此之间存在一定的隐性关系。
本文仅示例分析调查问卷中在开阔水域条件下本船尺度为100 m且他船尺度为100 m时各种会遇局面的SDAc。通过上述会遇局面的划分,对本船左舷来船和本船右舷来船进行分析,其中状态3~状态8因相对方位角不符而不参与分析。
将状态1、状态2和状态9~状态22的SDAc输入到MATLAB程序中,通过最小拟合的最小二乘法原理拟合数据,调查问卷中在开阔水域条件下本船和他船的尺度均为100 m时,各种会遇局面下的SDAc拟合示意见图11。
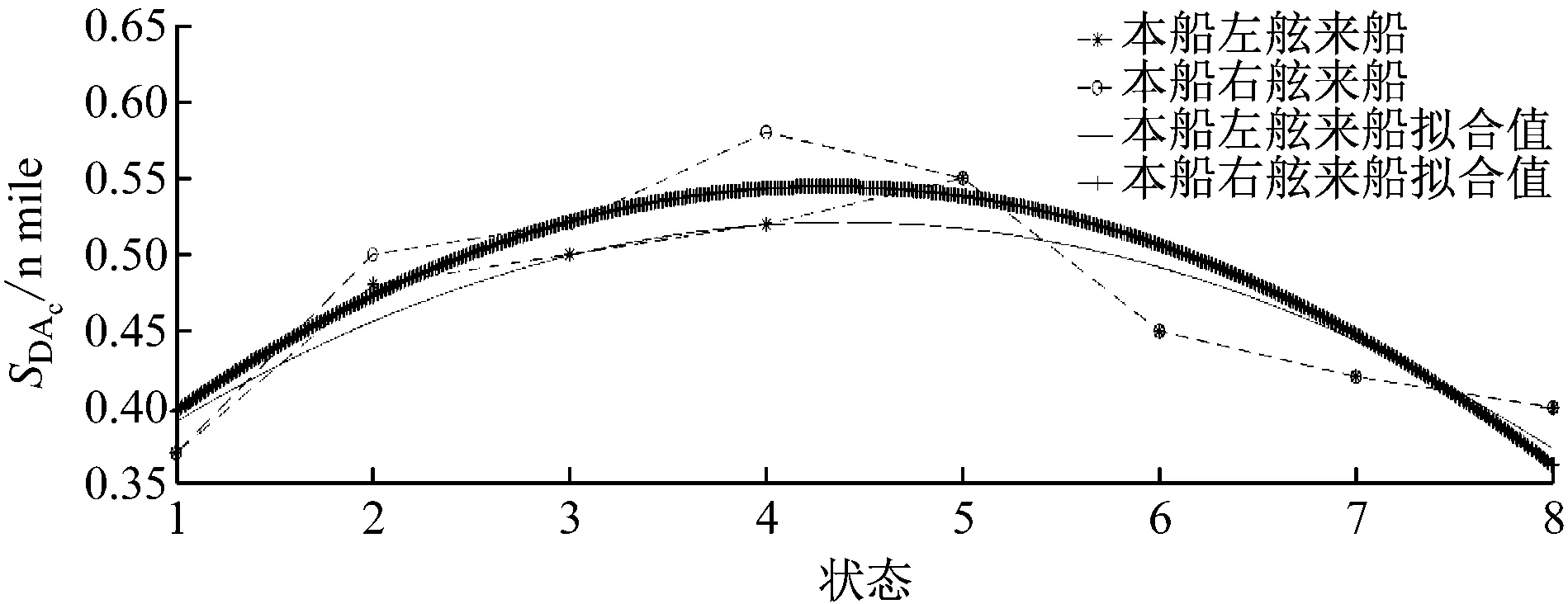
图11 SDAc拟合示意
由图11可知:本船左舷来船与本船右舷来船时的SDAc拟合曲线趋势相似且其SDAc拟合值较为接近。由于调查问卷中会遇局面划分较为详细,目前数据还无法确定各会遇局面的定性关系,因此仅将各会遇局面涵盖在COLREGs提出的对遇、交叉和追越等3种局面下分析,可知SDAc在交叉局面下最大,在追越局面下次之,在对遇局面下最小。本船右舷来船时SDAc在相对方位角为(0°,6°)时最小,在相对方位角为(6°,112.5°)时逐渐增大,在相对方位角为(112.5°,180°)时逐渐减小。本船左舷来船时SDAc与本船右舷来船时SDAc存在相同的规律,均为SDAc随着相对方位角的增大先逐渐增大再减小。
3.3 比例系数λMs的确定
对于海上交通安全而言,船舶在采取避碰行动的关键时期是分秒必争的,为方便驾驶员能在第一时间掌握各会遇局面下的SDAc,可通过引入比例系数λMs,根据各会遇局面下SDAc的大小关系,及时确定某会遇局面下的SDAc,保证驾驶员有足够的时间思考并及时采取正确的避碰措施。比例系数λMs确定的具体步骤如下:
1) 通过问卷获取不同会遇局面和不同船舶尺度过艏部或过艉部和过左侧或过右侧的SDAc。
2) 根据几何模型,计算不同会遇局面和不同船舶尺度下过艏部或艉部的SDAc。
3) 根据MSmin=SDAc-SDAmin,获得在不同会遇局面和不同船舶尺度下过艏部或艉部的MSmin。
将每种水域条件下本船尺度为100 m的船舶对应他船尺度为100 m、200 m和300 m类型的船舶得到的各会遇局面下的比例系数λMs记录在一个表格中,每个表格中包含66个系数。问卷中涉及3种水域条件、3种本船尺度,故可得到获取比例系数的9个表格。
3.4 问卷内容整理
由调查问卷调查的结果可知:本船追越他船局面下和他船追越本船局面下其SDAc基本一致,无左舷来船和右舷来船之分。因此,在后续的研究工作中,将现阶段调查问卷中有关会遇局面划分的内容进一步调整为:
1) (左右舷)追越和被追越改为本船追越他船、他船追越本船。
2) 左右后方被追越改为后方他船追越本船。
3) 左右后方追越改为后方本船追越他船。
综合考虑本船、目标船的航速、航向和目标船的相对方位,最终确定16种会遇局面。通过问卷结果对会遇局面相关内容进行调整,可为后续课题研究减轻负担,是研究过程中查漏补缺的关键环节。
4 结束语
本文基于调查问卷研究初步获得在不同水域、不同会遇局面下不同船舶尺度的SDAc,了解到各会遇局面下SDAc的潜在关系。同时,记录船讯网上船舶航行时的各项航行数据,获得与调查问卷中各会遇局面相匹配的实测数据。通过二者对比发现:调查问卷中航道水域、繁忙水域和开阔水域条件下各会遇局面的SDAc与实测值均存在不同程度的误差,且其结果总体偏大,有待借助数据挖掘等方法,结合实测数据对问卷结果进行修改。
尽管问卷调查是针对互见情况进行的,目前由于船舶感知设备尚不具备对COLREGs第18条船舶之间的责任条款中权利船舶进行识别的功能,故未设计该情况下的项目调查,但若能获得该条款下的权利船舶特征,诸如船舶自动识别系统(Automatic Identification System,AIS)信息,依然可采用该问卷调查值,或根据权利船的特殊情况(如考虑操限船作业水域等),通过调整危险评判阈值调整系数(互见中机动船阈值调整系数为1)实现。对于COLREGs第19条在能见度不良情况下的危险评判阈值,在模型中可根据能见度仪信息自动调整系数,以满足安全要求。通过理论与实践相结合完善并精确各会遇局面下的SDAc,建立不同水域船舶会遇危险评判阈值系统,仍需进一步研究。保证危险评判阈值系统的正确性能提高预警率,为建立准确的船舶避碰辅助决策奠定基础,提高船舶避碰的有效性,同时在自动避碰方面为实现船舶智能航海提供技术保障。
