客车防侧翻控制研究
2021-01-04李胜超杨方媛
□ 李胜超 □ 杨方媛
重庆交通大学 机电与车辆工程学院 重庆 400074
1 研究背景
近年来,我国交通运输行业发展快速,商用车市场随之出现普遍繁荣的景象。无论是载客还是货物运输,汽车都起着不可取代的作用。专家预测,我国将成为全球最大的汽车交易市场,仅商用车就占据汽车产销市场的50%以上份额[1]。近年来,汽车在运输过程中事故发生率有明显提高,对人们的生命财产安全产生危害。由美国国家公路交通安全管理局的调查统计数据可知,汽车侧翻事故的发生数量仅次于汽车碰撞事故,处于第二位,如图1所示。在汽车侧翻时,驾驶员往往来不及采取有效应对措施,从而造成严重事故[2-4]。因此,为保证更多出行人员的安全,需要对客车防侧翻控制进行研究,这一点显得尤为重要。
侧翻指汽车在行驶过程中绕纵轴线转动90°或更大角度,导致车身与地面相接触的一种危险侧向运动[5]。导致汽车侧翻的原因有多种,总体而言可以分为两大类,一类是非绊倒型侧翻,另一类是绊倒型侧翻。非绊倒型侧翻指由于汽车曲线运动而引起的侧翻。汽车在道路上,尤其是在坡道上转弯行驶时,过大的侧向加速度使左右驱动车轮间的垂直载荷产生位移,导致侧翻。绊倒型侧翻指汽车在行驶时,与路面上障碍物发生碰撞产生的侧翻。笔者提出的客车防侧翻控制策略主要针对非绊倒型侧翻。
2 客车防侧翻控制现状
目前,国外正在研究的客车防侧翻控制技术主要有三方面。第一,防侧翻预警系统,以车辆侧翻角或侧翻加速度为监测指标,检测下一段时间内是否有侧翻倾向,并及时报警。第二,差动制动法,通过对车辆不同的车轮施加不同的制动力,产生相应的横摆力矩,从而达到减小车辆侧向加速度的目的。第三,主动悬架技术,在防抱死制动的基础上,通过调整左右悬架的行程来实现控制。
1990年,woodrooffe和Thomas等人设计了一种防侧翻预警装置,通过测量内侧车轮的侧向加速度,并与进行正常值比较,实现报警[6];CHEN Bochiuan等[7]对基于侧翻时间的防侧翻预警进行研究,根据动力学方程计算侧翻时间预测矩阵,使矩阵能够准确地预测出车辆侧翻时刻。但这一预警方法以车辆侧倾角作为监测指标,存在一定的弊端,由于车辆侧倾角不同,因此无法应用到各种车辆上,通用性较差。朱天军[8]提出一种改进方案,采用车辆横向载荷转移率的改变来判断是否会发生侧翻。
国内的研究主要以主动悬架和差动制动为主。2003年,何峰等[9]采用差动制动技术进行控制仿真,结果表明差动制动技术在很大程度上减小了车辆的侧向加速度,可以起到防侧翻作用。2008年,宗长富等[10]对重型半挂车进行动力学建模,对其侧倾稳定性进行了研究分析。
笔者采用Trucksim软件,建立客车动力学模型。通过客车侧翻因素试验,分析明确客车侧翻诱发因素。选取横向载荷转移率作为客车侧翻评价指标,并采用比例积分微分控制,通过Matlab/Simulink软件仿真工具建立有效的防侧翻控制器模型。采用Trucksim软件与Matlab/Simulink软件进行联合仿真,在双移线试验工况下,证明所提出的防侧翻策略的可靠性。
3 客车侧翻因素分析
3.1 不同车速
在国内高速公路行驶标准的基础上,进行双移线工况试验。设置客车车速分别为80 km/h、90 km/h、100 km/h。
试验一对车速为80 km/h和90 km/h的客车进行行车对比试验,得到客车的侧向加速度曲线和侧偏角曲线,分别如图2、图3所示。
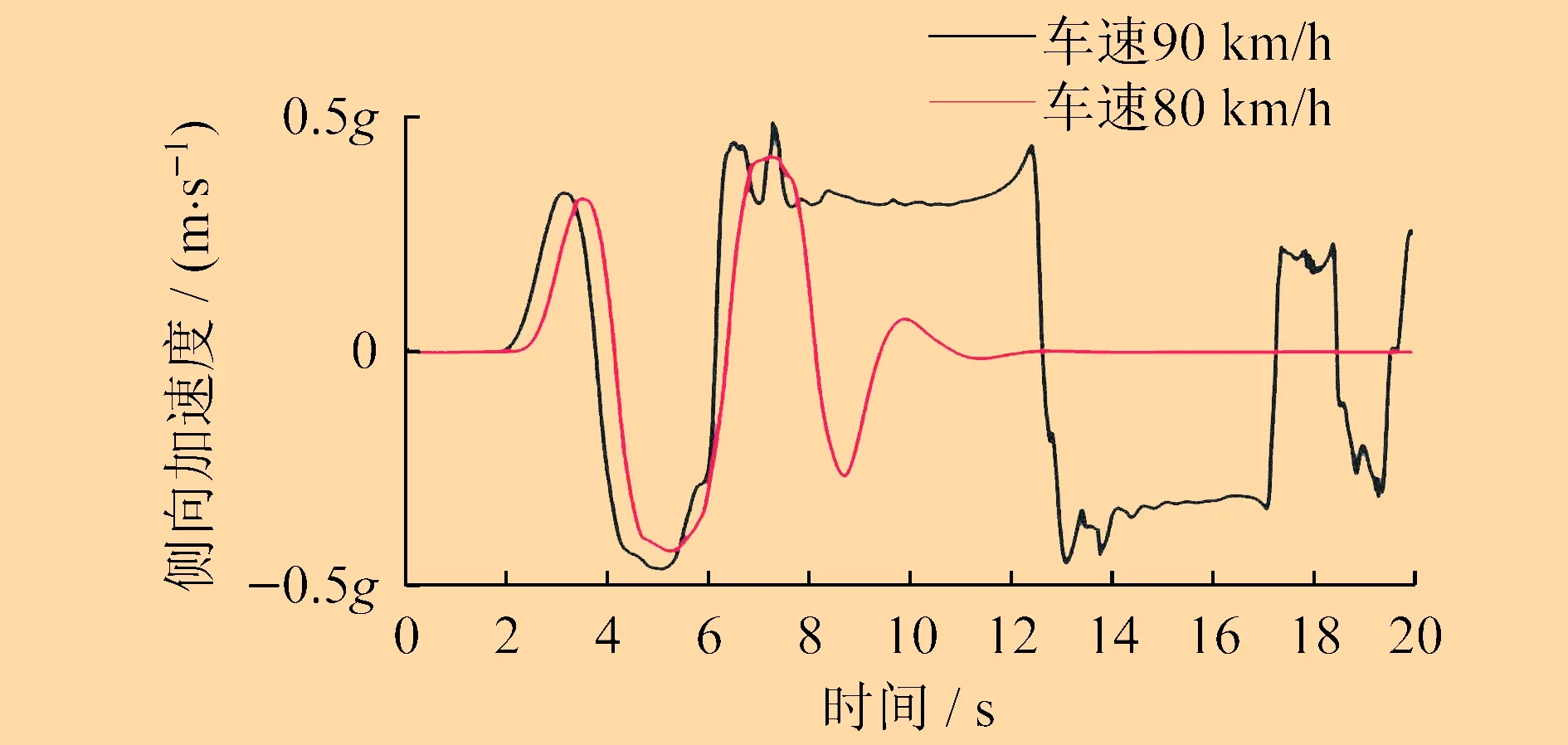
图2 试验一客车侧向加速度曲线
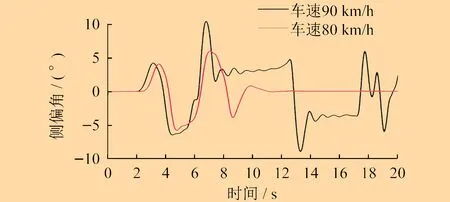
图3 试验一客车侧偏角曲线
试验二对车速为80 km/h与100 km/h的客车进行行车对比试验,得到客车的侧向加速度曲线和侧偏角曲线,分别如图4、图5所示。

图4 试验二客车侧向加速度曲线
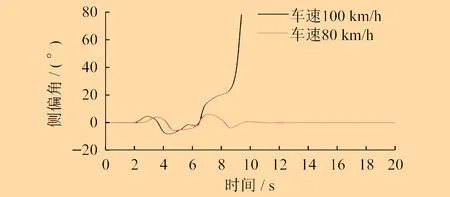
图5 试验二客车侧偏角曲线
对比以上两组试验结果,可以发现车速为80 km/h的客车在时间10 s以后侧向加速度与侧偏角均逐渐平缓,车速为90 km/h的客车在整个行车过程中侧向加速度与侧偏角的波动均较大,车速为100 km/h的客车约在时间9 s时侧向加速度消失,侧偏角骤增,代表发生了侧翻。
由试验可见,车速越快,越容易发生侧翻,车速是导致车辆侧翻的一个重要因素。
3.2 不同质心高度
车辆质心高度分别设置为1 600 mm、1 700 mm、1 800 mm。
试验三对质心高度为1 600 mm和1 700 mm的客车进行行车对比试验,得到客车的侧向加速度曲线和侧偏角曲线,分别如图6、图7所示。

图6 试验三客车侧向加速度曲线
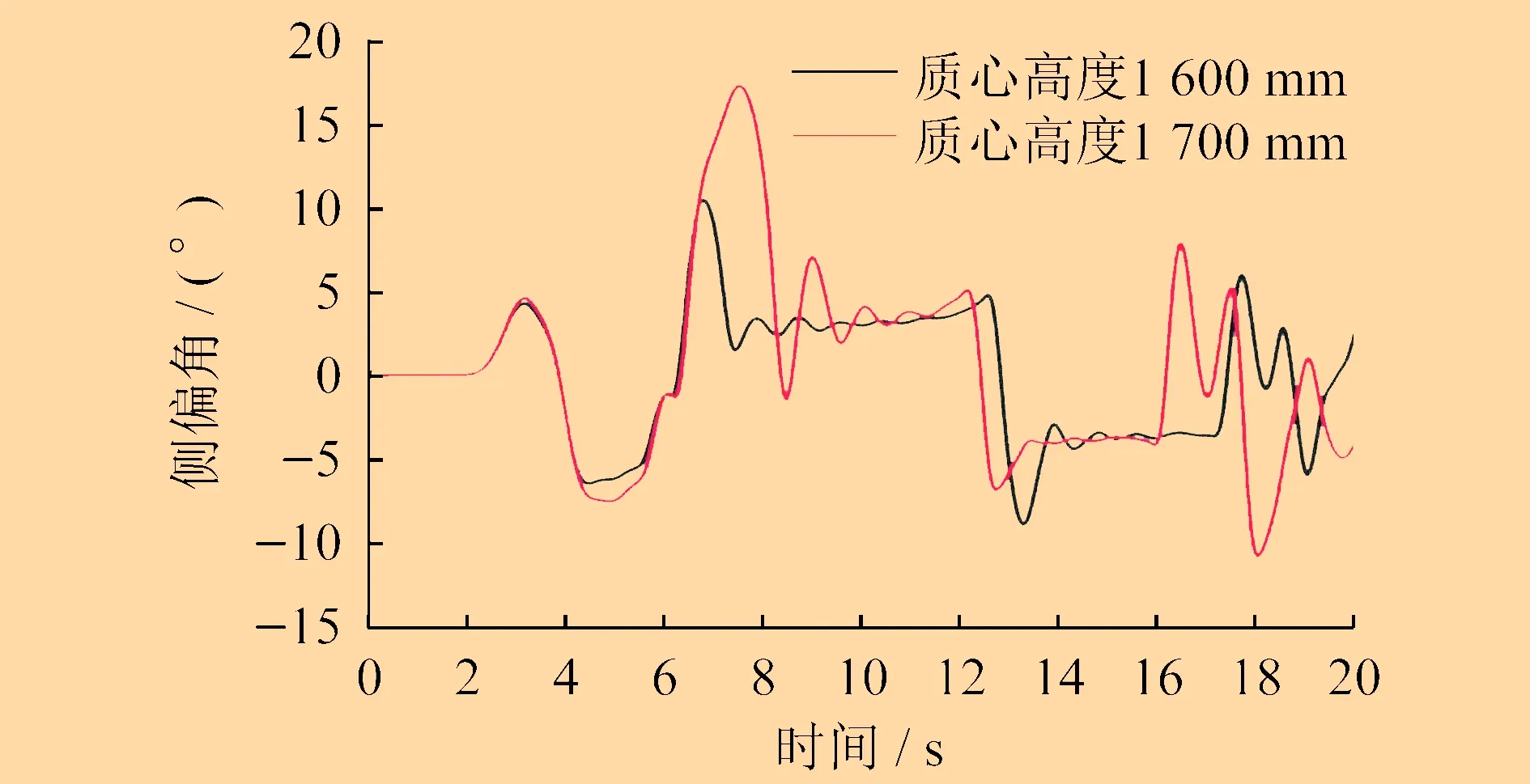
图7 试验三客车侧偏角曲线
试验四对质心高度为1 600 mm和1 800 mm的两客车进行行车对比试验,得到客车的侧向加速度曲线和侧偏角曲线,分别如图8、图9所示。
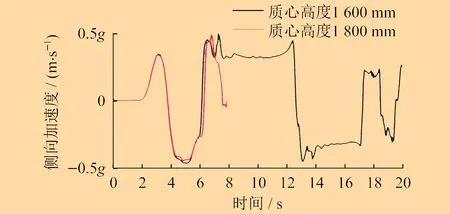
图8 试验四客车侧向加速度曲线
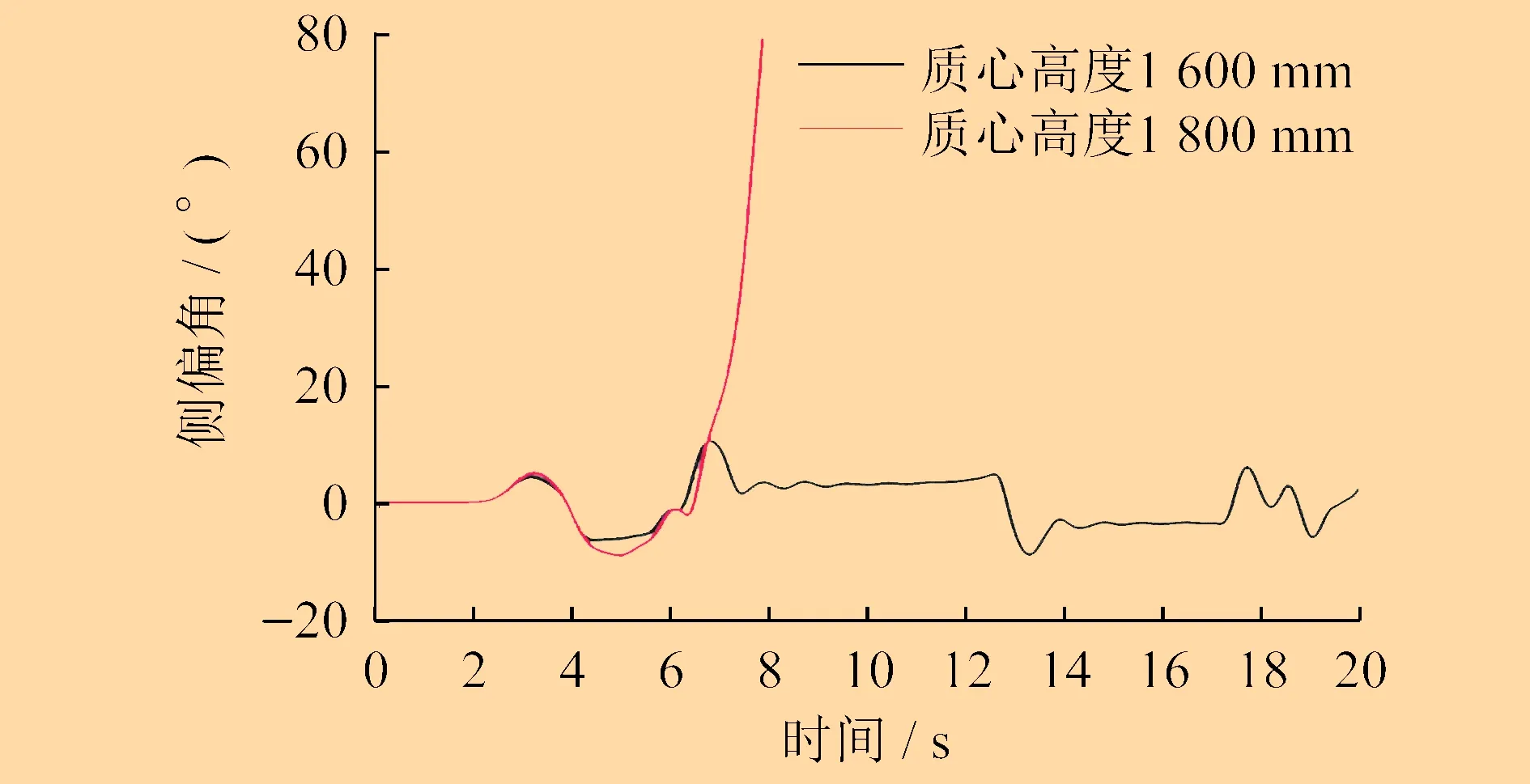
图9 试验四客车侧偏角曲线
对比以上两组试验结果,可以发现,虽然三种不同质心高度的客车在行车过程中均存在一定的不稳定性,但是不稳定性随着质心高度的增高而不断提高。质心高度为1 800 mm的客车,约在时间7.5 s时发生了侧翻。
由试验可见,质心高度越高,越容易发生侧翻,质心高度是导致车辆侧翻的一个重要因素。
4 客车防侧翻控制方法
为满足工业控制和操作简便的要求,笔者选择的控制方法为传统比例积分微分控制。根据所建系统中的误差,应用比例积分微分数学模型,进行比例、积分及微分运算,最终得到输出的控制量,即施加在客车前外轮上的制动压力。比例积分微分控制器结构如图10所示。
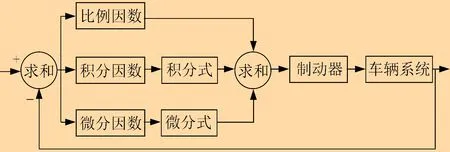
图10 比例积分微分控制器结构
比例控制的输出信号与输入信号的误差存在一定的比例关系,当系统仅仅受到比例控制时,输出存在稳态误差。
积分控制时,输入信号与输出信号的积分成正比关系。当引入积分项后,积分项随时间的推移而逐渐增大,所以系统存在稳态误差后,积分控制会使系统输出的施加在客车前外轮上的制动压力逐渐增大,最终会使稳态误差调节至零。
微分控制能够提高系统的动态响应性能,可以通过提前预测偏差,紧急抑制偏差的变化。
笔者采用差动制动技术,对客车左前轮或右前轮进行制动力输入,产生一个与转动方向相反的横摆力矩,从而防止客车侧翻。
5 客车防侧翻控制系统设计
对客车车轮横向载荷转移率进行监测,根据客车运行时的横摆角速度和侧向加速度来判断客车的转向状态。
横向载荷转移率L的计算式为:
(1)
式中:FLi、FRi分别为客车轴上左车轮、右车轮轮胎的垂直载荷;n为车轴数,n=2。
当客车运行中横向载荷转移率的绝对值大于1时,表明客车发生侧翻。应用此数据来监测客车是否会发生侧翻,具有良好的普遍性和实用性。
根据客车控制反应时间差,将横向载荷转移率的绝对值0.8作为触发阈值。一旦超过此阈值,触发器便触发控制器,对客车进行实时控制。
客车防侧翻控制系统如图11所示。对客车行驶过程进行实时监测,通过横向载荷转移率的绝对值来判断客车是否需要施加防侧翻控制。
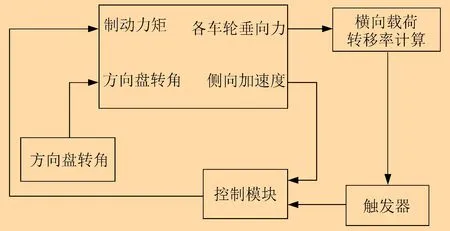
图11 客车防侧翻控制系统
6 客车防侧翻控制系统建模
6.1 横向载荷转移率计算模块
根据客车横向载荷转移率计算公式,在Matlab/Simulink软件中建立横向载荷转移率计算模块,如图12所示。
6.2 触发器控制模块
当客车横向载荷转移率绝对值大于0.8时,触发器开始起到触发作用。触发器控制模块如图13所示。
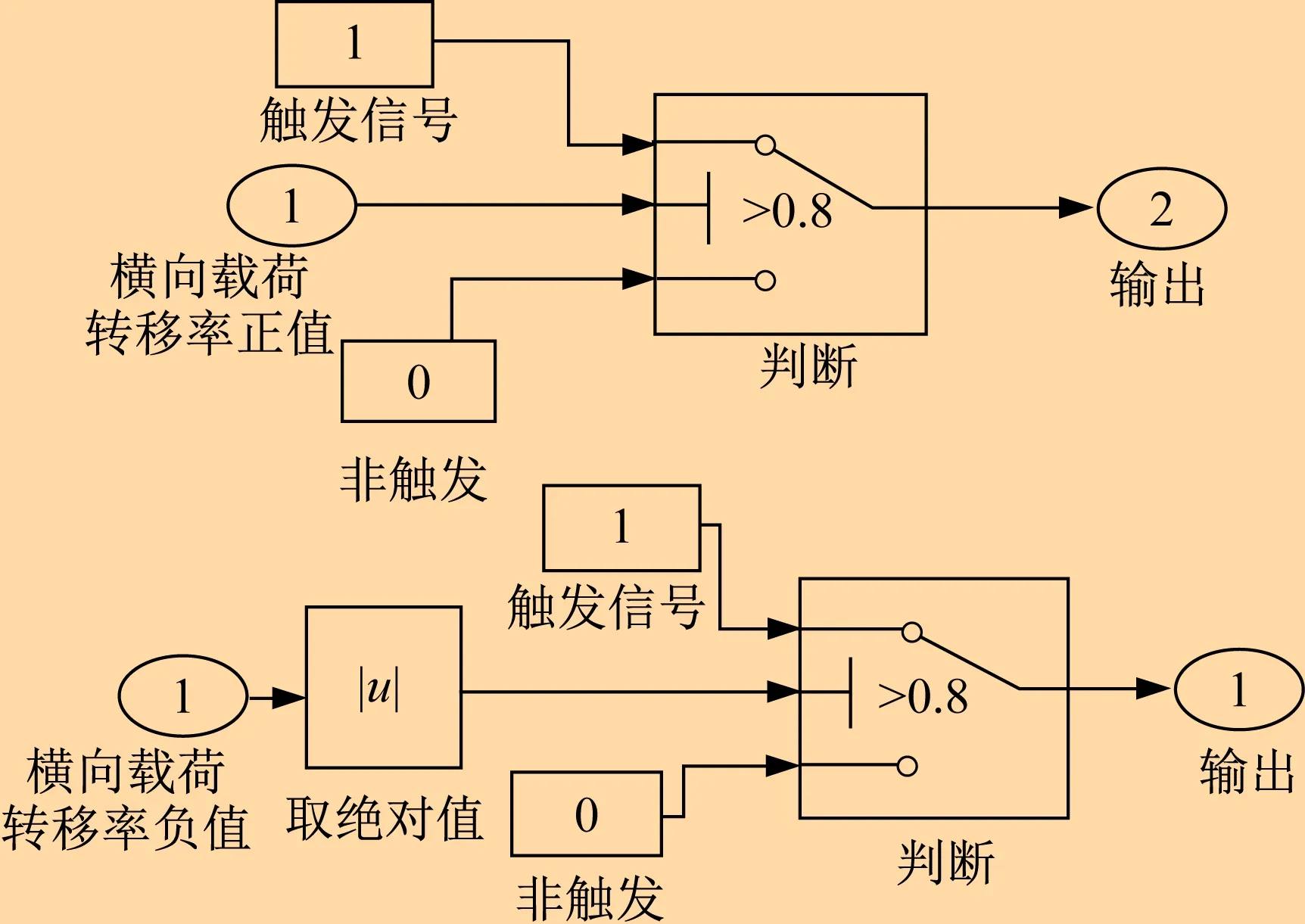
图13 触发器控制模块
6.3 比例积分微分控制模块
比例积分微分控制模块如图14所示,以客车侧向加速度实际值和参考值之间的差值作为反馈信号,系统输出的是施加在客车前外轮上的制动压力。客车侧向加速度的参考值为零。
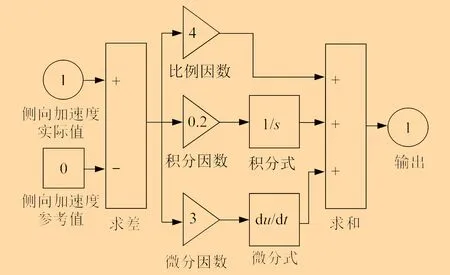
图14 比例积分微分控制模块
7 客车系统建模
Trucksim软件是一款参数化建模软件,在建模时需要的数据量非常大,数据的真实性越高,所建立的客车模型就越接近真实客车。客车整车模型示意图如图15所示。
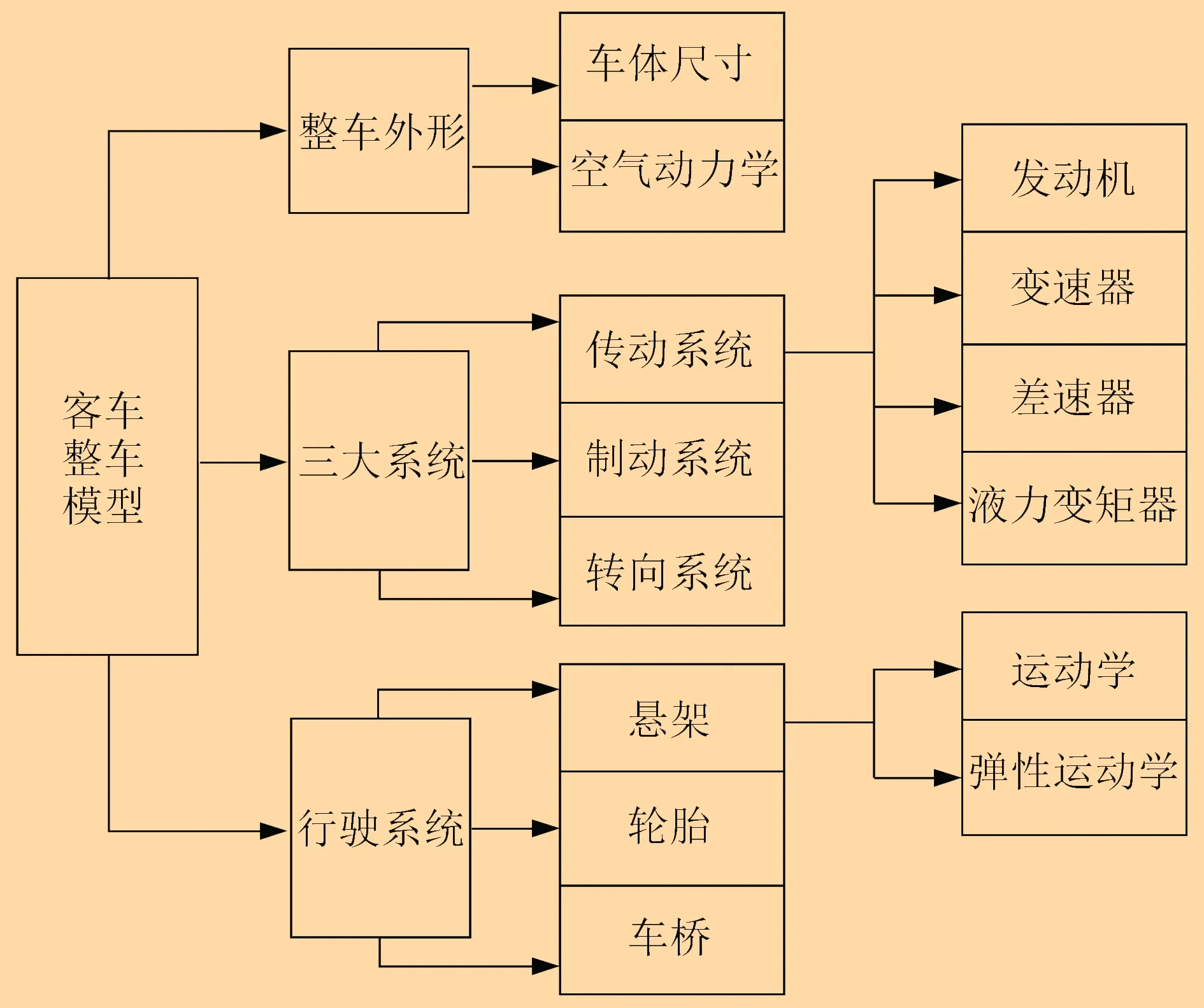
图15 客车整车模型示意图
笔者仿真试验所选用的客车车型为旅游观光车,客车整车参数见表1。
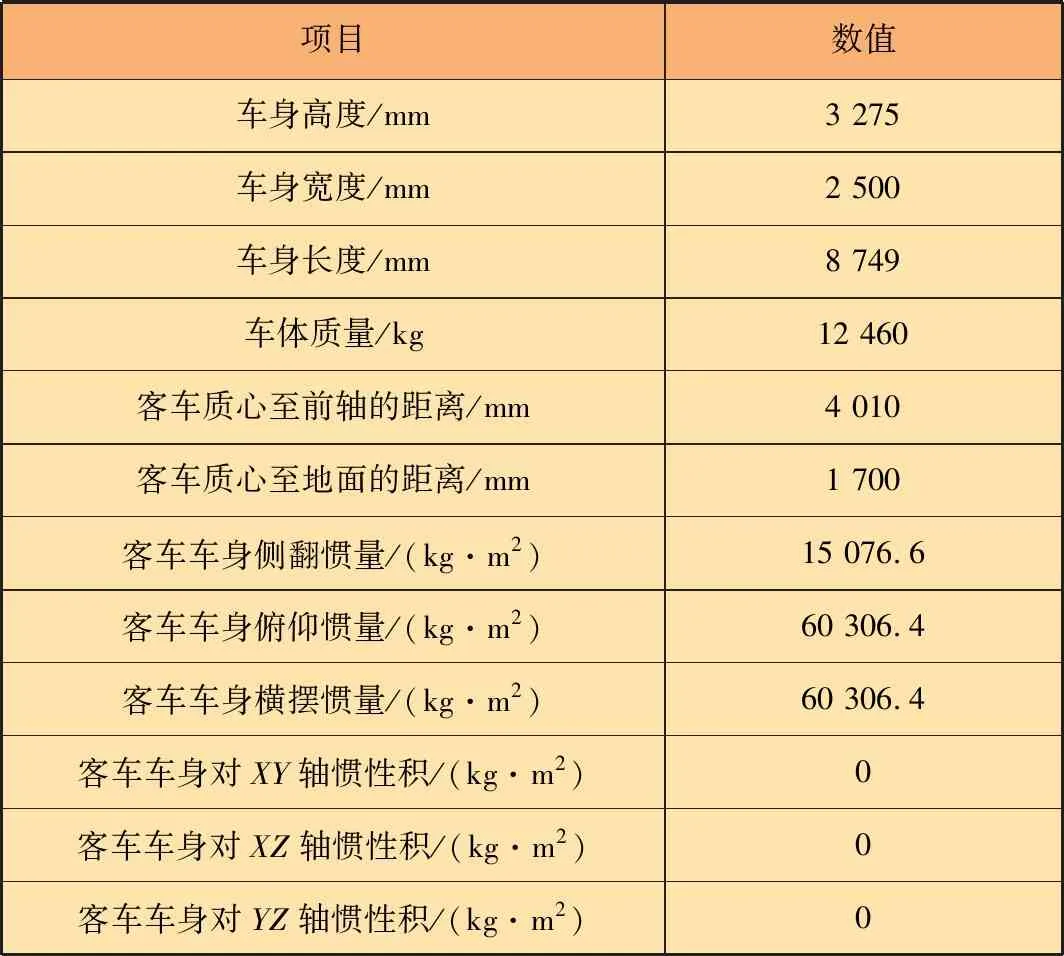
表1 客车整车参数
空气动力学参数见表2。客车在行驶过程中受到空气阻力的作用较大,空气动力学特性是影响客车性能的重要因素,可以解决客车动力性、安全性方面的诸多问题,并与客车造型技术相互依存[10]。
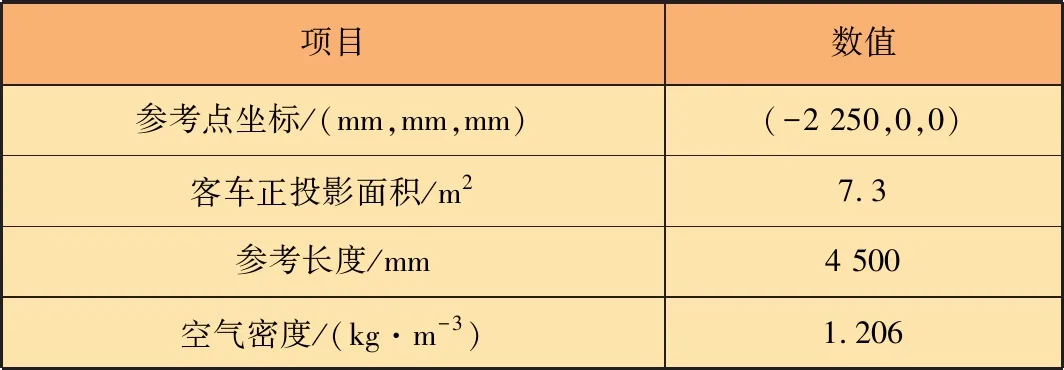
表2 空气动力学参数
客车传动系统的作用是将动力由发动机传输至驱动轮[11]。仿真试验中,客车所选用的发动机型号为潍柴WP6.220E50,适用于客车与卡车等车型,为增压中冷式,六缸直列型,排量为6.75 L,可输出功率为150 kW,额定转速为3 000 r/min,最大扭转转速为1 200~1 600 r/min,采用直列水冷四冲程湿式缸套。
客车转向系统的功能是使客车跟随驾驶员的意图进行行驶。客车转向系统主要包括转向操纵机
构、转向器、转向传动机构三部分[12-13]。
客车制动系统使行驶中的客车停止行驶,下坡时能够保持客车行驶稳定,并且使已经停止行驶的客车保持不动。
客车悬架及车轮系统参数见表3。悬架的主要作用是传递车轮与车架间的力和力矩,缓和冲击,衰减振动,保证车轮在任何工况下都有比较理想的行驶特性,使客车平顺行驶。按照左右两侧车轮是否采用一根整体刚性轴连接,悬架可以分为非独立悬架和独立悬架两种形式。仿真试验中客车前后轮都采用非独立悬架,轮胎选取9R22.5型真空轮胎。

表3 客车悬架与车轮系统参数
8 联合仿真
在Trucksim软件中输入两个变量,分别是客车左前轮制动力、客车右前轮制动力。
Trucksim软件的输出变量包括客车左前轮垂直载荷、客车左后轮垂直载荷、客车右前轮垂直载荷、客车右后轮垂直载荷、客车侧向加速度、客车质心侧偏角、客车横摆角速度。
将上述参数输入在Trucksim软件中建立的客车模型与在Simulink软件中建立的防侧翻控制系统模型,完成联合仿真系统模型的搭建。
按照国家动态模拟标准,对应用防侧翻控制系统的客车进行双移线试验,并与无防侧翻控制的同种客车进行对比分析。
对质心高度为1 800 mm、车速为100 km/h的客车进行双移线试验分析,在其它条件都相同的情况下,有防侧翻控制系统控制的客车没有发生侧翻,而没有防侧翻控制的客车发生了侧翻。仿真试验情况如图16所示。
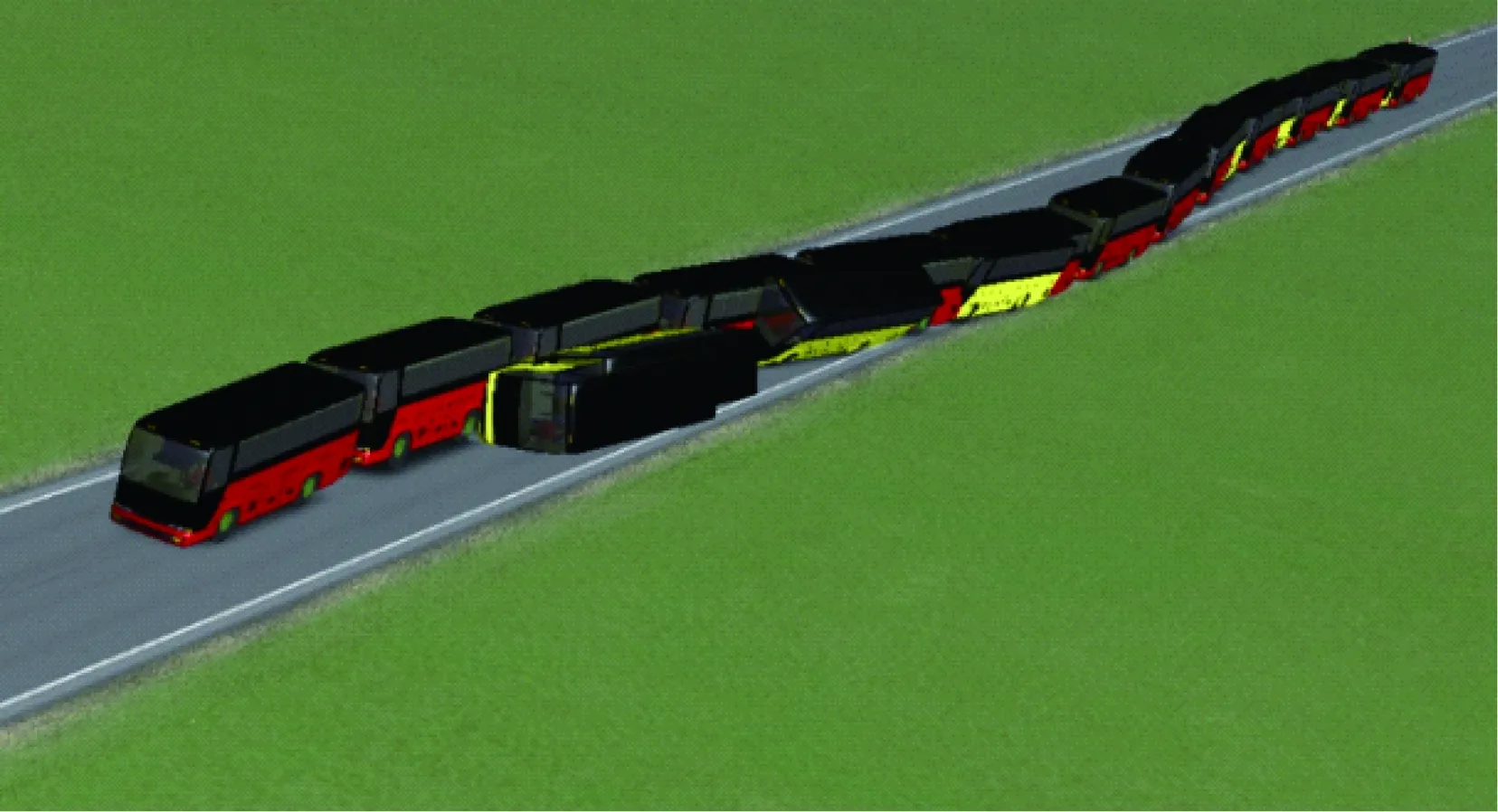
图16 仿真试验情况
联合仿真获得应用防侧翻控制系统的客车的横向载荷转移率、质心加速度、横摆角速度变化状态,依次如图17、图18、图19所示。
联合仿真试验是在质心高度、车速均为客车侧翻的极限状态值时进行的,由图17、图18、图19可知,在客车整个行车过程中,均未发生侧翻。虽然前1/3时刻客车载荷转移率、质心加速度、横摆角速度均有一定的波动,但是在防侧翻控制系统的调控下,这种波动逐渐平稳。
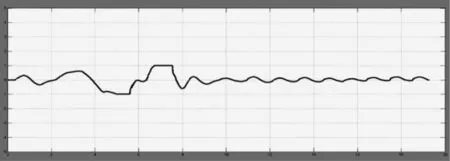
图17 客车横向载荷转移率变化
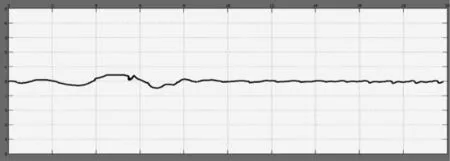
图18 客车质心加速度变化
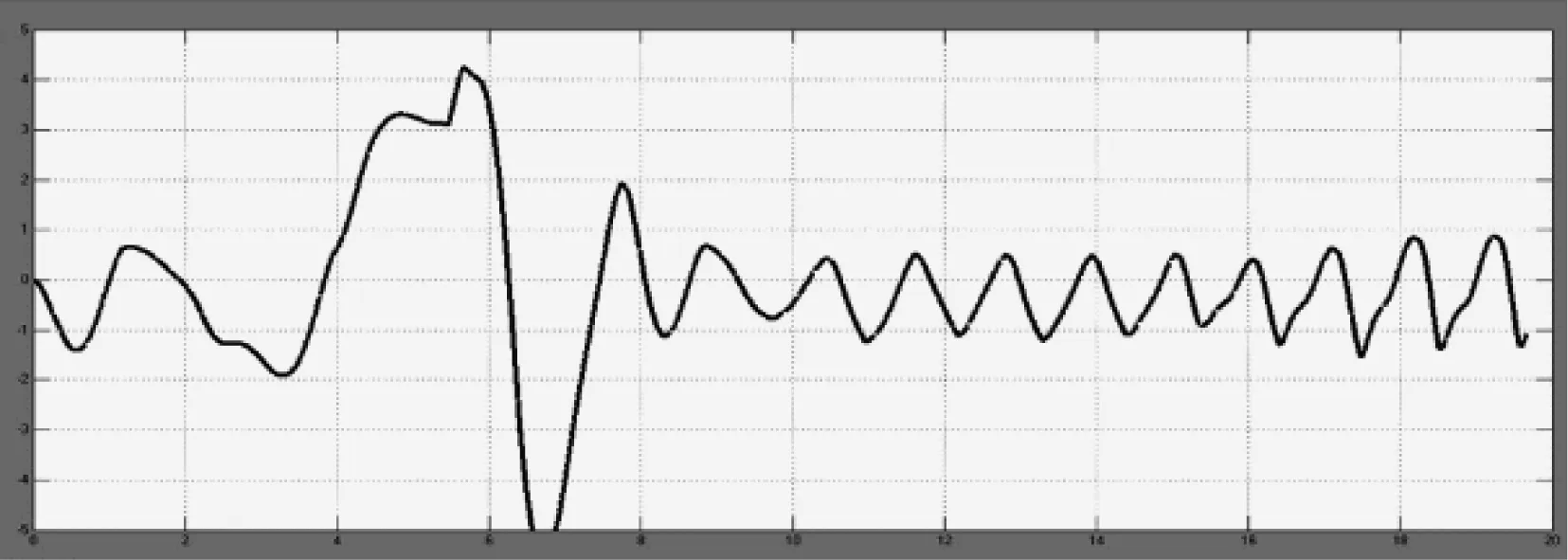
图19 客车横摆角速度变化
由仿真试验可见,这一防侧翻控制系统确实起到了良好的控制作用。
9 结束语
笔者以三自由度客车为研究对象,应用Trucksim软件建立客车模型,进行双移线试验与仿真分析,得出车速、质心高度都是引起客车侧翻的重要因素。为了更好地对客车行驶过程进行防侧翻控制,确保行驶的安全性,建立了基于比例积分微分控制的防侧翻控制系统。通过Trucksim软件与Simulink软件联合仿真,验证了防侧翻控制系统的有效性。
