应用于快速接地开关的电机操动机构设计*
2020-12-29庚振新李少华李得祥韩东鹏黄晓明
庚振新, 李少华, 李得祥, 韩东鹏, 黄晓明
(1. 沈阳工业大学 电气工程学院, 沈阳 110870; 2. 平高集团有限公司 技术中心, 河南 平顶山 467001; 3. 国网浙江省电力有限公司 电力科学研究院, 杭州 310014)
快速接地开关(FES)是一种用于控制和保护电路的开关设备,通常放置于气体绝缘金属封闭开关(GIS)中,密封在气体筒体内[1].操动机构可以实现开关分合闸操作,但是传统操动机构的运动部件较多,这对操动机构的可控制性和可靠运行产生了影响.为了提高操动机构控制的灵活性和简便性,选用电机操动机构作为快速接地开关的操动机构可以有效解决上述问题[2-3].
电机操动机构使用电机驱动触头做直线运动,可以根据快速接地开关的实际情况事先设定运动曲线,并采用电流传感器和位置传感器等检测电机的运行状态.该操动机构具有机械结构简单、控制性能优良等优点,可以提高快速接地开关操作的可靠性[4-5].
在快速接地开关进行分合闸过程中,电机在换相时会出现较大的转矩脉动现象,并且在分合闸操作完成后,由于动触头的运动速度较快,动触头与静触头接触时会产生机械碰撞,较大的机械碰撞力会使机械部件间发生较大的振动.为了改善快速接地开关分合闸操作中触头的震荡现象和电机转矩脉动现象,本文设计了一种新型的由无刷直流电机驱动的操动机构,并给出应用于快速接地开关的电机操动机构原理,利用SVPWM矢量控制方法驱动电机工作,完成无刷直流电机控制系统的硬件和软件程序设计,开关分合闸试验结果表明了新型电机操动机构应用于快速接地开关设计的合理性.
1 FES电机操动机构与控制系统
1.1 电机操动机构结构特点
电机操动机构由传动机构、驱动电机和电机控制系统组成,传动机构的主要结构包括拐臂、传动连杆和输出轴等,基本结构[6-7]如图1所示.驱动电机的转轴连接至传动连杆,传动连杆的两端分别连接至拐臂和输出轴,其工作原理是:控制系统控制电机绕组电流驱动电机工作,在电机和传动机构各个部件作用下,快速接地开关的输出轴旋转完成分合闸动作[8].在快速接地开关的分合闸过程中,操动机构的运动部件是电动机主轴、拐臂和传动连杆,这与传统的弹簧、永磁等操动机构相比,其机械结构简单,活动部件少,提高了操动机构的可靠性[9-10].
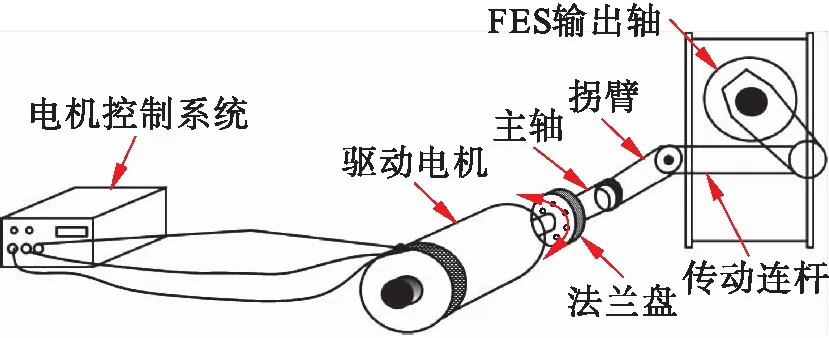
图1 FES电机操动机构的结构Fig.1 Structures of motor operating mechanism of FES
所讨论研究的快速接地开关的触头行程为(130±3) mm,开距为(80±3) mm,超程为(28±4) mm,将电机转动角度与快速接地开关的行程形成线性对应关系,能够得到任意时刻驱动电机的旋转角位移和输出轴的线性位移.在快速接地开关电机操动机构的机械结构中,电机和机械输出轴连接使快速接地开关的运动能量全部来自电机,在快速接地开关的分合闸过程中,快速接地开关中的驱动电机通过拐臂连接本体轴,电机转动角度是180°,本体转动轴是60°,分闸和合闸平均速度为2.0~3.0 m/s.
电机的工作过程分为加速、匀速和减速阶段,考虑到研究对象的实际情况,即电机控制器发出分合闸指令后,电机的启动时间很短,并且电机的大部分工作状态都是匀速,所以所检测的分合闸平均速度为快速接地开关匀速过程中的速度.快速接地开关的合闸操作行程曲线如图2所示.
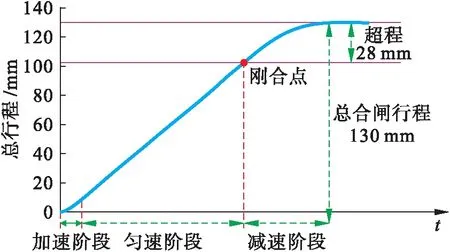
图2 快速接地开关的合闸操作行程曲线Fig.2 Closing operation curve of FES
1.2 无刷直流电动机的优点
无刷直流电机的主要结构有电机及其换相器,与三相异步电动机类似,定子绕组为三相星形结构,永磁体可以检测到转子极性.电机换向器由电力电子设备和信号处理电路组成,其主要功能是:接收电机的运动状态信号并控制电机的运动方向,改变逆变电路功率开关管的通断,产生PWM信号改变电机定子的电流导通相序,最终实现控制电机转速的目的[11].
无刷直流电动机的转子尺寸小、惯性低、转矩惯量比高,且永磁材料在无刷直流电机上的应用,使无刷直流电机不存在定子励磁电流分量,所以不需要考虑转子损耗.在功率容量相同的情况下,无刷直流电机对所需的功率变换器件的要求更低.
1.3 系统硬件设计
电机操动机构的控制系统包括中央处理单元、整流单元、电流检测电路、角位移检测电路、逆变单元、隔离驱动单元和电压检测单元.电机操动机构控制装置原理图如图3所示.
电机操动机构控制系统的原理是:整流单元将220 V的交流电转换为直流电,储能电容器充电至快速接地开关打开和闭合所需电压.在发出合闸操作命令后,中央处理器控制逆变器单元中开关的通断,改变驱动电机的导通顺序.在电机转动中,电流互感器采集逆变单元输出的电流信号,而角位移检测电路检测驱动电动机的角位移信号,然后传至中心处理单元,通过控制信号来改变电机电流导通顺序和运动速度.隔离驱动单元可以快速关断功率开关管,从而可以防止驱动组件在出现故障时被烧毁[12].

图3 电机操动机构的控制装置原理图Fig.3 Principle diagram of control device of motor operating mechanism
选择数字信号处理器DSP28335作为主控制芯片,处理来自信号采集单元的信号.驱动电机需要整流单元和逆变单元提供电源,无刷直流电机的每相均具有两相绕组导通,中心处理单元输出PWM信号,经隔离驱动单元控制功率开关管的通断,从而实现电机换相.
信号采集电路包括角位移测量电路和绕组电流检测电路,其中角位移测量电路采用光电编码器输出X、Y、Z信号,中央处理单元根据检测到的X、Y信号相位判断电机的转动方向,并根据Z相脉冲调整编码器的初始状态;绕组电流检测电路采用电流传感器检测驱动电机的三相绕组电流,将逆变单元传至驱动电机的电流按照一定比例输出到中心处理单元,作为电机换相的逻辑判据.
1.4 系统软件设计
电机操动机构控制系统的软件程序包括系统主程序、电容充电程序、信号采集程序、坐标变换程序、PI运算程序和矢量控制程序.系统主程序控制中央处理单元的各个程序,当中央处理器接收到开关的分合闸信号时,程序进入外部中断,然后根据电机操动机构的要求执行相应的子程序.
逆变单元控制功率开关管的通断,实现驱动电机的旋转;电容充电程序按照设定的电压值对电容进行充电;PI运算程序进行速度环、位移环和电流环的运算;信号采集程序检测电机绕组电流信号和转子角位移信号,光电编码器将检测得到的电压脉冲信号发送至中央处理单元,定位电机转子的位置;坐标变换程序为Clark变换和Park变换,程序对电机定子电流信号进行坐标变换.矢量控制程序根据坐标变换程序输出的两个电压矢量,运用SVPWM矢量控制策略输出PWM波形,控制电机工作[13-14].
控制系统的程序流程图如图4所示.系统先运行初始化程序,对储能电容充电,当接到分合闸指令后运行信号采集程序;反之,则继续等待.之后,运行坐标变换程序、PI运算程序和矢量控制程序对采集的信号进行调理变换,在开关完成分合闸操作后,系统结束运行.

图4 控制系统的流程图Fig.4 Flow chart of control system
2 矢量控制系统的仿真分析
根据快速接地开关的实际要求,搭建电机操动机构矢量控制系统的仿真模型.驱动电机的工作转动角为180°,即仿真模型中位移环的给定值为3.14 rad.在电机操动机构的实际工作过程中,当驱动电机转动3.14 rad时,快速接地开关动触头的行程为130 mm.驱动电机的技术参数如表1所示.
通过电机转动速度的变化可以直接表征电机运动过程的转矩变化,而且快速接地开关动触头运动能量直接由驱动电机提供.电机给定速度为146和220 rad/s时的速度曲线如图5、6所示.

表1 驱动电机的技术参数Tab.1 Technical parameters of drive motor
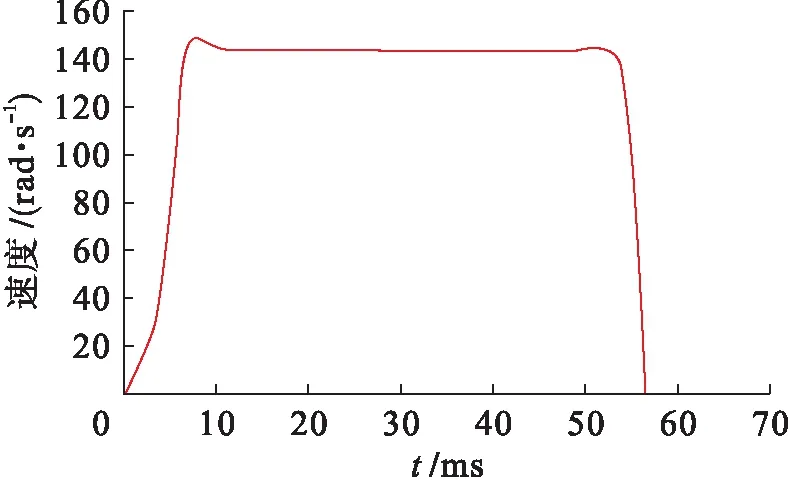
图5 电机给定速度为146 rad/s时的仿真结果Fig.5 Simulation results with motor given speed of 146 rad/s
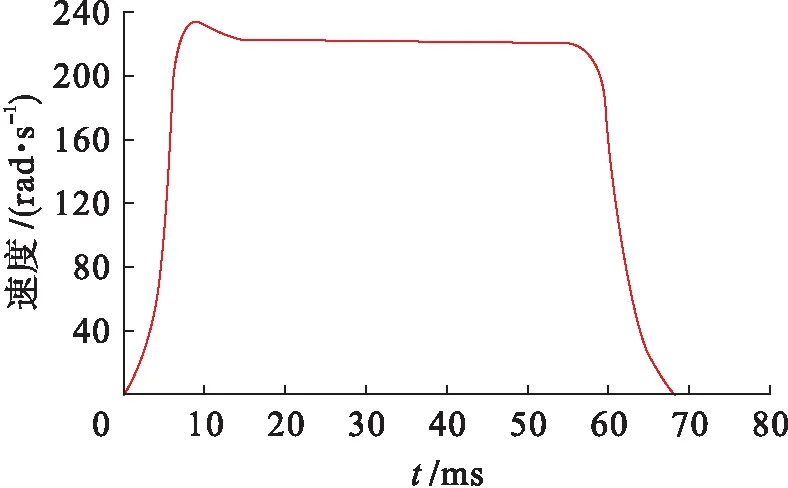
图6 电机给定速度为220 rad/s时的仿真结果Fig.6 Simulation results with motor given speed of 220 rad/s
图5中电机速度已经达到了设定的146 rad/s,折算到快速接地开关动触头的运动速度为2.0 m/s;图6中电机速度在匀速阶段达到设定的220 rad/s,折算到快速接地开关动触头的运动速度为3.0 m/s.由仿真结果可知,采用矢量控制策略的电机操动机构可以使快速接地开关动触头的速度保持在2.0~3.0 m/s之间,能够满足快速接地开关的分合闸要求.
3 电机操动机构特性试验
以快速接地开关电机操动机构为讨论对象,搭建应用于快速接地开关的电机操动机构试验平台,开展分合闸特性试验.电机操动机构试验平台的现场测试图如图7所示.快速接地开关进行分合闸操作的能量由驱动电机提供,驱动电机在带动传动机构和动触头运动的过程中受到机械冲击,电机转矩脉动现象可能比较严重,而通过矢量控制策略可以改善这种现象.通过角位移传感器和电流互感器测量得到快速接地开关合闸的转速和分闸绕组电流变化曲线如图8、9所示.
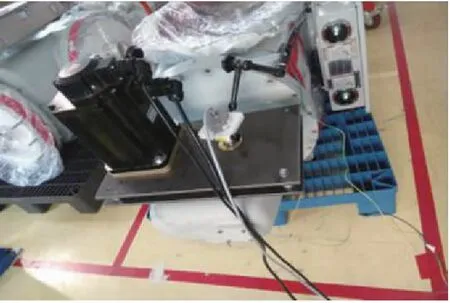
图7 电机操动机构试验平台的现场测试图Fig.7 Field test photo of experimental platform of motor operating mechanism
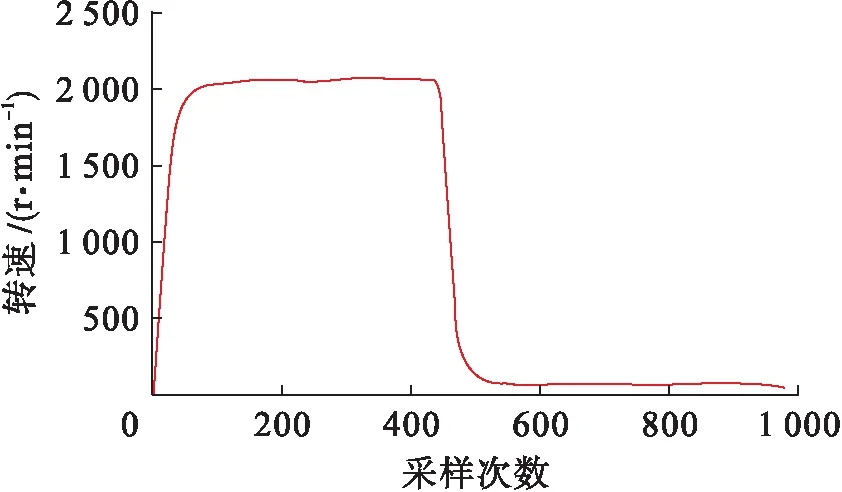
图8 快速接地开关合闸特性的电机转速曲线Fig.8 Motor speed curve of closing characteristics of FES
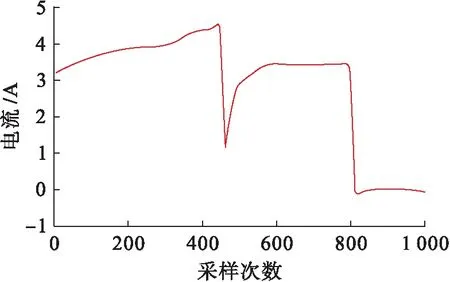
图9 快速接地开关分闸特性的电机绕组电流曲线Fig.9 Motor winding current curve of opening characteristics of FES
通过图8、9试验结果可知,电机运动过程较为平缓,电机转矩脉动现象得以改善;快速接地开关合闸时电机最大绕组电流为3.95 A,分闸时为4.51 A,电机工作时电机绕组发热现象不严重,可以确保开关正常工作.
4 结 论
本文以应用于快速接地开关的电机操动机构为讨论对象,分析了电机操动机构的工作原理和运动过程.设计研究电机操动机构的控制系统硬件电路和软件程序,采用SVPWM矢量控制策略,开展快速接地开关分合闸特性试验,使用机械特性仪获取机械特性曲线及其性能指标.采用矢量控制策略控制电机操动机构的运动过程,快速接地开关分合闸速度均满足要求,且匀速阶段速度变化平缓,电机转矩脉动现象大幅降低,过程震荡现象得到有效改善.
