智能矿用井下机器人巡检系统在曹家滩煤矿中的应用
2020-12-28白怡明
白怡明
(中国煤炭科工集团 沈阳设计研究院有限公司, 辽宁 沈阳 110015)
0 引言
曹家滩井田地界处在陕西省榆林市北部,设计生产能力为1 500万t/a,井下输煤系统由3条带式输送机组成,分别为大巷带式输送机、二煤带式输送机和工作面顺槽带式输送机。矿井井下倾角平缓,地质构造比较单一,容易开采。但传统带式输送机人工巡检存在以下劣势:
1) 输煤系统与环境监测、人员定位、设备管理、视频等系统相对独立,不能够实现跨系统的指挥与调度,指挥效率有很大的提升空间。
2) 管理人员不能及时掌握现场的环境条件和突发状况,发出的指令滞后,不能迅速得知故障原因。输煤系统沿线人工巡检有误报或漏报的现象发生。输煤系统距离长、环节多,当流程中的一个设备出现停机故障时,会对整个煤流系统造成停机的影响。
3) 外部环境复杂,井下大巷照度较低,煤尘较高,容易受到外来人员或重物的碰触,影响带式输送机的正常运行,从而发生重大安全事故。
4) 矿井组织人员按照计划对输煤系统进行定期点检与检修。由于没有很好地利用输煤系统的过程数据,所以不容易发现设备的轻微异常,无法进行预知维修。
近年来,井下矿用长距离带式输送机以其输送速度快、输送量大的特点,被大量用于煤炭输送工程。但井下带式输送机地处巷道环境,周围情况复杂,安全隐患大,一旦遭到破坏损失就较为严重。随着国家对智能化矿山的迫切需求,利用自动化的技术及装备建设智能化井下开采,已成为国内煤矿行业智能化建设的发展方向。曹家滩煤矿秉承“少人则安,无人则安”的安全管理理念,按照国家智能化、现代化煤矿的要求,设计了一套KRXJ38型智能矿用井下机器人巡检系统。
1 智能矿用井下机器人巡检系统介绍
KRXJ38型智能矿用井下机器人巡检系统是一套井下矿用带式输送机综合智能化巡检系统。它主要由3个子系统组成:托辊磨损实时监测子系统、沿线机器人报警子系统、主电动机轴承振动监测子系统。
为了保障井下带式输送机的安全生产和无故障运行[1],设计采用先进的智能化技术,通过异构数据采集网关,对影响输煤系统的数据进行特征抓取,并对抓取的数据进行融合与相性分析,最终把主煤流特征信息转化后进入规则库。此系统主要由机器人本体、基站、轨道和地面工作站组成。巡检机器人搭载多种传感器,实时采集现场的图像、声音、红外热像、温度及多种气体浓度等参数[2]。该系统协同监控带式输送机的整体工况和运行状态[3],分析主煤流系统的综合效率[4],并给出提效措施,可大大降低设备的故障率并减少人工成本,及时反映现场实际情况及设备运转状况,从而消除安全隐患[5],使输煤系统长期处于良好的连续运转状态,创造更大的经济效益[6]。带式输送机参数见表1。
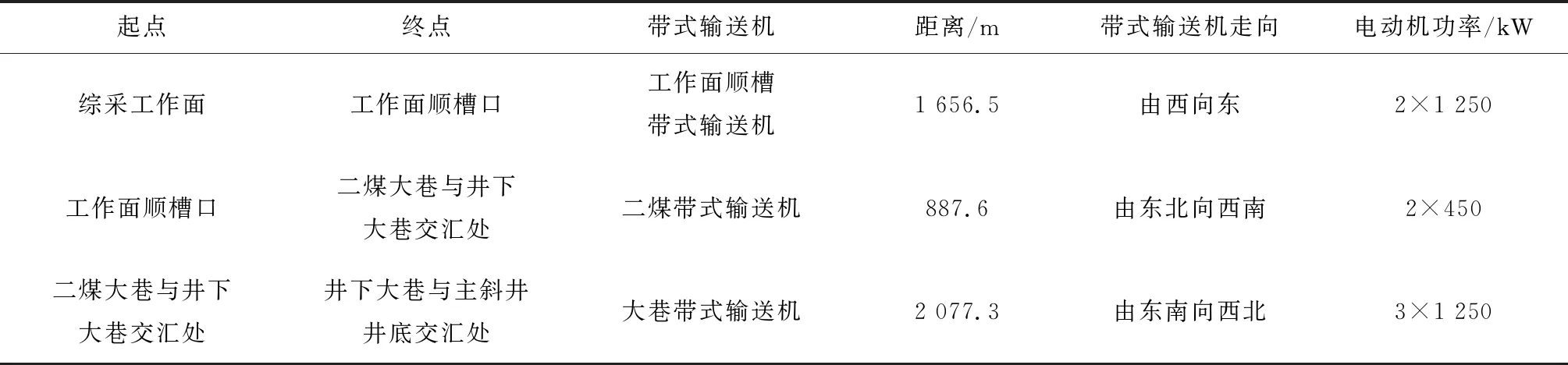
表1 曹家滩井下矿用带式输送机参数
2 智能矿用井下机器人巡检系统的关键技术
2.1 输煤系统托辊磨损实时监测子系统
该系统通过对托辊支架的振动监测和分析及对托辊磨损状况的判断,给出报警指示信号。整个系统由振动传感器、数据采集器、信号网络传输设备、上位机电脑等组成,可智能监测托辊突发故障及磨损状况,并给出指示信号。图1为托辊磨损实时监测子系统拟采用的架构图。
托辊磨损实时监测子系统在托辊侧方安装振动传感器,间距不大于30 m,每300 m设置1台数据采集器,通过网络传输至后台上位机电脑。然后,判断托辊的实时磨损状态并发出指示报警信号,可以避免导致托辊发生故障引起火灾或停机事故。
输煤系统托辊磨损实时监测子系统技术参数如表2所示。
2.2 沿线机器人报警子系统
2.2.1 子系统组成
沿线机器人报警子系统由报警主机、防区处理单元、振动感应光缆、通信光缆、多种传感器、报警控制服务器等组成,系统架构见图2。
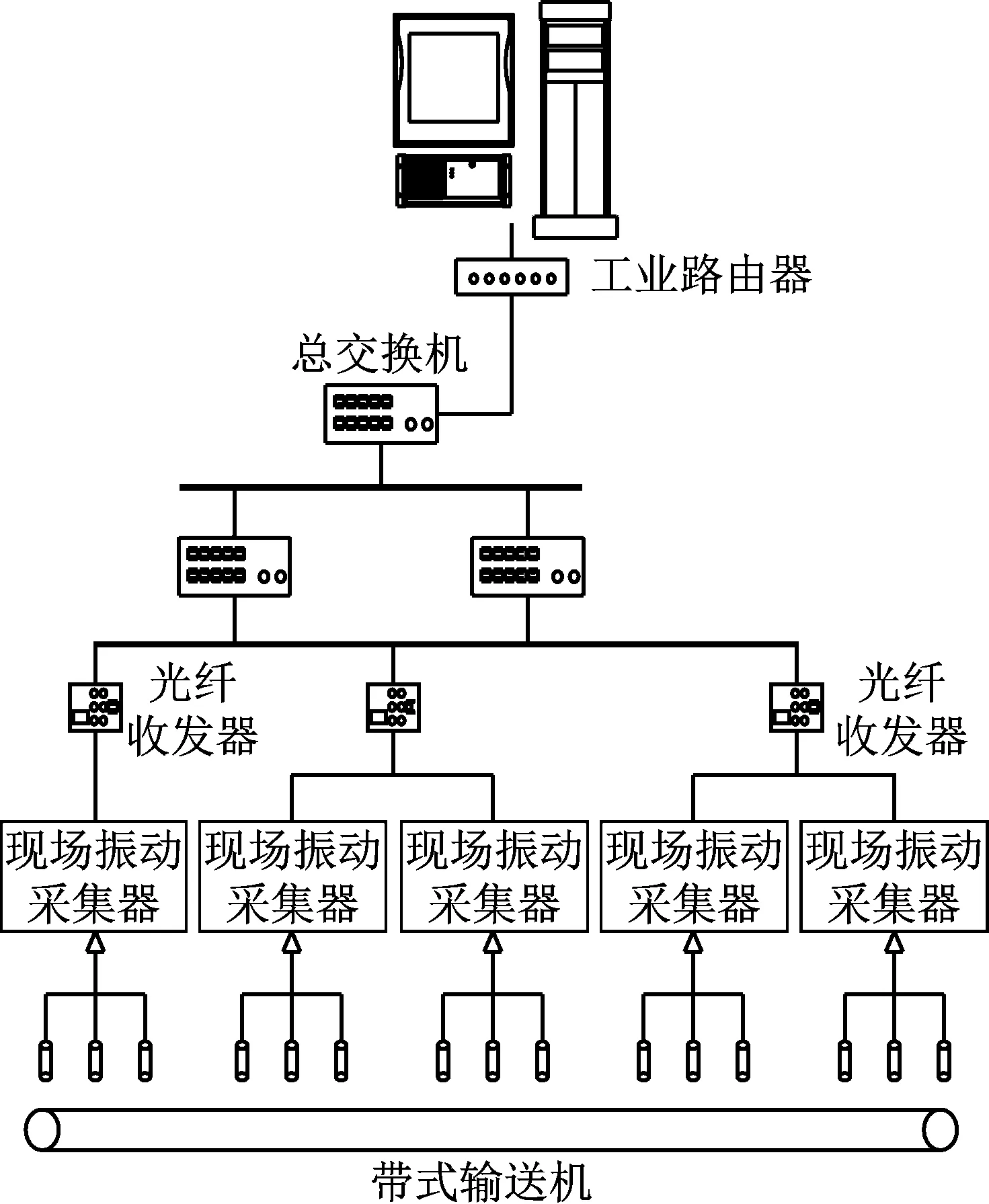
图1 托辊磨损实时监测子系统架构

表2 托辊磨损实时监测子系统技术参数

图2 入侵报警子系统架构
2.2.2 采集分析
井下矿用带式输送机地处井下大巷环境,地势狭窄,周围情况复杂,照度较低,防护外部人员或重物撞击对于安全生产显得尤为重要。设计中利用在井下矿用带式输送机金属外框装设的防爆轨道,使用防爆轨道式机器人代替人工沿线巡检,进行环境检测、声音收集、成像,实现对现场危险气体、安全隐患的检测分析。通过对承载物传递给传感光缆的振动信号进行实时、持续的监控,发现外部事故隐患,并发出报警提示。
1) 视频采集分析。在井下矿用带式输送机的拉紧及中驱两处关键位置增加了辅助视频监控系统。每处设置4路可见光摄像机对关键部位进行监测,4路红外热成像仪对滚筒轴承进行实时温度监测,以确保设备的安全可靠运行,对整个带式输送机运行系统的稳定运行起到关键的作用。防爆轨道安装在行人侧和非行人侧,现场安装2台巡检机器人,一台机器人安装在行人侧,对行人侧的托辊、沿线电缆及管路进行实时监测,发现问题后及时报警并存储;另一台机器人安装在非行人侧,机器人对非行人侧的托辊、外部环境监测系统及束管气体泄漏等进行实时监测。
2) 外部环境参数采集分析。机器人在运行中实时监测现场声音,尤其是托辊声音,对异常声音发出警报,并实时存储。监控室可以通过对音频的回放分析托辊是否损坏,降低了传统巡检工人的劳动强度,提高了带式输送机的安全性,实现减员增效的目的。井下外部环境复杂,有多条气体管道,气体一旦泄露,存在重大的安全隐患。机器人通过搭载气体探测传感器,对现场气体浓度进行实时监测为监测的气体浓度达到设定值时,机器人会发出语音报警,并将实时位置上传到控制室,用户可到相应位置并及时进行分析处理,确保运输系统的安全运行。机器人通过搭载红外热成像仪及在关键部位安装固定红外热成像仪,对设备进行温度监测。当监测温度达到设定值时,机器人发出语音报警。
3) 区域振动感应分析。系统利用防区处理单元、振动感应光缆的采集信息,当外界振动或有应力作用时,其反射波长也会随之发生变化。当确定外界振动的全变化过程时,可以判断安全隐患的发生。通过光纤将光信号传输至报警主机,后台的光纤信号处理器可以接受到光信号的变化,系统软件进行识别判断。通过对比环境因素和其他人为入侵引起的光纤光栅的振动和各种特征参量,过滤环境因素所造成的系统误报,最终发出报警信号。
2.2.3 沿线机器人报警子系统技术参数
沿线机器人报警子系统技术参数见表3。
2.3 主电动机轴承振动监测子系统
井下矿用带式输送机的主电动机轴承在全生命周期运行过程中,其故障特性是一个逐渐发展的过程,从初级故障至故障加剧至轴承使用寿命结束。在此故障变化过程中,其振动也存在一种变化趋势。通过找到该种趋势特征值的变化,来评估主电动机轴承的运行及使用状态。
系统采用振动传感器负责采集现场电动机轴承振动实时数据,将振动信号转化为电信号,并上传至上位机。依据监测数据的故障频率及幅值响应判定轴承的运行状况。通过对通信运行数据的时域和频域的分析,解析异常频率特征在轴承运行状态下的响应,结合其振动响应分析其频率特征,以实现对轴承运行状态的判定,从而达到监测主电动机轴承运行状态的目的,并及时制定排查方案及处理措施,保证机组的稳定运行。同时,避免了传统带式输送机主电动机轴承在运行过程中长时间静止状态后启动运行,造成滚动体和内圈接触区的微小损伤,在加剧振动后逐步恶化,最终影响轴承的使用寿命。系统架构如图3所示。
3 智能矿用井下机器人巡检系统的优势
井下矿用带式输送机的安全生产和无故障运行是非常重要的,实现不间断的安全运营,可确切了解设备的所有参数,预知性地了解设备的异常故障、磨损状况及寿命预测,使管理人员可以提前预知机电设备可能产生的各种情况,预先做好应急预案,以达到合理安排生产和使用计划、减少设备非计划停机、降低维护成本的目的。智能矿用井下机器人巡检系统的优势为:

表3 报警子系统参数

图3 主电动机轴承振动监测子系统架构
1) 该系统是一套综合智能化巡检系统,涉及到检测、通讯等多种现代科学技术的融合。它对曹家滩煤矿的智能化矿山起到积极的作用。
2) 该系统协同带式输送机监控系统的整体工况和运行状态,可通过数据变化的提前预警降低设备的故障率和人工成本,反映现场实际情况及设备运转状况,使带式输送机长期处于良好的连续运转状态。
3) 该系统可以使设备检修的针对性更强,变故障修为状态修,变人工巡检为自动故障监视,减轻维护人员的工作强度,达到无人操作。此外,该系统还有利于提高设备的安全和健康运行,延长使用寿命,同时防止外来人员或重物的碰触,消除安全隐患,保证连续生产,从而创造巨大的经济效益。
4 结论
本文介绍了曹家滩煤矿井下带式输送机机器人巡检系统的应用。目前该设计项目已经完成建设及安装调试工作,正处在运行阶段。系统充分利用了矿井智能化技术,将传统带式输送机监控系统、机器人巡检系统与智能化有机结合,异构联动,达到“无人巡检”的工作状态,有效减少了管理维修人员不能实时了解托辊的磨损状况、托辊损坏不能及时更换,管理人员人工巡检有误报或漏报的现象,防止外来人员或重物碰触带式输送机影响带式输送机正常运行。在运行期间得到业主的一致好评,取得了巨大的经济效益,为曹家滩煤矿井下输煤系统的安全长时间运行提供了可靠保障。
