基于PMSM的2种矢量控制仿真对比研究
2020-12-26玄兆燕刘倩景会成赵欣闫建行
玄兆燕,刘倩,景会成,赵欣,闫建行
(1.华北理工大学 机械工程学院,河北 唐山 063210;2.华北理工大学 电气工程学院,河北 唐山 063210;3.唐山市拓又达科技有限公司,河北 唐山 063020)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor ,简称PMSM)以其体积小,原理简单,效率高等优点被广泛应用[1]。目前主流控制策略包括磁场定向矢量控制(Field Oriented Control,简称FOC)和直接转矩控制(Direct Torque Control,简称DTC)2种。直接转矩控制原理简单,系统动态性能好,但转矩脉冲大、控制精度低,低速性能不佳[2]。如今,对于永磁同步电机,运用较为广泛的控制方法是矢量控制。矢量控制策略可获得最大线性转矩,也可利用电机过载能力,提高电机启、制动速度,保证电机制动性能。
矢量控制是一个双闭环控制系统,包括速度外环控制和电流内环控制。常用速度环控制有比例谐振控制(Proportional Resonant,简称PR)、PI速度控制和滑膜速度控制(Sliding Mode Control,简称SMC)等。PR速度控制利用基频处的谐振得到基频处的增益,实现无静差控制,对于非基频处的谐波无法消除[3]。PI速度控制结构简单,抗干扰能力差,稳态精度低。SMC变结构控制系统算法一般,响应速度快,对外界噪声干扰具有鲁棒性[4]。
该项研究在永磁同步电机的矢量控制基础上,针对转速环部分建立了PI自适应控制策略与滑膜控制策略,通过对2种控制器的设计,搭建MATLAB/Simulink仿真模型,根据两者的电磁转矩,电机转速及三相电流仿真曲线分析2种方法的优劣性。结果表明,基于滑膜速度控制器矢量控制策略动态响应速度快,鲁棒性更好。
1 PMSM矢量控制原理


图1 永磁同步电机的矢量控制框图
2 PMSM的矢量控制方法
2.1 基于PI调节器的PMSM矢量控制
2.1.1 PI调节器的基本原理
永磁同步电机PI调节器控制包括速度外环控制和电流内环控制[7]。PI速度控制又称比例+积分控制,其中比例控制器的输出与输入误差信号成比例关系,积分控制器的输出与输入误差信号的积分成比例关系。因此,PI控制器对偏差累积进行控制,直至偏差为零。图2所示为基于PI控制器的PMSM矢量控制框图。

图2 基于PI控制器的PMSM矢量控制框图
2.1.2 转速环PI控制器的参数整定
传统的转速环PI控制器的表达式
(1)
式中:Kpω为比例增益;Kpω为积分增益;ωm为电机的机械角速度(rad/s);Bα有功阻尼系数(N·m·s)。
因此,PI控制器的参数kpω,kiω可由下式确定:
(2)
式中:β为转速环频带带宽(rad/s);J为电机转动惯量(kg·m2);pn为电机极对数;ψf为电机磁链(Wb)。
根据式(2)搭建的仿真模型如图3所示。
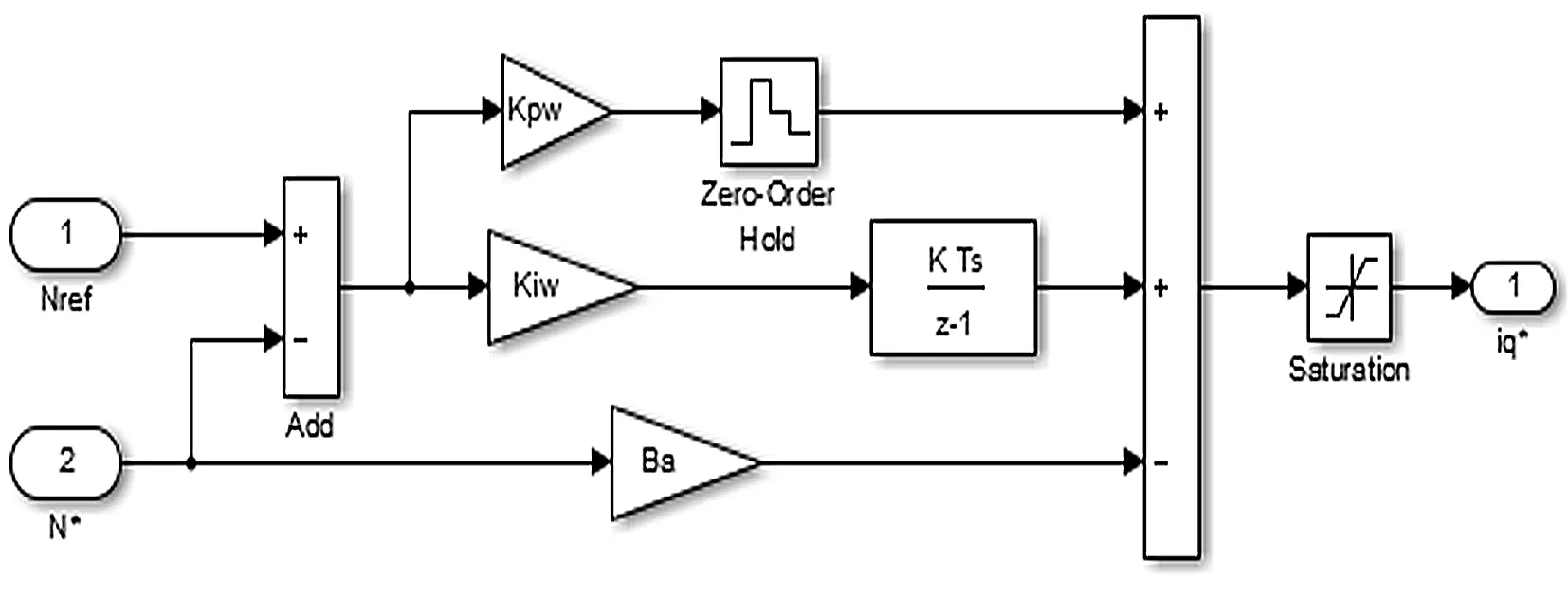
图3 速度环PI控制器的仿真模型
2.2 基于滑膜速度控制器的PMSM矢量控制
2.2.1 滑膜控制的基本原理
滑膜控制(变结构控制)是一种特殊的不连续性的非线性控制[8]。即根据系统状态方程确定出一种切换函数,从而设计出一个切平面,使切换面以外的运动点在有限时间内到达切换面[9]。图4所示为基于滑膜速度控制器的PMSM矢量控制框图其原理与图1基本相同,其不同在于采用转速环SMC调节器。
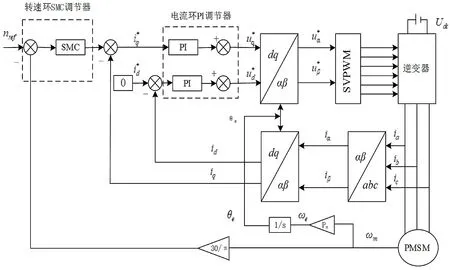
图4 基于滑膜速度控制器的PMSM矢量控制框图
2.2.2 滑膜速度控制器的设计
定义线性滑膜切换面函数为:
s=cx1+x2
(3)
式中:c>0为滑膜控制参数。
对式(3)求导可得:
(4)
因PMSM本身具有良好的动态性能,所以采用指数趋近律方法可以得到滑膜控制器的表达式:
(5)
式中:0<ε<1。
进而得到q轴的参考电流:
(6)
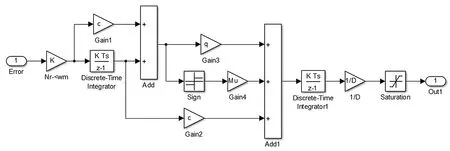
图5 滑膜速度控制器的仿真模型
3 仿真分析
永磁同步电机各项参数如表1所示。

表1 电机参数
基于PI控制器的PMSM矢量控制仿真中,各参数设置为:直流测电压Udc=311 V,PWM开关频率fPWM=10 kHz,采样周期Ts=10 μs,相对误差为0.000 1,仿真时间为0.4 s。其中PI控制器中的参数:转速环β=50 rad/s,Bα=0.013,Kpw=0.15,Kiw=7.5,仿真结果如图6所示。

图6 PI调节器的转速、转矩和三相电流仿真曲线
基于滑膜速度控制器的PMSM矢量控制仿真中,各参数设置为:直流测电压Udc=311 V,PWM开关频率fPWM=10 kHz,采样周期Ts=10 μs,相对误差为0.000 1,仿真时间为0.4 s。其中滑膜控制器中的参数为:c=60,ε=200,q=300。所得结果如图7所示。
根据MATLAB仿真曲线,2种矢量控制下各项数据如表2、表3所示

表2 2种矢量控制下电机转速仿真中各项数据

表3 2种矢量控制下电磁转矩仿真中各项数据
4 结论
(1)两种控制策略均能使系统稳定运行,滑膜控制器控制策略具有更好的快速性和稳定性。
(2)PI控制器算法简单,可靠性高,但参数整定过程中变量较多,不易掌控,易受外界扰动的影响。当电机内部参数变化时,PI控制器的性能会随之改变。而滑膜控制器矢量控制策略虽然算法复杂,但易掌控,对系统模型精度要求不高,对参数变化和外界干扰不敏感,具有良好的鲁棒性和动态性能。