复杂云背景环境红外特性仿真建模方法研究
2020-12-26贾荣泉
贾荣泉,王 力
(北京控制与电子技术研究所,北京 100038)
0 引 言
目前,红外探测技术在许多领域得到了日益广泛的应用。云背景环境是红外探测的一种重要干扰因素,会对红外探测目标识别产生重要影响。云背景干扰对探测性能影响是非常复杂的,涉及很多不确定情况。一方面,当云层面积较大时,云层完全覆盖目标区域,若云层较薄则目标辐亮度将大大减弱,清晰度也会受到一定程度的影响,对目标探测检测识别造成困难;若云层较厚则会完全遮挡目标,导致目标丢失。另一方面当云层未覆盖目标区域(如小块碎云)时,其碎云数量、形状、大小、目标区域覆盖率均不确定,此类干扰会形成目标虚景。因此,在开展红外探测研究中,需要构建大量的含有目标场景、云背景环境等要素的综合场景,用来评估系统的探测性能。而云背景建模是考虑云的几何特征、红外辐射特性的复杂多样性问题,因此云背景仿真图像样本量通常是比较大的。
由于云背景没有规则的几何结构,形状大小均具有随机性,很难用常规的建模方法或模拟技术进行仿真。另外云背景辐射受到很多因素的影响,云自身的温度、厚度、外部大气环境、阳光照射等都会对云的光学特性造成影响,因此云背景建模存在较大难度。陈海等[1]为丰富云的纹理细节,增强云边缘絮状结构的真实感,使用不同的随机分布函数生成云粒子面片,可实时模拟出不同类型和不同尺度的云;汪归归等[2]采用基于超亚椭圆体表达式及软粒子的方式对云层进行了建模和绘制,提高了云层绘制的效率与可交互性;徐江斌等[3]提出了一种交互式过程隐函数云建模方法,充分利用隐函数的优势来加速建模绘制,在保持宏观结果的前提下自动生成更复杂细节的云模型;程飞等[4]采用基于面向对象图形渲染引擎(object-oriented graphics rendering engine,ORGE)的方法对云背景进行仿真建模渲染,计算云背景红外辐射特性;赵燕杰等[5]采用逐线积分法计算大气分子吸收,结合离散纵坐标法建立卷云条件下的光辐射传输模式,分析了卷云红外辐射特性。但是以上研究重点均是针对云的几何特性与红外辐射特性进行建模,仿真结果大多只进行简单的线性灰度量化,没有考虑探测装置对仿真结果的影响,且缺乏仿真图像红外特性的真实性验证。
红外云背景建模既要考虑云的几何特征、红外辐射特性的多样性,还要考虑红外成像系统、大气传输及环境之间相互作用的影响。本文提出了粒子系统及实拍图像两种云的几何特性建模方法,综合考虑了云背景红外辐射模型、大气辐射特性与红外探测装置模型,通过仿真渲染得到特征多样的云背景灰度图像样本,并对仿真云图红外特性的真实性进行了验证。
1 云背景环境几何特性建模
1.1 粒子云模型构建
粒子系统的基本思想是采用许多形状简单的微小粒子作为基本元素来表示不规则模糊物体,如火焰、烟雾、水流等。云作为一种气体现象,由无数小水滴(微小颗粒)组成,形状多变且不规则,无法应用准确的三维图形对云的外形进行模拟。而粒子系统作为迄今为止被认为模拟不规则模糊物体非常有效的一种图形生成方法,适用于云模型构建。
在粒子云建模过程中,需根据云层大小确定云粒子数量,另外还要给出粒子的属性特征。通常,粒子的属性分为粒子运动属性和粒子绘制属性:粒子的运动属性包括粒子的位置、速度、加速度;粒子的绘制属性则包括粒子的大小、颜色、亮度、形状以及生命周期等。
经典粒子系统中粒子的初始位置由粒子系统在给定的范围内随机给出,通常分布在一个三维网格空间中,针对云团中心粒子密集、边界稀疏的特点,对粒子的位置采用高斯随机函数来描述,即
Pc i=Pc 0+R·Grand(·)
(1)
式中:Pc i为任意云粒子位置坐标;Pc 0为云团中心位置坐标;R为云团半径;Grand(·)为高斯分布随机数,变化区间为[0,1]。
在云的绘制过程中,可以通过随机地控制粒子的大小来增加真实感,云粒子半径为
(2)
式中:ri为任意云粒子半径;Li为云粒子与云团中心的距离。
根据仿真需求,需要大量多样性强的云背景样本对红外探测识别算法进行考核及性能评估。运用粒子系统建立云模型需模拟积云、层云、卷云等不同类型以及不同形状的云背景,每种云背景都需要手动调节云粒子的数量、位置、大小、运动方向、速度等参数,工作量过大,短时间内无法生成大量云背景。另外当视场覆盖区域较大时,所需粒子数量巨大,造成云背景渲染时间过长,仿真效率较低。粒子云背景几何建模效果如图1所示。

图1 粒子云背景几何建模效果Fig.1 Geometric modeling effect of particle cloud background
1.2 实拍云模型构建
由于粒子云针对每种不同的云背景都要做大量的工作对云的形状与分布进行调整,因此需要一种效率更高的建模方法对云背景进行几何建模。基于实拍云图像构建云的几何特征模型是一种可行的技术途径,实拍云获取方便,且采用真实云图像的方式可以大大提高云模型的真实感。
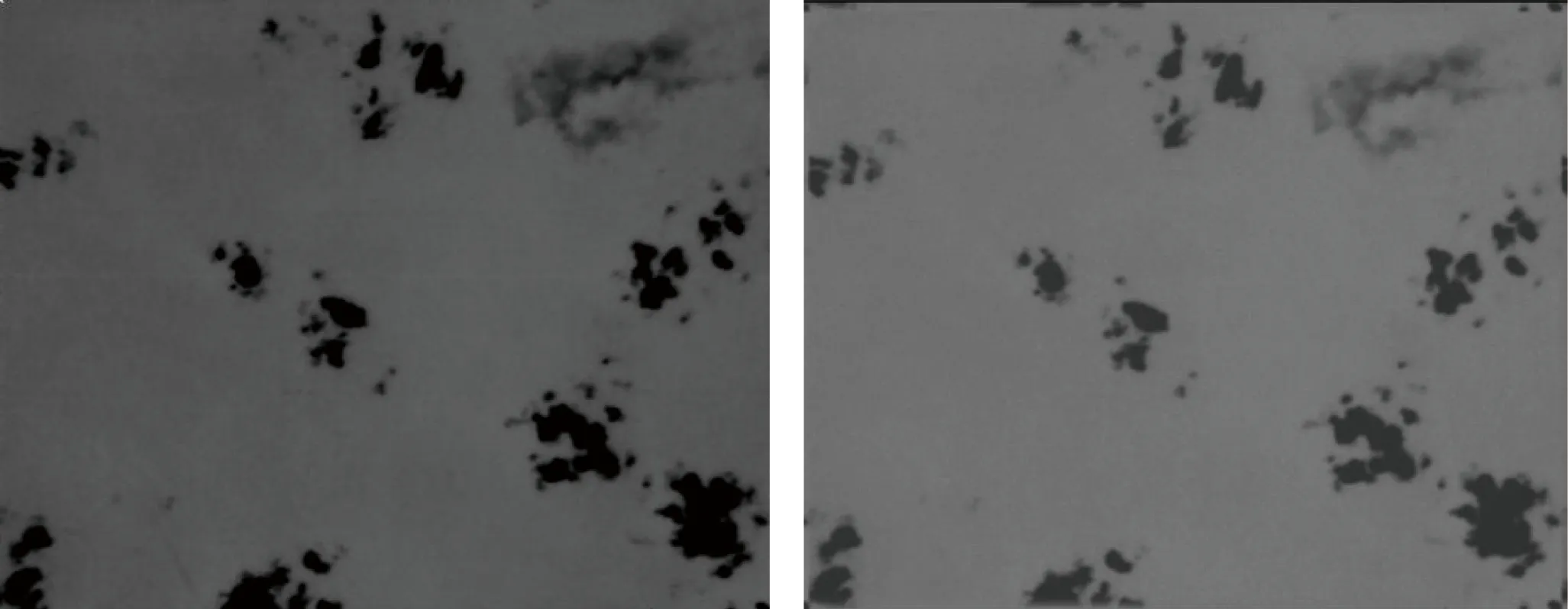
收集积云、层云、卷云等云背景高清实拍图像纹理数据,对图像中云的几何模型部分进行提取,将云模型部分与实拍图背景剥离,并进行修补、模糊等处理得到实拍云模型,对处理好的云模型图像进行常规的图像变换,包括裁剪、平移、旋转、缩放、翻转、加噪等。如图2所示,同一张实拍云图像可以得到多个云背景模型,提高云背景几何建模效率。


图2 实拍云背景(左)与经处理后的云背景(右)
根据仿真条件加载相应种类及云层覆盖率的云背景纹理图片并设置对应云层高度、厚度、位置、长宽等参数。以弹目视线与水平面交点为原点,弹目视线在水平面的投影为y轴,垂直于水平面方向为z轴,建立右手坐标系,则高度为h的云背景中心点坐标为
(3)
式中:h为云层高度;θ为弹目连线与水平面的夹角。
高度为h的云层仿真区域大小为
(4)
式中:Lx为云层在x方向的长度;d为弹目距离;γx为探测装置在x方向的视场角;Ly为云层在y方向的长度;γy为探测装置在y方向的视场角,γx和γy为小角度。
与粒子系统建立云背景模型相比,实拍云背景建模效率更高,且不需渲染大量粒子,占用较少渲染资源,真实感更强。
2 云背景辐射特性计算
云背景红外辐射特性受多种因素影响,计算过程较为复杂。为表示云滴的谱分布特征,通常采用的是一个修正的Gamma函数分布,即
n(r)=α1rα2e-α3r
(5)
式中:α1是总的数密度;α2、α3是由观测经验确定的形状参数;r为云滴半径。对于不用种类的云背景,上述系数也有一定的不同,表1中给出了几种典型云的粒子尺度分布模型参数。

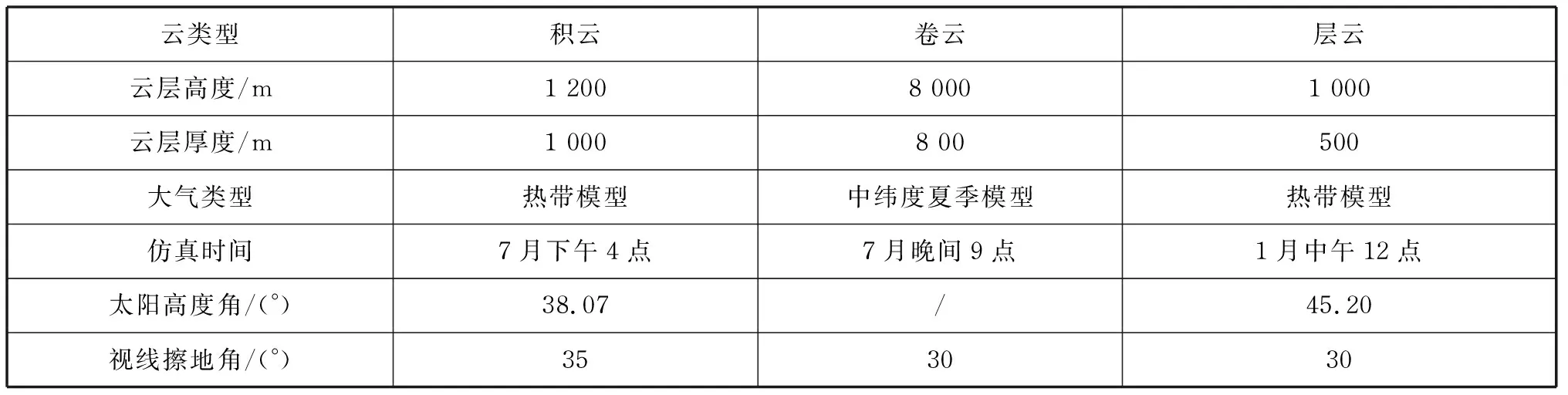
表1 典型云的粒子尺度分布模型参数Tab.1 Parameters of particle size distribution model for typical clouds
根据Mie散射理论[6]及云滴谱密度分布函数,可计算得到云的散射截面积Cs及消光截面积Ce,则云背景散射系数及消光系数为

(6)
(7)
云背景的吸收系数为
(8)
式中,ρw云粒子密度,通常取1。
本文主要仿真对海、对陆探测时获取的云背景,因此探测装置所接收的云背景辐亮度Lcs为
Lcs=(Ls+La1+Lg+Lc)·ta+La2
(9)
式中:Ls为太阳直射云背景后反射到达探测装置的辐射;La1为地面与云背景之间的大气路径辐射;Lg为地面背景通过云层的辐射;Lc为云背景自身辐射;ta为云背景到探测装置的大气透过率;La2为云背景到达探测装置的大气路径辐射。
假设云背景密度均匀且各向同性,则云层透过率为
tc=e-σe d
(10)
式中:tc为云层透过率;σe为云层消光系数;d为云层厚度。
在计算云背景对太阳的反射时将太阳视为点源,则Ls为
(11)
式中:ρc为随波长变化的云层反射系数;Es为太阳辐照度;θ为太阳辐射传输方向与云层表面法线夹角。
地面背景的辐射随着地面类型(海洋、沙漠、森林、城市等)的改变而变化,则地面辐射Lg为
Lg=tcEgρg
(12)
式中:Eg为地面的红外辐射;ρg为随波长变化的地面反射系数。
将云背景视为一个灰体,计算云背景自身辐射Lc为
(13)
式中:c1为第一辐射常量;c2为第二辐射常量;Tc为云背景温度;λ为波长。
本文采用MODTRAN计算大气透过率,计算时需要输入大气模型、气溶胶模型、波段和几何路径等参数,输出为该波段下的平均大气透过率,大气辐射等数据也可通过设置参数利用MODTRAN进行计算[7]。
3 红外探测装置建模
红外探测装置通过将辐亮度数据转换为电信号,再将电信号转换为灰度图像,各转换阶段均可简化为线性关系[8-9]。
通过已知的探测装置几何尺寸与光学性能数据可以得到红外探测装置辐射通量与辐亮度之间的关系为
(14)
式中:Φij为辐射通量;s为红外探测装置像元面积;d红外探测装置口径;f为红外探测装置焦距;Lij为渲染场景得到的辐亮度矩阵中任意元素。
红外探测装置辐射通量与电信号的转换关系为
(15)
式中:Vij为光信号转换得到的电压值;Rv为红外探测装置响应率;Vmin为零灰度所对应红外探测装置电压值;Vmax为红外探测装置所能输出的灰度最大值所对应的电压值。
由于红外探测装置所成图像灰度值与红外探测器电信号呈线性关系,因此可以得到电信号与图像灰度值之间的关系如式(16)所示。
(16)
式中:Gij为辐亮度矩阵中Lij所对应的输出灰度矩阵中的元素灰度值;Gmax为红外探测装置所能输出的灰度最大值。
红外探测装置在探测成像时,存在边缘模糊效应,其具体实现为

1 (17) 式中:G′(i,j)为添加边缘模糊效应后的灰度矩阵第i行第j列的灰度值;G为添加边缘模糊效应前的灰度矩阵;C为各元素和为1的系数矩阵;l为灰度矩阵行数;k为灰度矩阵列数[10]。 将红外探测装置的噪声视为高斯白噪声,在探测视距较远的实拍图中,圈出均匀性较好的背景区域,计算其灰度标准差,则随机噪声概率密度函数为 (18) 式中,σ为实拍图中均匀背景区域灰度标准差。 基于上述云背景红外辐射特性仿真方法,设置不同的仿真条件,分别对积云、卷云、层云3种类型的云背景进行仿真建模,云背景仿真相关参数如表2所示。 表2 云背景仿真参数Tab.2 Cloud background simulation parameters 经过实拍云模型构建、红外特性计算及渲染,得到典型云背景仿真图像结果如图3~5所示,基于粒子系统云模型构建的云背景仿真图像如图6所示。 图3 积云仿真图像Fig.3 Cumulus simulation image 图4 卷云仿真图像Fig.4 Cirrus simulation image 图5 层云仿真图像Fig.5 Stratus simulation image 图6 基于粒子系统云模型构建的云背景仿真图像Fig.6 Cloud background simulation image based on particle system cloud model 云背景辐亮度受多种条件影响,如阳光照射、大气条件、云层厚度等因素。图3积云仿真图像中,探测装置方位与太阳方位相对,可以明显看出仿真图像中积云上部的灰度值大于积云下部,能够反应出云层对太阳辐射的反射特性;图4卷云仿真图像中,卷云为高空云,含水量较少,在夜间辐亮度低于背景;图6基于粒子系统云模型构建的云背景仿真图像云层灰度单一,与实拍图所构建云背景相比真实感较差[11]。 将卫星实拍图中的实拍云进行处理并贴入仿真场景进行仿真,卫星实拍图与仿真图像对比如图7所示,二者云红外特性对比如图8及表3所示[12]。 图7 卫星实拍图(左)与仿真图对比(右)Fig.7 Comparison between satellite picture (left) and simulation image (right) 图8 卫星实拍图(左)与仿真图红外特性对比(右)Fig.8 Comparison of infrared characteristics between satellite picture (left) and simulation image (right) 表3 卫星实拍图与仿真图像红外特性对比Tab.3 Comparison of infrared characteristics between satellite picture and simulation image 通过对比可知,实拍图与仿真图目标灰度、目标背景灰度差、信噪比等红外特性数据误差百分比均在15%以内。仿真结果表明,基于实拍图生成的云背景图像真实感强,复现了不同条件下云背景辐亮度的变化情况,通过大量的云背景几何建模、仿真参数设置,可以生成多种特征的云背景红外特性仿真样本,仿真云图红外特性真实可靠[13]。 本文针对红外探测云背景环境干扰适应性仿真评估需求,提出了云背景仿真建模方法,采用粒子系统及实拍图像两种方法开展几何特性建模,构建生成了典型云背景红外特性仿真图像。其中基于实拍云建模方式可以获得更加真实的图像纹理特征,并可获得较高建模效率,生成的云背景图像逼真度高,红外特性真实可靠,可以满足多种特征的云背景红外特性仿真需求。4 仿真结果






5 结束语
