融合无人机与相机影像的三维建模方法在古建筑保护中的应用
2020-12-24陈款张小可涂峻伦杨正阳
陈款 张小可 涂峻伦 杨正阳
摘 要:三维数字化重建已经成为古建筑保护的重要途径之一。无人机倾斜摄影测量技术数据采集范围大、效率高,但由于无人机的拍摄距离较远、存在阴影、建筑自身结构相互遮挡等很难精细、完整采集古建筑的三维数据信息。针对上述现状,文章提出融合无人机与相机影像的三维建模方法,以桂林市月岭古村牌坊为试验对象,采用该方法对牌坊完成了三维重建。试验结果证明该方法具备采集设备成本较低、现场数据采集全面、三维建模精度高等优势,在古建筑保护中有极高的应用价值。
关键词:三维重建;古建筑;无人机
中图分类号:TU18 文献标志码:A 文章编号:2095-2945(2020)26-0030-03
Abstract: 3D digital reconstruction has become one of the important ways to protect ancient buildings. The UAV tilt photo grammetry technology has the advantages of a wide range of data collection and high efficiency, but it is difficult to collect the 3D data information of ancient buildings precisely and completely because of the long shooting distance, shadow and mutual occlusion of the building structure. In view of the above situation, this paper proposes a three-dimensional modeling method which integrates UAV and camera images. Taking the ancient village archway of Yueling in Guilin as the experimental object, the archway has been reconstructed by this method. The experimental results show that this method has the advantages of low cost of acquisition equipment, comprehensive field data acquisition, and high precision of 3D modeling, thus having high application value in the protection of ancient buildings.
Keywords: 3D reconstruction; ancient architecture; UAV
引言
古建筑承载着悠久文化积淀,一旦损毁,古建筑本身及其承载的历史文化信息将不复存在。基于倾斜摄影测量的三维数字化重建具有无损、快捷灵活、精度高等优势[1],已经成为古建筑保护的重要途径之一。
无人机倾斜摄影测量技术作为一种新兴的技术方法,在三维建模和工程测量中有着广泛的运用前景[2]。无人机倾斜摄影技术数据采集范围大、效率高,但由于无人机据文物拍摄距离较远、存在阴影、建筑自身结构相互遮挡等很难精细、完整还原文物的三维数据信息。相机以其拍摄角度自由、操作灵活能对无人机影像提供有效补充。结合无人机与相机的优势,以桂林市月岭古村牌坊为试验对象,提出融合无人机与相机影像的三维重建方法。
1 融合无人机与相机影像的三维重建方法流程概述
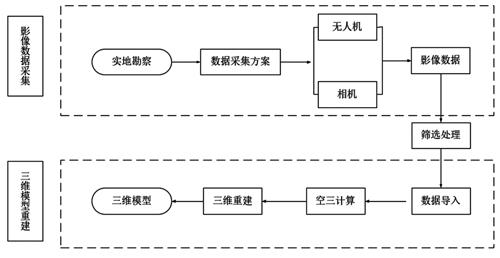
三维重建流程。融合无人机与相机影像的三维重建方法是基于倾斜摄影测量技术,其基本原理是使用无人机及相机完成对文物多角度、全方位的影像数据采集,得到文物多个角度的纹理影像;通过相关的算法识别提取出多幅影像间的同名像点,通过摄影中心、物点及像点的共线条件方程得到同名像点的概略位置,完成影像匹配;基于影像的内、外方位元素,建立与测区对应的航带模型或区域网模型,采用解析法对多条航带进行联合整体平差,完成空中三角测量;通过密集匹配生成密集的三维点云;根据点的空间相对关系,构建出不规则三角网;根据纹理影像和三角形面片之间的空间关系完成纹理映射,最后输出带有真实纹理的三维模型。融合无人机与相机影像的三维建模流程主要分为两个部分:影像数据采集和三维模型重建。该方法的技术流程如图1。
2 数据采集与三维重建
2.1 实地勘察
牌坊高10.2m,长13.2m,跨度11.05m,周边空旷,坊上雕刻全由整块石料镂空及浮雕而成,镂空、浮雕部分由于相互遮挡,单一使用无人机难以完整采集其影像数据;而且无人机受数据采集的精度限制也无法精准还原牌坊刻字的三维信息。本次试验采用无人机与相机对牌坊进行影像数据采集。
2.2 数据采集
本次试验所用设备主要有:大疆PHANTOM4 PRO飞行平台、索尼α6000相机、高拍架、反光板等。
使用反光板对牌坊的镂空部位进行补光,采用无人机距牌坊约5m处环绕牌坊进行影像采集;无人机采集完成后采用相机对牌坊的关键部分进行补拍,通过调整相机焦距或移動相机保证采集影像的重叠度;使用高拍架采集牌坊上方部分的影像。通过拍摄距离与影像采集范围的关系,确保无人机与相机影像之间的重叠度不低于75%。通过公式(1)计算出无人机在距牌坊5m处拍摄的横向间距0.67m,纵向间距0.41m;相机在焦距设置为16mm时在距牌坊2m处拍摄的横向间距0.48m,纵向间距0.32m。
式中:l为拍摄距离;f为镜头焦距;worh为宽或高(水平方向或垂直方向)。
2.3 三维重建
PhotoScan依据一系列图像中对应元素间的视差,反推所拍摄物体的几何形状和在空间中的位置,从而生成数字三维模型,在建筑遗产数字测绘有广泛应用[3]。对所采集影像进行消畸变处理后,将其导入PhotoScan完成空三计算,如图2。
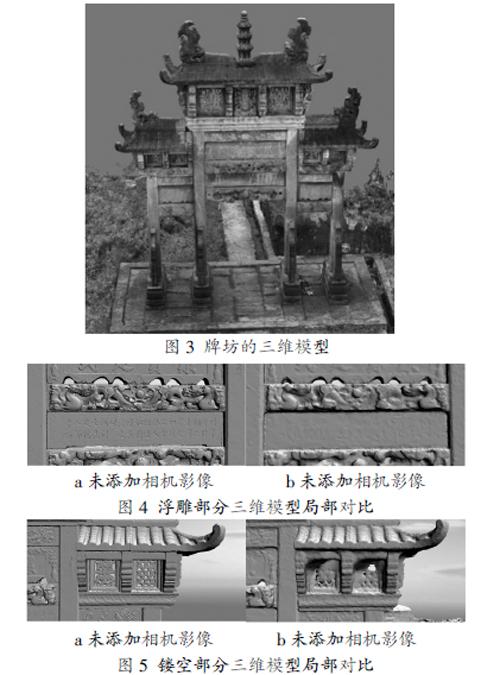
目前应用最广泛的基于数码照片生成全景三维模型的软件是Bentley公司的ContextCapture,能够基于数字影像照片全自动生成高分辨率真三维模型[4]。将空三计算任务导入ContextCapture,进行三维重建,输出带有真实纹理的牌坊三维模型,如图3。
3 三维模型精度分析
对比基于无人机倾斜摄影的三维重建模型,融合无人机与相机影像的牌坊在整体的质量上都有了明显提升,尤其在浮雕及镂空部分,如图4和图5。
采用ArtecTMEva手持三维扫描仪(标称精度0.1mm)建立牌坊的部分三维点云模型,以点云模型为参照对象,用以评估融合无人机与相机影像的三维建模方法所建牌坊三维模型的精度。
分别测量两组三维模型中的同一特征点坐标,如图6。共30组的坐标偏差检测结果如表1。
分析表1中数据可知,牌坊三维重建模型的最大偏差为0.89mm,平均中误差为0.47mm。
4 结论
融合无人机与相机的三维建模方法能详实记录古建筑的外观及三维尺寸信息,为日后的维护、修缮甚至重建提供了有力的数据支撑。通过对桂林月岭市月岭牌坊的三维重建试验得出该方法有以下优势:
(1)结合无人机与相机对古建筑进行影像数据采集,所获取的数据信息完整、全面。
(2)采用消费级无人机与非量测相机对古建筑进行影像数据采集,设备成本低,有助于大规模推广。
(3)通过对月岭牌坊的试验证明该方法的测绘精度高,所建三维模型的最大偏差为0.89mm,平均中误差为0.47mm。
综上所述,融合无人机与相机影像的三维建模方法在古建筑保护中有非常高的实际应用价值,并且具有良好的推广前景。
参考文献:
[1]孙保燕,杨正阳,陈款,等.融合航摄影像与地面照片三维重建技术在考古中的应用[J].科学技术与工程,2019,19(17):262-266.
[2]周梦宇.基于倾斜摄影测量的三维建模技术[J].中国科技信息, 2019(07):84-85.
[3]吴嘉琦,胡振宇,石佳惠.基于PhotoScan的建筑摄影测绘中图像采集优化研究[J].城市建筑,2020,17(05):90-93.
[4]陳曦.倾斜摄影技术在集通高速公路通化连接线项目建设管理中的应用[J].信息与电脑(理论版),2018(19):31-33.
