卫星对接捕获的地面微重力验证系统
2020-12-24杨海涛安升辉
丰 飞,杨海涛,安升辉
(1.江苏集萃华科智能装备科技有限公司,江苏 无锡 214000;2.华中科技大学无锡研究院,江苏 无锡 214000)
0 引言
近几十年来,全世界每年都有各种类型的航天器(卫星等)发射进入太空,同时,由于各种原因大量航天器也会发生失效或报废,如某些组件失灵或燃料在完成其任务之前耗尽,这些情况往往会造成巨大的经济损失[1- 2]。基于上述原因,航天器在轨服务(在轨维修和在轨维护)具有非常广泛的应用需求,各国科学家都在围绕这一主题开展相关关键技术研究。卫星在轨服务正在成为航天工业领域中一个非常具有挑战性和重大意义的课题和研究方向。
卫星在轨对接捕获操作是实现其在轨服务任务最关键的一步,对卫星在轨服务任务来说至关重要。卫星在轨服务的主要目的是实现其寿命延长、故障维修、在轨维护、在轨组装和在轨燃料加注等空间任务。
2007年德国宇航局(DLR)提出了一项新的在轨维修任务,被称为“德国轨道服务任务”(DEOS)[3-4]。其主要目的是通过安装在自由飞行服务卫星上的机械臂系统,来演示在轨交汇和捕获翻滚的非合作目标卫星的任务。德国宇航局的另一项在轨维修任务计划是轨道寿命延长飞行器(OLEV)[5-7],该系统用于在轨维修正在遭受推进剂耗尽的对地静止通信卫星并延长其在轨使用寿命。美国国防高级研究计划局(DARPA)资助了轨道快车项目,主要用于验证搭载空间机械臂的服务卫星进行航天器在轨维修任务的技术可行性,验证内容包括了卫星在轨交汇、捕获、维修、器件更换和补充燃料等空间技术[8-9]。日本成功发射了国际上第1个自由飞行空间机器人系统——“工程测试卫星VII”任务(ETS-VII),这是世界上第1个配备了机械臂的卫星,其发射成功是空间在轨服务的一个重要里程碑事件,极大推动了世界各国空间在轨服务项目的研究[10-11]。
1 卫星对接系统及其动力学特性
1.1 卫星对接系统
目前,在轨航天器绝大多数都是非合作目标卫星,不具备在轨维修的专用捕获或对接接口。为了解决卫星的对接或捕获问题,需要预先确定卫星对接或捕获接口以设计专门的对接或捕获工具。考虑到大多数卫星上所具有的共性特征,卫星的发动机喷嘴大小和形状非常适合用作理想的卫星对接或捕获接口。
在轨服务卫星的对接捕获系统如图1所示,该系统包括目标卫星和服务卫星。目标卫星上是在轨服务任务的目标,其本身具有发动机喷嘴以及火箭对接环,可以用作对接捕获接口。服务卫星用于执行在轨服务任务,其卫星本体上安装有太阳能帆板、全色高分辨率相机,以及专门针对目标卫星发动机喷嘴而设计的对接捕获机构。
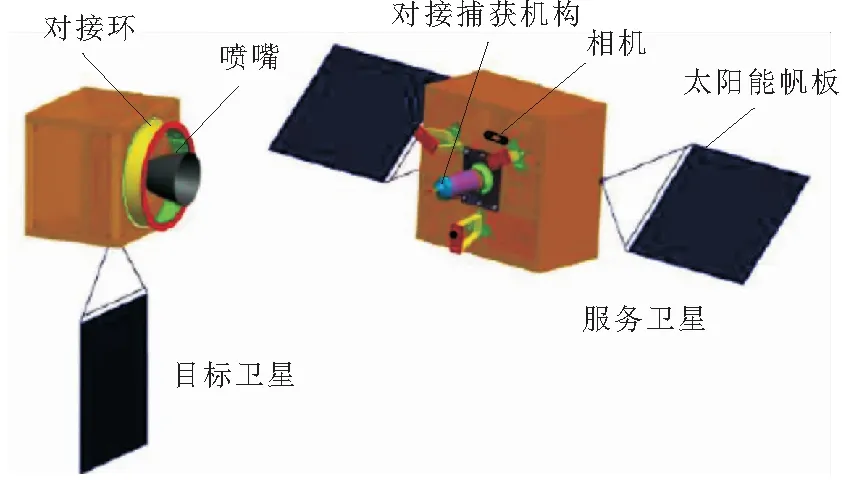
图1 服务卫星和目标卫星系统
1.2 服务卫星和目标卫星对接捕获动力学
为了简化两卫星在轨对接捕获过程中接触碰撞的动力学分析,可以考虑将目标卫星假定为自由漂浮的单刚体,暂时不考虑其轨道动力学。假设服务卫星在对接捕获过程中接触碰撞单刚体目标卫星。在接触碰撞过程中,采用牛顿-欧拉方法分别建立服务卫星和目标卫星的动力学模型为:
(1)
(2)
MS和MT分别为服务卫星和目标卫星的广义质量矩阵;VS和VT分别为服务卫星和目标卫星的广义速度矢量;FeS和FeT分别为服务卫星和目标卫星的广义外力矢量;FfS为服务卫星的科里奥利力、阻尼力和离心力等力矢量;FfT为目标卫星的科里奥利力、阻尼力和离心力等力矢量;JS和JT分别为服务卫星和目标卫星的雅克比矩阵;FC为服务卫星和目标卫星在对接过程中由于碰撞冲击引起的广义力矢量。
2 卫星对接捕获地面验证系统方案
卫星对接捕获的地面微重力验证系统,是用于验证服务卫星在太空中对接捕获目标卫星过程中运动状况,目前采用硬件在环仿真方法来实现。该地面验证系统的组成架构如图2所示,主要包括实际硬件结构和软件系统。该系统的实际硬件主要由2台地面工业机器人、六维力/力矩传感器、视觉相机、对接捕获机构、服务卫星模拟器和目标卫星模拟器组成。软件主要包括重力补偿、接触动力学、末端运动学等效和卫星的动力学模拟软件等,主要用于模拟及计算服务卫星和目标卫星的在轨实际运动状态。

图2 地面微重力验证系统组成
卫星对接捕获的地面微重力验证系统的实现方案如图3所示。目标卫星的运动模拟是通过工业机器人T的运动实现的。目标卫星在自由空间运动可以按照在微重力环境下单刚体运动来进行运动轨迹规划。当服务卫星的对接捕获机构接触碰撞到目标卫星的喷嘴后,通过重力补偿后,运动控制系统将接触力和力矩信息,以及目标卫星运动信息传递给目标卫星动力学模拟器,目标卫星动力学模拟器将其运动状态通过工业机器人末端对目标卫星的运动学等效,计算得到工业机器人末端的运动状态。最后通过工业机器人T的逆运动学得到其关节伺服运动信息,从而通过工业机器人T的运动实现对目标卫星的运动模拟。
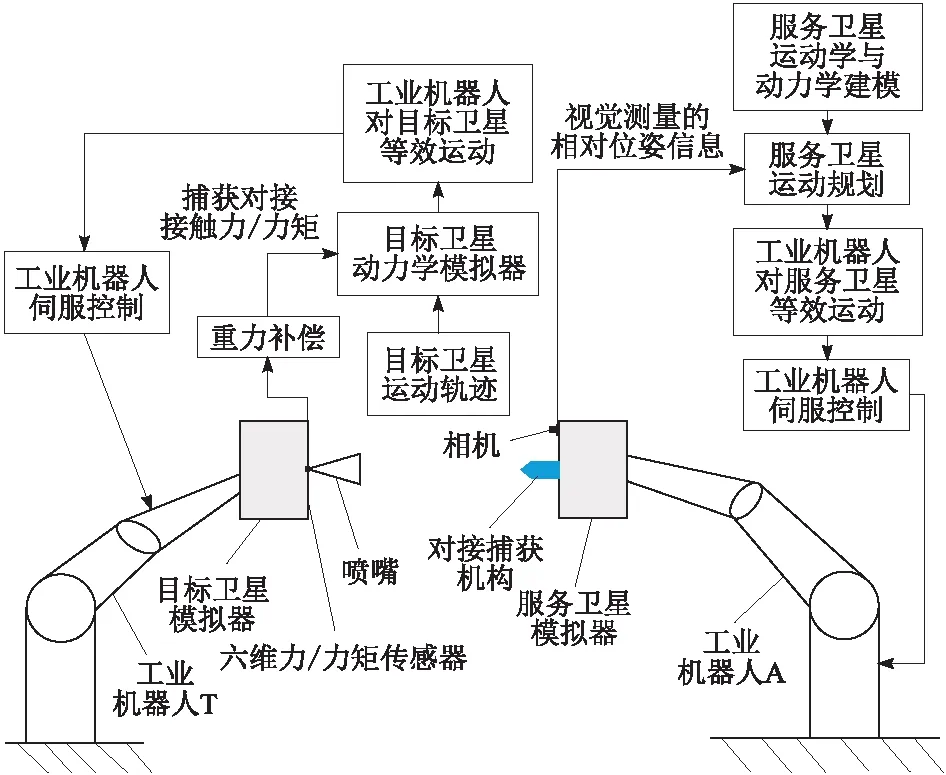
图3 地面微重力验证系统方案
服务卫星的运动模拟是通过工业机器人A的运动来实现的。服务卫星通过视觉相机测量服务卫星的对接捕获机构相对于目标卫星的火箭发动机喷嘴的位姿信息,将相机测量的相对位姿信息通过服务卫星的运动学规划和动力学模拟计算,得到服务卫星的运动信息。同样,通过运动学等效实现工业机器人A末端对服务卫星的运动模拟,得到工业机器人A末端的运动状态。通过工业机器人A的逆运动学得到其关节伺服运动信息,从而通过工业机器人A的运动实现对服务卫星的运动模拟。
3 坐标系转换及运动学等效
在地面微重力验证系统中,非常关键的一步是将两卫星在太空中的运动与工业机器人末端在地面上的运动进行运动学等效。
运动学等效实现的基础,是将卫星在太空的惯性坐标系和地面工业机器人的基坐标系进行坐标系转换。坐标系转换示意如图4所示。

图4 坐标系转换示意
为推导工业机器人基坐标系与服务卫星惯性坐标系的转换关系,设定工业机器人A的末端坐标系与服务卫星对接捕获机构的末端坐标系相重合,则有
OAE=OSE
(3)
OAE为工业机器人A的末端坐标系;OSE为服务卫星对接捕获机构的末端坐标系。
通过式(3)推导出工业机器人基坐标系与服务卫星惯性坐标系的转换矩阵为
OAB=OSI·STTSE·(ABTAE)-1
(4)
OSI为服务卫星的惯性坐标系;OAB为工业机器人A的基坐标系;SITSE为服务卫星从惯性坐标系到对接捕获机构末端坐标系的转换矩阵;ABTAE为工业机器人A从基坐标系到末端坐标系的转换矩阵。
同理,可以获得目标卫星与工业机器人T的坐标系转换关系。
服务卫星与工业机器人A的运动学等效过程如下:首先得到当前服务卫星相关的位姿及运动状态信息,然后通过运动学转换得到对接捕获机构末端在工业机器人末端的等效位姿信息,最后利用工业机器人运动学逆解,得到等效的工业机器人关节角指令,从而实现对工业机器人A的运动控制。即通过运动学等效保证服务卫星和工业机器人A在操作空间的位姿是等同的。
同理,可以实现目标卫星与工业机器人T的运动学等效。
4 卫星对接捕获地面验证系统的建立
为了模拟在太空微重力环境下两卫星对接捕获的接触碰撞过程,搭建了基于硬件在环的卫星对接捕获地面微重力验证系统。该地面微重力模拟验证系统主要由2台六自由度工业机器人、六维力/力矩传感器、目标卫星模型、目标卫星喷管、服务卫星模型、对接捕获机构(对接装置)、卫星动力学模拟器、ABB工业机器人IRC5控制柜和中央控制计算机等组成。
2台6自由度ABB工业机器人的末端分别安装服务卫星模型和目标卫星模型,分别用于模拟服务卫星和目标卫星在太空微重力环境下的三维空间对接捕获过程的运动状况。目标卫星喷嘴连接六维力/力矩传感器安装在目标卫星模型上,对接捕获机构安装在服务卫星模型上,通过对接捕获机构可以实现服务卫星对目标卫星喷嘴的对接捕获操作。动力学模拟器主要用于计算卫星在接触碰撞后的运动状态。ABB工业机器人IRC5控制柜用于实现2台6自由度工业机器人末端的运动控制。中央控制计算机负责整个系统的通信和运动控制。
卫星对接捕获验证系统的中央控制计算机与工业机器人1和工业机器人2的控制器之间,采用TCP/IP通信进行数据和相关信息的传输;同样,与视觉处理计算机、卫星动力学模拟计算机、对接捕获机构控制计算机之间也采用TCP/IP通信。中央控制器与六维力/力矩传感器之间采用PCI总线通信。对接捕获机构计算机与对接捕获机构采用点到点串口通信总线(PPSeCo),如图5所示。
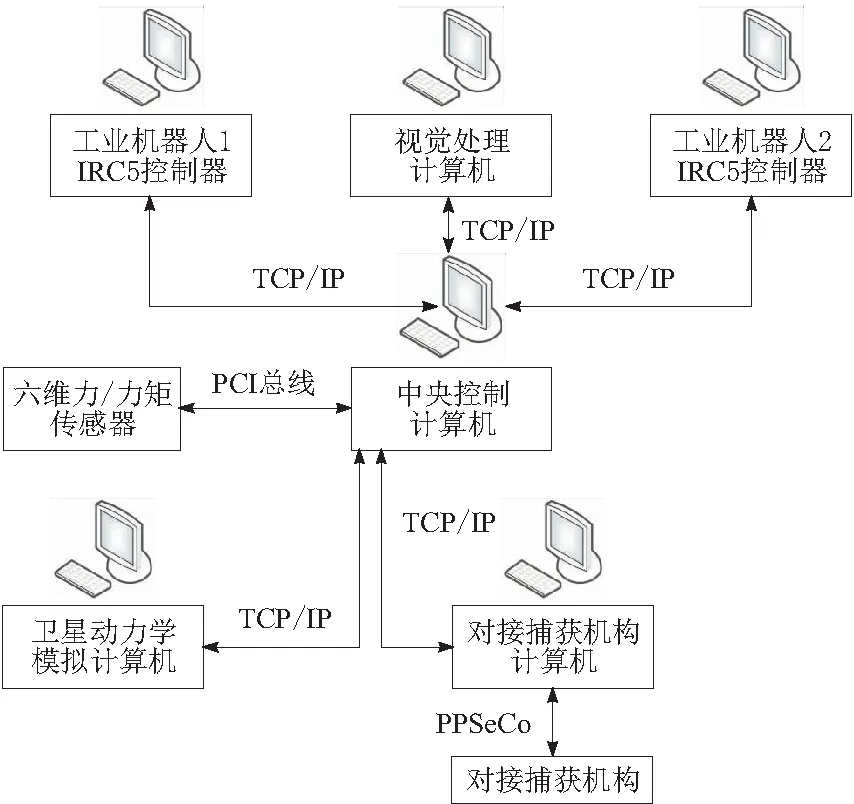
图5 地面微重力验证系统各功能模块间的通信
5 卫星对接捕获地面验证实验
在地面三维微重力验证实验中,六维力/力矩传感器安装在火箭发动机喷嘴与目标卫星模型之间。通过该传感器可以实时测量在两卫星捕获对接过程中的接触力/力矩信息,通过零力控制来实现在太空中微重力环境下,目标卫星与服务卫星在接触碰撞过程中的自由漂浮运动状态模拟。
在对接捕获实验过程中,首先通过视觉相机伺服引导服务卫星模型上的对接捕获机构接近目标卫星模型上的火箭发动机喷嘴机构。
当服务卫星的对接捕获机构和目标卫星的喷嘴接触碰撞后,目标卫星这边的工业机器人T根据六维力/力矩传感器测量的力/力矩信息,通过零力控制来实时调整工业机器人T末端的运动状态。
图6给出了服务卫星模型上的对接捕获机构与目标卫星模型上的喷嘴,在对接捕获过程中的接触力/力矩信息。图6中,Fx、Fy和Fz分别为两卫星对接捕获在x、y、z3个方向测量的实际接触力;Tx、Ty和Tz分别为绕x轴、y轴和z轴测量的实际接触力矩。由图6中可以看出,在接触碰撞最剧烈的情况下,碰撞的接触力基本上保持控制在±20 N之内,接触力矩基本上保持控制在±100 N·m之内,在后期对接捕获完成后,接触力/力矩基本都接近0。这说明在服务卫星在对接或捕获目标卫星过程中,碰撞的接触力/力矩是可控的。服务卫星可以成功地实现在太空微重力环境下对自由漂浮目标卫星的对接捕获操作。
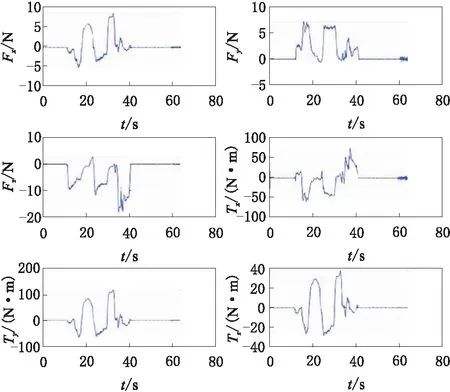
图6 两卫星对接捕获的接触力/力矩
服务卫星和目标卫星的对接捕获地面微重力验证实验如图7所示。通过该地面验证系统,在图7a中模拟再现了两卫星在轨对接捕获前的初始状态,在图7b中模拟再现了两卫星对接捕获后的最终状态。
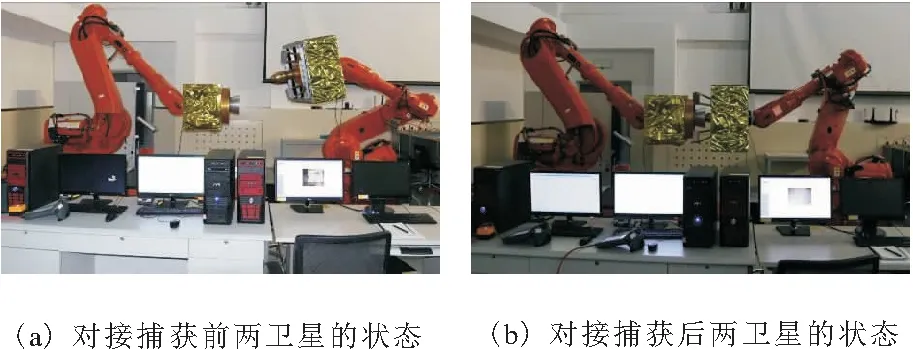
图7 卫星对接的地面验证实验
6 结束语
本文研制开发了一套在太空中两卫星对接捕获操作的地面微重力验证实验系统。在该系统中,2个地面固定基座工业机器人采用运动学等效和动力学模拟的方法,来分别模拟服务卫星和目标卫星在太空微重力环境下的运动状况。该系统可以验证两卫星在对接捕获过程中的接触碰撞情况以及运动状态。通过地面微重力验证系统的实验结果,说明了服务卫星可以成功地在轨对接捕获目标卫星。
