高机动性变压器内部检测机器人控制系统设计与算法研究
2020-12-24郭玉嘉杜向党陈宏博汪旭海靳宪文
郭玉嘉,杜向党,陈宏博,汪旭海,靳宪文
(1.西北工业大学,陕西 西安 710072;2.山东电力设备有限公司,山东 济南 250024)
0 引言
目前,国内许多电力系统采用油浸式变压器,为保障供电安全,需要定期检查内部是否生锈,接线是否脱落,绝缘套管是否老化等[1]。常规检查大多采用排空绝缘油,人员进入检查的方式,存在人身安全风险高、检测效率低、绝缘油浪费和经济性差的缺点[2]。本文设计了一种具有高机动性的水下机器人(又称水下航行器,unmanned underwater vehicle,简称UUV),并携带摄像装置代替人工进行检测,实时采集、上传所调查区域的图像信息,可以克服人工检测的缺点。
1 UUV总体设计
1.1 需求分析
变压器箱体本身尺寸有限,内部空间狭小,结构复杂多变,存在窄道以及铁芯柱、铁轭等障碍物。为了灵活避开各种障碍物,UUV结构必须小巧、紧凑。为了能够采集到变压器内部各处的图像,UUV本身必须具有高机动性,要求控制系统必须可以准确调控UUV的姿态。
1.2 UUV方案设计
1.2.1 布局与结构设计
UUV总体布局如图1所示。为了减小外形尺寸,增加空间利用率,UUV采用了圆柱体外形,外形尺寸直径为224 mm,高为300 mm,结构小巧紧凑,采用保形设计,外缘无凸起,便于穿过变压器内部的窄道[3]。

图1 UUV总体布局
1.2.2 动力系统设计
为了实现高机动性,UUV在水平面内的运动采用矢量推进方式[4]。如图2所示,水平推进系统由偏心布置的4个推进器组成,根据动作需求,相应地控制T1、T2、T3、T44个推进器的转速,产生矢量推力或力矩,使UUV实现前进、后退、侧移或定心旋转运动。当推进器1正向转动、推进器2反向转动且转速相同时,其推力产生的合力矩使得UUV做原地顺时针旋转运动,合力矩为Mn1。同理,UUV做原地逆时针旋转运动时合力矩为Mn2。
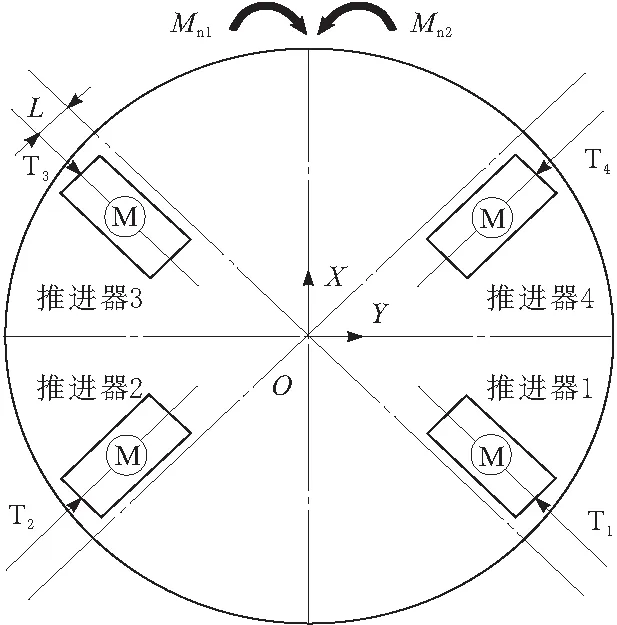
图2 水平推进系统原理
在垂直方向,采用活塞式浮力调节机构产生上浮或下潜运动的驱动力。如图3所示,步进电机通过齿轮副将驱动力传递至滚珠丝杠轴上,带动活塞运动,通过调节活塞位置改变排水量从而改变UUV的浮力,使其产生垂直方向的浮沉运动[5]。

图3 浮力调节装置三维模型
将电机和滚珠丝杠轴并列布置,使UUV结构紧凑,布局合理,体积小巧。通过装在步进电机上的编码器解算活塞位置,实现对浮力的精确调节。
2 UUV控制系统设计
2.1 功能分析
根据UUV的功能需求,要求控制系统具备以下功能:
a.任务功能。需要实时采集变压器内部高质量视频或者照片,并实时回传画面供变压器检修人员观察。
b.导航定位功能。控制UUV航向、深度与姿态,并结合视频实现UUV的实时定位。
c.通信功能。实现岸基上位机和UUV的通信,使UUV能够实时接收到来自岸基的控制指令,并上传自身的状态信息和所拍摄的画面[6]。
d.运动控制功能。控制UUV实现上浮下潜、悬停、前进后退和侧移等运动,实现UUV的高精度控制。
2.2 方案设计
UUV控制系统组成如图4所示,主要由上位机、通信模块、下位机、任务模块、导航定位模块和运动控制模块组成。
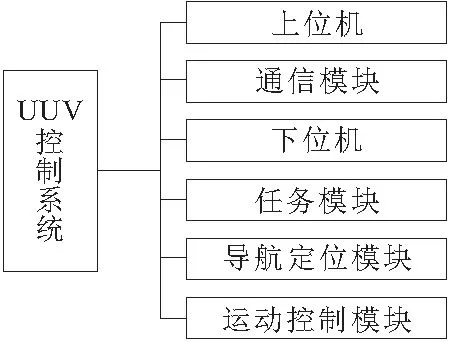
图4 UUV控制系统组成
上位机是操作人员直接交互的对象,布置在岸基上;上位机通过通信模块向下位机下达指令,使UUV完成相应动作。同时,下位机也通过通信模块反馈UUV的位置、姿态等信息。
UUV的任务模块的核心功能为摄像功能,摄像头将拍摄到的视频图像信息经通信模块反馈给上位机。
导航定位模块实现UUV的姿态与深度信息的采集,解算出UUV的深度与姿态[7]。
运动控制模块根据姿态信息与控制指令驱动水平推进系统,实现UUV在水平面内位置和航向角的精确控制;根据深度传感器反馈的深度信息,采用合理的控制算法,驱动浮力调节系统,可实现高精度的深度控制,进而实现定点的图像采集。
2.3 设计实现
UUV控制系统结构如图5所示,包括安装在岸基的上位机部分和安装在UUV内的控制执行部分。
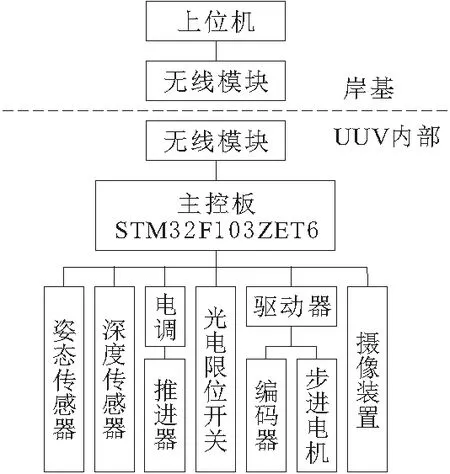
图5 UUV控制系统结构
2.4 上位机设计
UUV的上位机选用PC,上位机软件使用LabVIEW软件编写。通过该软件界面向下位机发送控制指令,能够在屏幕上显示下位机反馈的传感器数据、UUV的运动状态以及视频画面。
2.5 下位机设计
本文设计的UUV的下位机主控板采用STM32F103ZET6芯片型号的单片机,开发环境为Keil uVision5。
STM32单片机通过Wireless接口连接无线模块,PC机外接无线串口模块。推进器采用PWM调速的无刷直流电机,所以需配置无刷电调。浮力调节装置的电机采用步进电机。丝杠与活塞行程有限,为防止行程超限,需加入光电限位开关。深度信息由深度传感器采集,姿态信息由姿态传感器采集。
主控板可以接收并解读上位机发送的运动指令,或向上位机反馈UUV的状态信息。接收指令后可以驱动水平和垂直推进系统的推进器或电机转动,进而使UUV完成相应动作。
3 控制算法与仿真
在已有的控制算法中,经典的PID控制算法因其易于工程化被广泛应用于水下航行器领域。滑模变结构控制具有较强的鲁棒性,即使系统的模型不精确或受到未知外界干扰也可有效应对[8]。本文分别研究了PID控制算法和滑模变结构控制算法下航向角角度、角速度与垂直方向速度、活塞位置的变化情况;根据仿真结果,选用了滑模控制,克服了非线性系统难以控制的缺点[9]。
3.1 基于控制输入抗饱和的滑模模型
UUV在水平或垂直方向上运动时,推进器或浮力调节装置所能提供的推力和浮力的调节值有限,可能达不到算法需要的调节值。这一控制输入受限问题在某种程度上会影响到UUV控制系统的稳定性,因此针对该“控制输入饱和”问题,设计了基于控制输入抗饱和的滑模控制器。
通过定义辅助分析系统,采用输入饱和误差动态放大的方法,可实现基于控制输入抗饱和的滑模控制,闭环控制系统示意如图6所示。

图6 基于控制输入受限的闭环控制系统
通过设计一个稳定的自适应辅助系统,可实现控制饱和的补偿。该自适应辅助系统为
(1)
Δu=ut-v,ut为受限的控制量,即图6中u,v为受限前的控制量,且ut=satv,satv为控制输入饱和函数;c1、c2分别为系数。
设计控制器为
c2λ2-ηsgns]
(2)
Xd为目标指令信号;η为切换项增益,闭环系统是有效且稳定的;x2=f(x,t)+but+dt,其中b≠0,dt为未知干扰。
当模型不确定性和干扰较大时,η较大,会产生较大的抖振。为了避免抖振,滑模控制器中采用饱和函数sats代替符号函数sgns。
则可变为
c2λ2-ηsats]
(3)
3.2 水平运动控制算法研究
3.2.1 水平运动控制系统
该UUV的水平控制系统如图7所示。

图7 水平控制系统
水平控制器输出水平运动所需要的转矩,并分配到相应的推进器;由于各推进器间的推力差值不能过大,因此对推进器的转速进行限速,即对推力和相应的力矩进行限幅。
3.2.2 水平运动控制算法
水平运动方程为
(4)
ρ为水的密度;Iz为Z轴的转动惯量;r为沿Z轴转动的角速度;Nr为沿Z轴转动的力矩;TN为Z坐标轴上的推力矩;Sr为UUV的Z轴方向特征面积。
由式(3)可得出UUV的水平运动滑模控制器为
(5)
3.2.3 水平运动仿真分析
在MATLAB中,搭建水平运动仿真程序。水平控制器输出的转矩的值分配到相应的推进器,使其产生相应的推力以进行水平运动[10]。
2种控制器作用下UUV的航向角角度、航向角角速度变化曲线,分别如图8和图9所示。

图8 航向角角度变化曲线

图9 航向角角速度变化曲线
由图8和图9可知,UUV从0转动到0.5 rad这一过程中,PID控制器的响应速度比基于控制输入抗饱和的滑模控制器的响应速度慢,且PID控制器存在超调现象,使UUV在目标角度附近持续震荡。根据上述UUV水平运动的仿真案例可知,在对水平运动进行控制时,基于控制输入抗饱和的滑模控制器优于PID控制器。
3.3 垂直运动控制方法研究
3.3.1 垂直运动控制系统
该UUV的深度控制系统如图10所示。

图10 深度控制系统
3.3.2 垂直运动控制算法
垂直运动方程为
(6)

由式(3)可得UUV的垂直运动滑模控制器为
(7)
3.3.3 垂直运动仿真分析
在试验条件下,UUV通常配平至正浮力状态,浮力和重力差值在0.05 N以内,所以当UUV完成深度调节后,要实现深度悬停需不断调节活塞位置。因此在该仿真案例中,当UUV完成深度调节后,向控制系统添加持续干扰以表示重浮力差值,使仿真模型更接近真实条件,干扰大小为 Δf=0.05×sint。为了体现基于控制输入抗饱和的滑模控制器的鲁棒性,将其与经典的PID控制器进行对比。
本仿真案例中UUV在垂直运动过程中,垂直方向初始速度为0,初始深度为0,期望深度值为1 m。PID控制器和基于控制输入抗饱和的滑模控制器参数分别设置为:PID控制器的参数为KP=3,KI=0.001,KD=20;基于控制输入抗饱和的滑模控制器参数为c=0.28,c1=c2=0.35,η=D+0.1,D=0.1。
受持续干扰时,2种控制器作用下UUV的深度、垂直方向速度和活塞位置变化曲线分别如图11~图13所示。
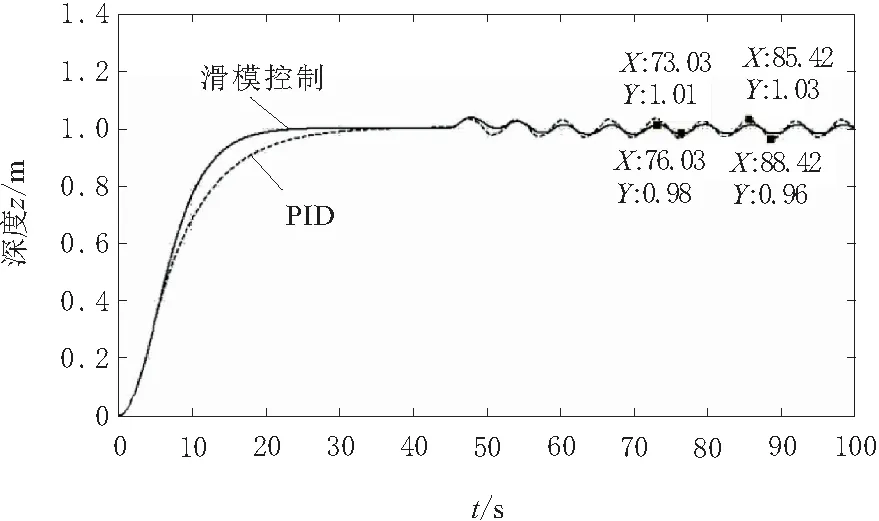
图11 持续干扰下UUV的深度变化曲线

图12 持续干扰下UUV的垂直方向速度变化曲线

图13 持续干扰下UUV的活塞位置变化曲线
2种控制器下深度变化曲线如图11所示。当有持续干扰作用时,PID控制器作用下的UUV深度波动范围为0.961~1.030 m,不满足垂直方向悬停精度30 mm的技术要求。而基于控制输入抗饱和的滑模控制器作用下,UUV深度波动范围为0.980~1.010 m,满足要求。垂直方向速度变化曲线如图12所示,PID控制器作用下的UUV速度波动范围为-0.033~0.031 m/s,而滑模控制器作用下的UUV速度波动范围为-0.019~0.019 m/s,速度波动范围明显小于PID控制器。活塞位置变化曲线如图13所示,滑模控制器作用下的UUV活塞位置变化相对PID控制器作用下的更平滑。
基于上述UUV垂直方向运动的仿真案例,在持续干扰作用下,基于控制输入抗饱和的滑模控制器的鲁棒性优于PID控制器,可同时实现UUV的深度调节和悬停控制。
4 原理样机试验研究
根据上述设计方案,研制了UUV原理样机,并进行了水池试验,对其运动性能进行了测试分析。
4.1 水平混合运动试验
水平混合运动试验时,根据下水初始位置航向,设定初始航向角为-115°,15 s后,航向角设定为45°,航行过程中,姿态传感器记录航向数据。
UUV通过改变推进器1和推进器2的转速,控制UUV沿航向角为-115°的直线航行。15 s后,推进器1和推进器2停止工作,在推进器3和推进器4开始工作,UUV减速停止(推进器位置见图2),做逆时针旋转运动,沿航向角45°直线航行行驶一段时间后减速停止。
混合运动的航向角记录曲线如图14所示。航向角分别在-110.5~-124.3°和34.4~42.5°之间浮动,说明航向角控制精度约在13.8°以内。
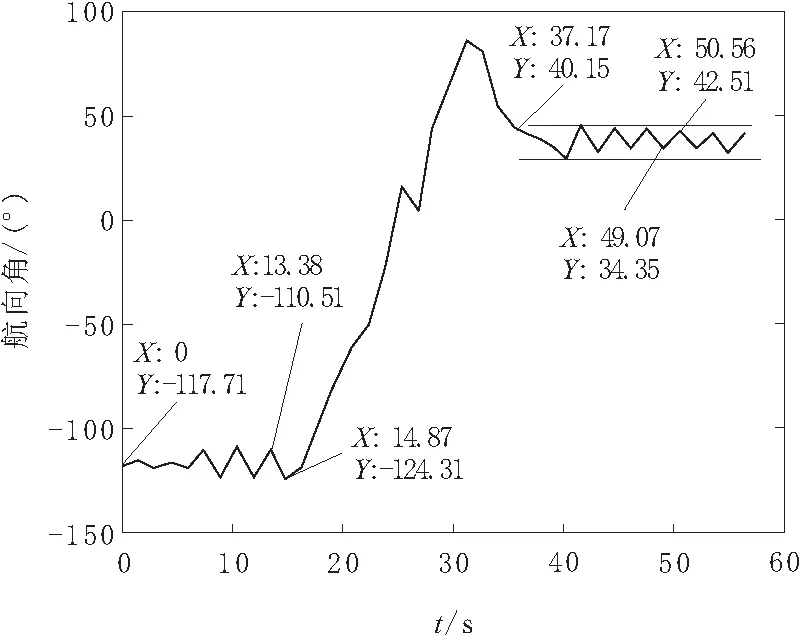
图14 混合运动试验航向角曲线
4.2 悬停运动试验
对UUV的悬停功能进行了测试,UUV先下潜,到达目标深度后悬停一段时间,再做上浮运动。测试时,悬停深度设为200 mm,UUV下潜运动时先加速后减速,悬停控制深度为200 mm,深度传感器记录的深度曲线如图15所示。根据压力曲线在15~25 s时间内变化的情况,可以估算悬停精度控制在30 mm以内。

图15 垂直运动试验深度变化曲线
5 结束语
本文对油浸式变压器内部检测UUV的控制系统与算法进行了理论分析与设计,通过软件仿真对比得到合理算法,水池试验验证了理论分析结果。不足之处是由于试验条件限制,未能对悬停控制精度进行充分测试分析,并对相应控制参数进行优化。
