混合现实技术引导的经皮内窥镜下腰椎椎间盘切除术的初步探索与应用
2020-12-24周建伟虞攀峰唐家广
周建伟,李 矛,迟 成,虞攀峰,王 飞,唐家广
首都医科大学附属北京同仁医院脊柱外科,北京 100730
经皮内窥镜下腰椎椎间盘切除术(PELD)已经成为治疗腰椎椎间盘突出症(LDH)的首选方法[1-3]。腰椎椎间盘突出类型多样化,术前须精确定位突出椎间盘的“靶点”位置,确定进针点、深度和角度等相关参数,以便术中可按照术前设计快速准确地穿刺和置入工作通道,这是靶向穿刺技术的核心,也是尽可能减少不必要创伤并发症的基础[4]。常规手术通道的建立,需要根据椎间盘突出的不同病理类型并结合临床实践确定,且术中需要C形臂X线机透视辅助,存在学习曲线陡峭、辐射量大、手术风险高等问题[5-6]。混合现实(MR)技术是近年发展起来的一门新兴技术,其将虚拟现实(VR)技术与增强现实(AR)技术相结合,操作者可从MR技术呈现的全息影像中获取相关信息,从而实现虚拟和真实的交互[7-8]。目前,MR技术在复杂的脑外科手术、髋关节手术中已有应用,并获得良好的临床疗效[9-11],但尚无其应用于PELD的报道。本研究组在MR技术引导下,对1例LDH患者行PELD,取得了良好的临床疗效,现报告如下。
1 资料和方法
1.1 病例资料
患者,女,37岁,2020年1月1日因“腰痛伴左下肢疼痛、麻木1年,加重3 d”入院。体格检查:轮椅推入病房,左小腿后侧和足底感觉减退,叩击腰骶部疼痛加剧,并可诱发左侧臀部及大小腿后侧放射痛;双下肢肌力5级,左下肢直腿抬高试验阳性(30°),加强试验阳性;腰痛视觉模拟量表(VAS)评分4分,左下肢痛VAS评分7分。既往无外伤、手术史。
1.2 术前三维模型重建
术前患者取俯卧位,完善腰椎正侧位、过伸过屈位X线检查及L1~ S3CT、MRI检查(图1)。将CT数据以dicom格式导入Materialise Mimics三维重构软件系统(21.0版,北京仁馨医疗科技有限公司),对目标区域内的骨骼、硬膜囊、椎间盘、神经和皮肤等组织采用不同的颜色进行区分,使用多个不同分割算法进行可视化边缘检测、分割提取,测量、计算生成三维重建模型(图2)。不同的软组织采用图像分割多阈值分割算法计算,通过在同一窗口显示多幅分割效果图、或将多幅效果图合并成一幅伪彩色图像,利用像素值提取“感兴趣部位”,比较不同阈值的效果,从而确定合适的阈值[12]。将通过三维精准超渲染可视化技术得到的三维重建模型用特殊软件与算法进行定位、渲染、物理参数调整及模型功能设定,进行高维态显示处理,再把模型载入全息影像眼镜中。术者观察MR技术所呈现的全息影像,可立体、空间、直观及多角度观察,也可进行放大、缩小、旋转及拖动等有利于观察的操作。临床医师与患者通过该技术可进行多平面切换观察,加深对二维影像平面结构的空间理解,术前可标记和模拟术中穿刺的安全路径。
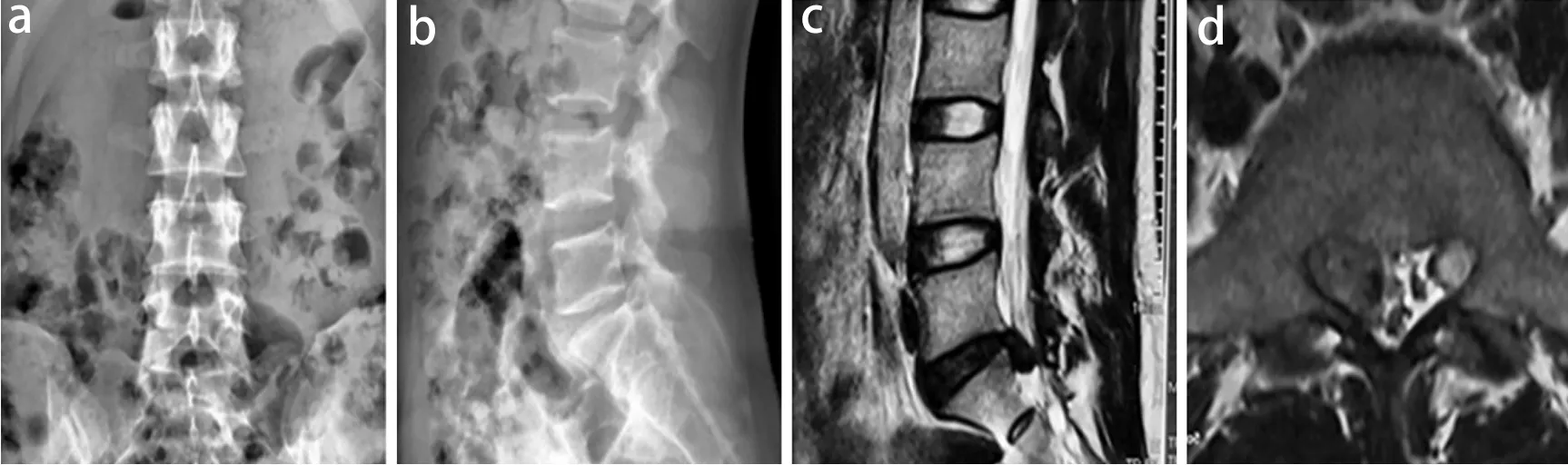
图1 术前影像学资料

图2 三维模型重建
1.3 手术方式及术后处理
手术采用局部麻醉,患者取俯卧位,胸部和髋部垫高,腹部悬空,常规消毒、铺巾。患者体位固定后,通过光学视觉系统把三维重建模型与患者脊柱进行匹配,并赋予坐标空间,形成MR的空间效果,然后在MR技术引导下行PELD(图3)。术中依据定位将三维影像数据投射到L5/S1周围,术者佩戴全息影像眼镜(Hololens2,Microsoft公司),参考虚拟影像位置进行穿刺。全息影像眼镜具有4部光学摄像机和2部红外摄像机,可以实时多方位采集影像,反馈给处理系统,处理器采用高通骁龙850计算平台,能实时生成2K高清图像,保证术者在虚拟模型和真实世界无缝对接。此外,全息影像眼镜实现了手动追踪、眼动追踪及语音控制,能自动和术者手眼对接,术者适应后可轻松操作,保证了术者意图实施的准确性。
本例术中将穿刺针尖和皮肤穿刺点相吻合,沿预设路径穿刺。穿刺过程中,术者通过全息影像眼镜将虚拟和现实合为一体,无需透视引导(图3a ~ c)。穿刺至L5/S1椎板间隙黄韧带表面后,C形臂X线机透视验证确保MR技术和真实场景模拟准确,穿刺位置准确(图3d),之后在皮肤上做约1 cm长的切口,软组织扩张后放入外工作套管连接内窥镜(直径4.3 mm,Wolf,德国),全程内窥镜下直视操作,用枪钳和咬断钳将黄韧带切开3 ~ 5 mm,在椎管内神经外侧隐窝方向用高速磨钻将椎板间隙扩大,枪钳和咬断钳去除间隙内的黄韧带,找到突出的髓核组织并摘除,用射频将纤维环成形,最后探查确认患者神经根活动良好、无活动性出血后,撤出工作管道和内窥镜系统,缝合伤口。
术后患者平卧2 h,在软腰围保护下逐渐下床活动,术后第2天出院,出院后口服非甾体类抗炎药物3 d。术后2周门诊随访,去除腰围,同时指导患者开始行腰背部肌肉力量锻炼。
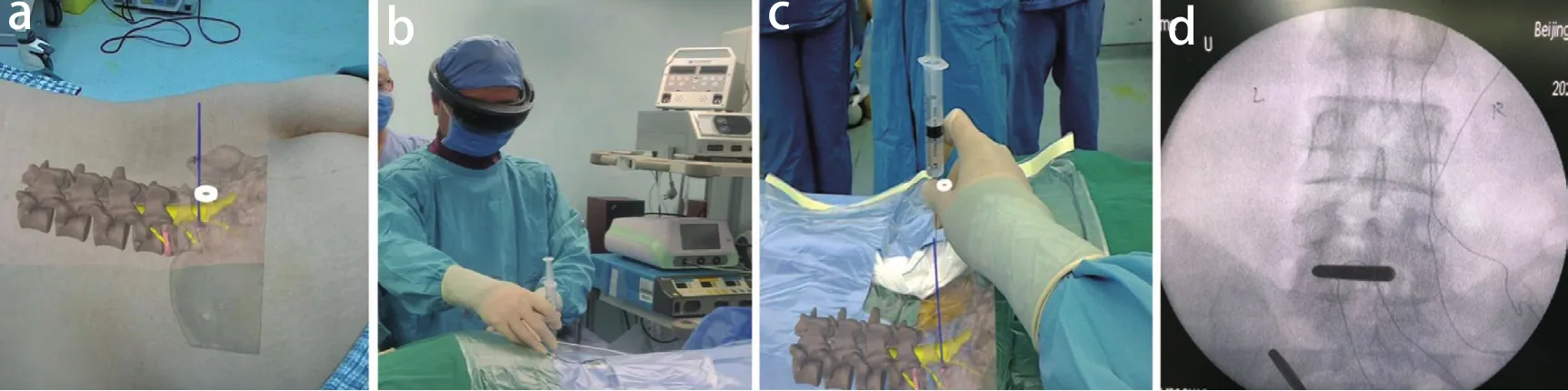
图3 MR技术引导下PELD
2 结 果
手术顺利完成,手术时间约30 min,术中出血量≤10 mL。患者术后腰痛伴左下肢疼痛较术前明显改善,术后腰痛VAS评分2分,左下肢痛VAS评分1分,左小腿后侧和足底麻木较术前改善。卧床休息3 h后佩戴腰围下床活动,腰痛及左下肢痛无明显加重。出院后定期随访。
3 讨 论
随着信息技术在医疗领域的深入研究和广泛应用,新的信息技术,如MR技术,在外科手术中的应用迅速发展[13]。MR技术在手术中的应用关键是将术中的真实组织和术前图像数据进行相互匹配与融合,实现实时三维视觉定位和手术导航[14-16]。MR技术具有实时交互性和精确匹配性等优点,已成为信息技术在医疗领域的发展前沿。复杂的人工全髋关节置换术及骨盆/髋臼骨折,可利用MR技术进行个体化手术设计,术中与患者实际情况进行重叠交互,在直视下手术,大大提高了手术成功率[11,17]。此外,神经外科手术对精准程度要求高,MR技术能够较好地重建三维图像,与现实环境深度整合,能显著缩短手术时间、提高定位准确性和手术安全性[9,18-19]。陆续有文献报道MR技术应用于经皮肾镜手术、胸腔镜手术中[20-22],均获得了较好的早期临床疗效。随着脊柱内窥镜技术的进步,PELD已经成为治疗LDH的首选方案[1-3,5],与此同时,相关并发症的报道也越来越多,特别是神经损伤等严重并发症[4]。术前通过影像学资料确定病变“靶点”位置,设计手术路径,确保术中按照设计方案实施手术,做到“个性化”和“精准”,是脊柱内窥镜手术成功的关键[5]。
传统PELD术中采用C形臂X线机透视定位穿刺,依据透视结果或医师个人经验,逐步调整穿刺针位置直至目标靶点。术中调整过程需要反复多次透视、穿刺。由于患者个体差异及病变“靶点”位置不同、病变类型多样,对术者的空间思维能力和手术经验提出了较高的要求。因此,PELD的学习曲线较为陡峭,初学者往往因缺乏良好的空间想象能力、临床穿刺操作经验,以及对脊柱解剖结构的不熟悉、对体表标志的触觉反馈不敏感,导致定位穿刺困难。初学者手术操作时间延长、反复多次透视和穿刺增加患者痛苦及医患双方的辐射暴露,增加硬膜囊及神经根损伤风险[23-24]。MR技术通过术前收集患者影像学资料,利用信息技术重建脊柱、椎间盘、神经等重要组织结构并以三维虚拟模型的形式呈现出来,术者佩戴全息影像眼镜可通过光学视觉系统将三维模型与现实相结合,并赋予坐标空间,形成MR的空间效果。在MR技术引导下进行手术操作,可保证对病变“靶点”部位进行精准处理,还可从不同角度对突出的椎间盘组织、神经、硬膜囊及周围骨性组织的位置关系进行观察,从而提高操作的准确率,降低手术风险。由于是基于MR技术引导的穿刺,术中仅需要在置管完成后采用C形臂X线机透视验证1次,减少了患者的痛苦和医患双方的辐射暴露剂量,也缩短了手术时间。
三维虚拟模型与术前、术中真实空间的匹配精确度提升是MR技术在脊柱内窥镜手术应用进一步发展的重点和难点。匹配精准度的影响因素:①术前CT数据采集体位和术中体位不同引起的误差。不同体位下,神经根、硬膜囊、髓核的位置可能会有变化,采集CT数据时患者应尽可能保持俯卧位(拟采用椎板间入路手术的患者)或侧卧位(拟采用侧方入路手术的患者),减少体位对三维重建模型的影响。②工程师将虚拟数据和真实数据整合时人为操作引起的误差。目前整合数据仍需要人为操作,可能引起一定范围的误差;可在患者体表设定标志点(至少3个),工程师采用计算机软件结合标志点进行虚拟数据和真实数据的整合,以减少人为操作误差。③术者实际操作和虚拟路径之间的误差。术者操作过程中可能不能完全吻合术前拟定的路径,从而引起误差,可考虑采用配备具有力反馈功能的操作杆,当术者操作偏离虚拟路径时可实时提醒术者进行调整。
MR技术还可用于术前医师与患者沟通,帮助患者更加形象地了解手术过程,消除患者及家属的焦虑和疑惑,减少医患矛盾和医疗纠纷发生的可能。目前,本研究组仅对MR技术在PELD中的应用进行了初步探索和尝试,认为MR技术辅助PELD具有个体化设计和精准手术的优点,安全、有效,在脊柱微创技术的个性化治疗中具有良好的发展潜力,未来还须增加样本量和进一步随访来验证和推广。