固体火箭发动机水下工作推力特性的实验研究
2020-12-24佘湖清
张 磊,佘湖清
(中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003)
1 引言
固体火箭发动机具有机动性强、隐蔽性好、可靠性高等优势,因此其用于主动攻击水雷、鱼雷、潜射导弹等水下高速攻击武器的主要推进动力[1]。固体火箭发动机在水下工作时,由于喷管外部环境水密度远大于空气,且超音速的高温高压燃气与周围水剧烈相互作用形成含有激波、相变、漩涡等复杂物理过程的不稳定流动现象,从而导致发动机推力性能难以预估[2-3]。因此深入研究不同水深工况下固体火箭发动机推力特性及复杂两相流动机理,对水下火箭动力发展具有重要意义。
针对固体火箭发动机水下工作过程及流场特性,国内外学者进行了大量研究。王宝寿等[4]通过压力水筒的推力矢量试车台,测量了水深为10~40 m 条件下火箭发动机水下点火工作时的推力和侧向力,研究了不同推力矢量控制方式下的发动机工作特性。贾有军等[5]利用水下点火试车试验系统对试验发动机尾流的形貌及其演化过程进行了试验研究。汤龙生等[6]通过有限水域环境试验研究了水下燃气射流气泡的生长过程、压力波传递及衰减特性。施红辉等[7-8]进行了三维水下超声速冷喷气体射流的可视化试验研究,分析了射流形成后气液界面的不稳定过程以及由此引起的射流胀鼓与回击等流动振荡现象。张春等[9]在压力水筒中开展固体火箭发动机水下点火实验,并基于流体体积函数(VOF)模型对燃气与水相互作用过程进行了数值求解,着重分析了水下超声速燃气射流发展初期的燃气泡形态及流场变化规律。王利利等[10]采用计算流体力学方法对固体火箭发动机水下超声速射流的流场及推力演化过程进行数值仿真,对比分析了两种扩张比喷管的流场结构与推力变化。唐云龙等[11-12]建立了水下发动机轴对称模型,将射流典型结构与推力曲线时刻进行对照分析,并探究了发动机工作初期推力峰值的影响因素。张帅[2]基于VOF 界面追踪方法建立了发动机水下燃气超声速射流模型,研究了不同工作水深和喷管膨胀比对水下发动机工作性能的影响。
综上所述,关于水下固体火箭发动机的数值仿真大部分只重点研究了水下燃气泡形态及流场变化规律,且与实际复杂过程有一定差别。对实验研究仅在有限水域模拟试验环境的容器中进行,由于实验条件和成本的限制,关于真实水环境中发动机推力特性研究未见公开报道。为此,本研究利用连接船体的升降平台,在湖上开阔水域不同水深开展固体火箭发动机水下点火实验研究,讨论了发动机工作时水下燃气射流流场特性以及不同水深(10,30,50 m)环境对发动机推力的影响,并分析了不同装药发动机在水下工作的推力变化规律。
2 实验系统及测试方法
实验系统在水下的总体布置如图1 所示,主要包括试验发动机、连接船体升降平台、操作控制系统、数据测量采集系统。
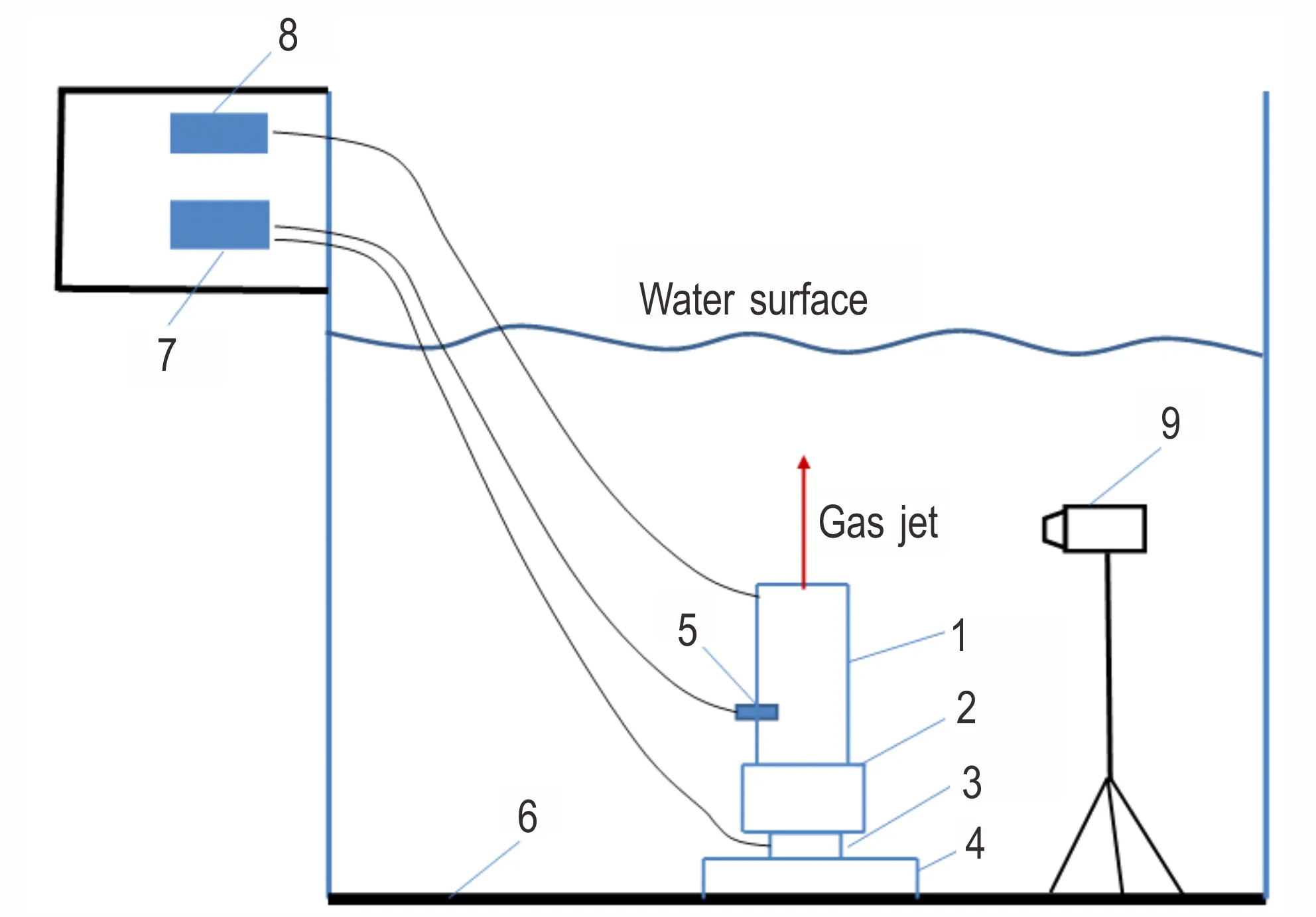
图1 水下火箭发动机实验系统布局示意图1—火箭发动机,2—推力架,3—推力传感器,4—底座,5—压力传感器,6—升降平台,7—数据采集系统,8—稳压电源,9—高速摄像机Fig.1 Schematic diagram of the layout of underwater rocket engine experimental system1—rocket engine,2—thrust stand,3—thrust sensor,4—base,5—pressure sensor,6—lifting platform,7—data collection system,8—power supply,9—high speed camera
实验发动机主要由前端盖、燃烧室、推进剂、挡药架、喷管、后端盖等组成,如图2 所示。采用内外孔恒面燃烧的装药结构,实验中有三种不同推进剂装药的发动机,装药参数如表1 所示,对应发动机喷喉直径分别为18,11,18 mm。
连接船体升降平台可以通过船上室内操作控制系统实现0~200 m 水深范围内升降并制动在某一深度。通过操作控制台显示器可以实时监测升降平台升降速度及所处的深度,便于检查试验过程中详细情况。
数据测量采集系统由水下高速摄像机、压力传感器、推力传感器、应变放大器、数据采集仪、计算机等组成,可以实现压力、推力数据及尾流场图像的自动采集。
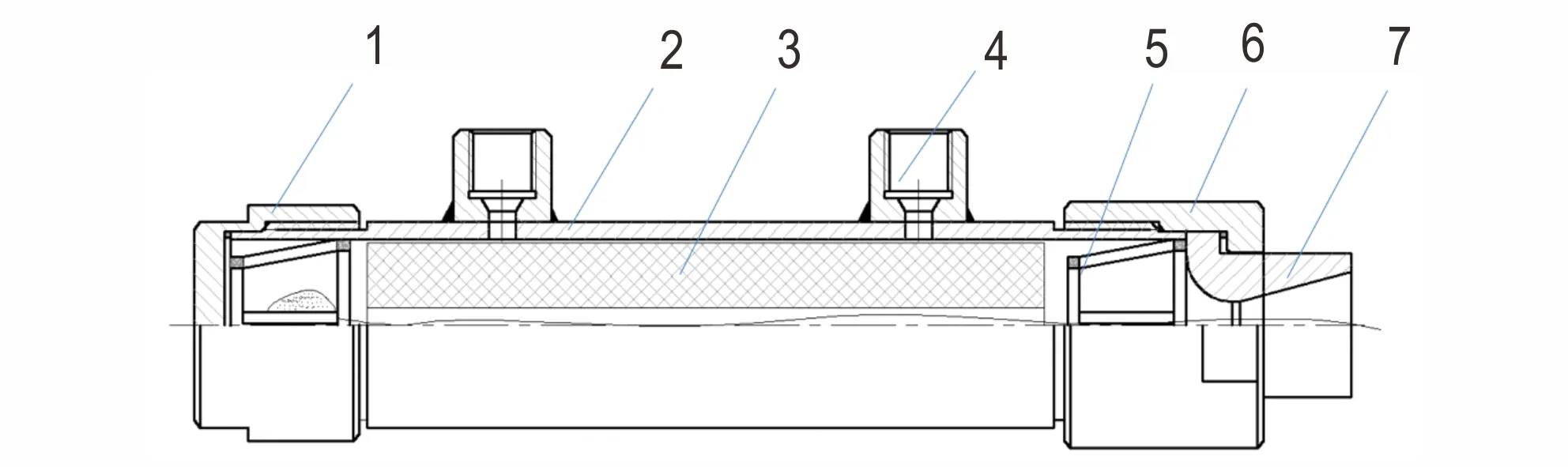
图2 实验发动机示意图1—前端盖,2—燃烧室壳体,3—推进剂,4—测压孔,5—挡药板,6—后端盖,7—喷管Fig.2 Schematic diagram of the experimental engine1—front cover,2—combustion chamber shell,3—propel‑lant,4—pressure hole,5—charge baffle,6—rear cover,7—nozzle
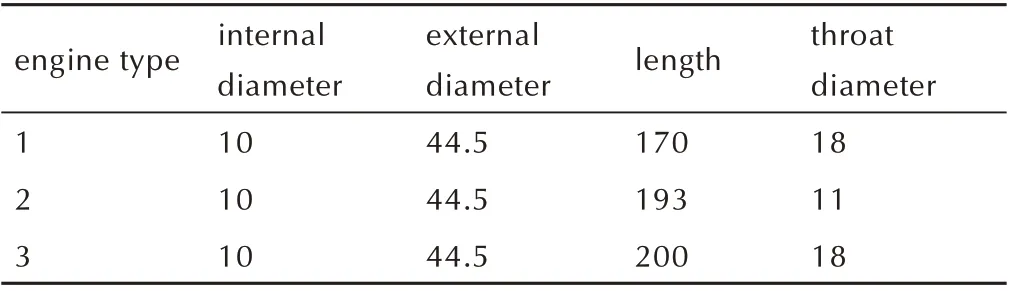
表1 实验发动机的装药参数mmTable 1 The charging parameters of experimental engines mm
实验系统的工作过程为将完成装药的试验发动机安装固定在升降平台上,连接测量线路并进行调试,再连接点火线路并确认电阻正常。然后通过船上操作控制系统将升降平台以5 m·min-1的速度下降到预定的水深,收到电点火信号后,发动机开始工作,燃烧室内迅速产生高温高压燃气,快速聚压冲破密封膜片,超声速燃气与周围水剧烈掺混。数据采集后,将升降平台上升到水面。为了接近火箭发动机实际工作环境,本试验全过程在湖上开阔水域进行。
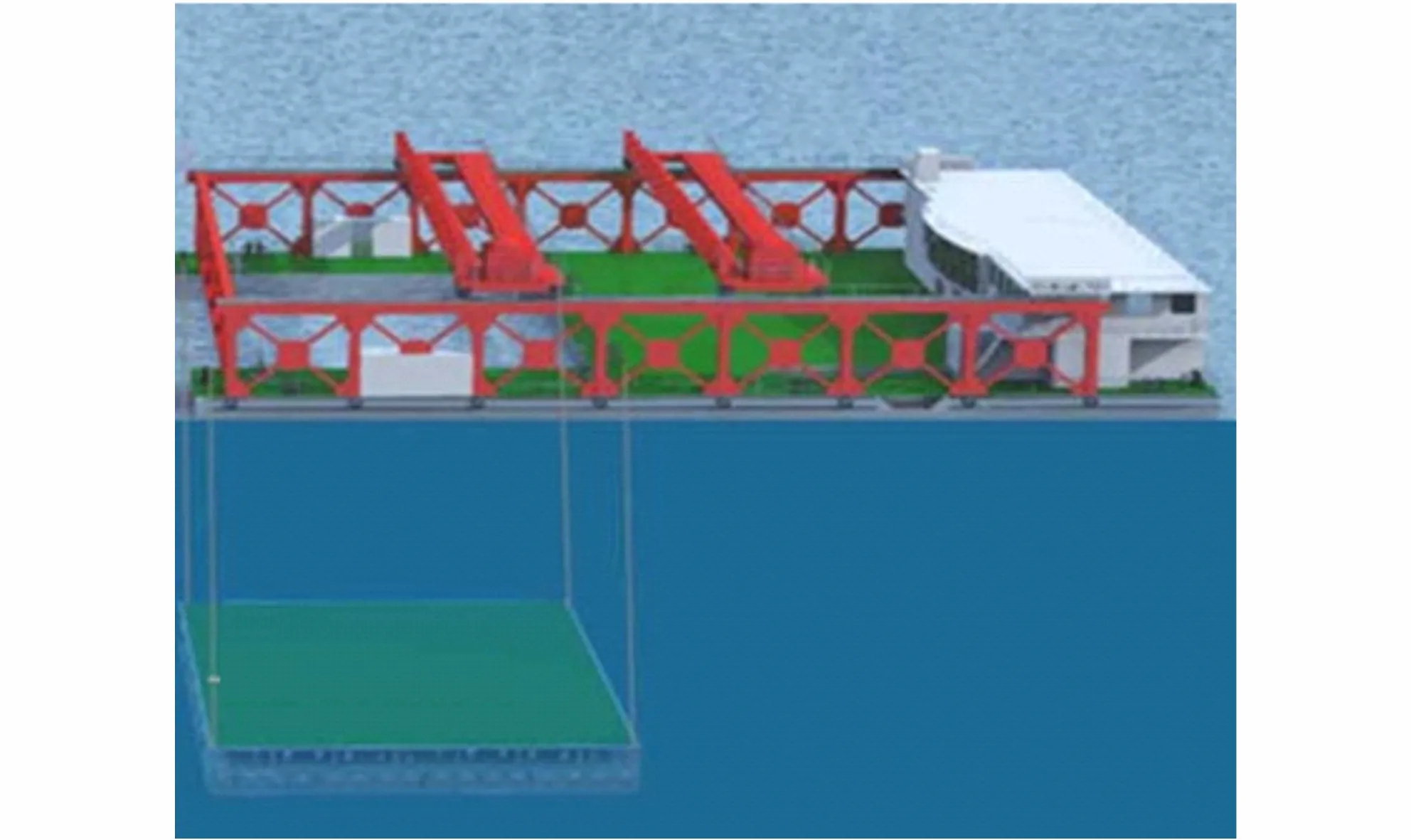
图3 连接船体升降平台示意图Fig.3 Schematic diagram of the lifting platform connected to the hull
3 实验结果与讨论
3.1 水下燃气射流的流动特性
用高速摄像机拍摄试验发动机1 点火瞬间水下燃气射流的形貌及其变化过程,其典型的扩展形态演化过程如图4 所示。点火后生成的燃气受到喷管密封盖的惯性约束作用,燃烧室建压一定程度时,燃气冲破密封盖的约束推动周围水介质,类似于发生水下轻微爆炸。

图4 燃气射流在水环境中扩展形态的演化过程Fig.4 The evolution process for the extended form of gas jet in water environment
由图4 可以看出,密封盖打开后,高速燃气迅速冲击周围水介质,开始形成扁平状的燃气泡。随着燃气连续的喷射,燃气泡头部沿轴向迅速向下游扩展,而尾部径向受水压作用逐渐收缩,发展为椭球体形状,当燃气射流达到稳定状态后,上游演化为细长状,且射流通道内不断出现膨胀‑压缩现象。由于射流过程中燃气与水的速度相差较大,呈现Kelvin‑Helmholtz 不稳定效应[17],导致气液界面脉动剧烈,形成的气液混合层呈“云团”状。由此可见,伴随有传热、相变、激波等复杂的气液相互作用对超声速燃气射流结构产生较大影响并消耗部分能量,会造成水下发动机推力损失。
3.2 不同水深对发动机推力的影响
实验发动机1 在水深分别为10,30,50 m 条件下工作时,测得的燃烧室压强如图5 所示。从图5 可以看出,发动机点火后燃烧室压强迅速增大,瞬间出现压强峰值,主要是由于喷管密封盖打开后受到高密度水环境的阻滞作用。燃烧室压强随水深变化影响较小,平衡压强约为6.5 MPa,发动机工作时间也基本相同,说明试验发动机内推进剂的燃烧过程基本不受水深变化影响。推进剂燃烧结束后燃烧室压强迅速降低,直至降为环境压强,这与实验中相对应的10,30,50 m水深环境压强一致,从而进一步验证了本实验测试方案的准确性。
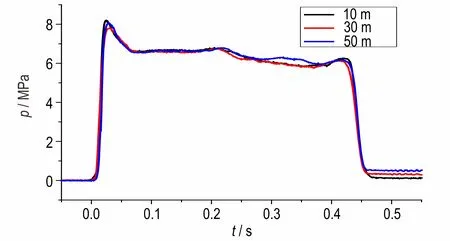
图5 不同水深下发动机1 燃烧室压强曲线Fig.5 Combustion chamber pressure curves of engine 1 at different water depths
图6a、图6b 和图6c 分别为三种实验发动机在水深10,30,50 m 工作时的推力曲线,从图中可以看出,发动机在点火初期即出现推力峰值,与燃烧室压强特征相同。对比图6a、图6b 和图6c 发现,发动机1、发动机2、发动机3 的装药燃烧时间逐渐变长,由于三种装药肉厚相同,说明发动机1、发动机2、发动机3 装药燃速逐渐减小。发动机推力存在明显周期性振荡,主要是由燃气射流内的复杂激波结构引起。随着水深的增大,发动机推力明显减小,主要是因为水深越大,燃气射流受到水环境挤压强度越大,燃气的膨胀‑压缩过程越不充分。在发动机工作的平衡段时间内对应推力的平均值称为平衡推力,发动机1在10 m 水深工作的平衡推力为2.33 kN,水深从10 m 增加到30 m 时,发动机1平衡推力降低了12%,水深从30 m 增加到50 m 时,平衡推力降低了10.7%。发动机2 工作从水深10 m 增加到50 m 时,平衡推力降低了21%。发动机3工作从水深10 m增加到50 m时,平衡推力降低了26.5%。由此可见水深对水下发动机推力有较大影响,属于非线性关系。基于实验测量结果的特点,采用指数衰减方程对水深与发动机推力的函数关系进行拟合,如图7 所示。拟合出的函数关系为F = A0+ A1e-h/A2式中,F 为发动机推力,kN;h 为发动机工作水深,m;A0、A1、A2为拟合参数,如表2 所示。
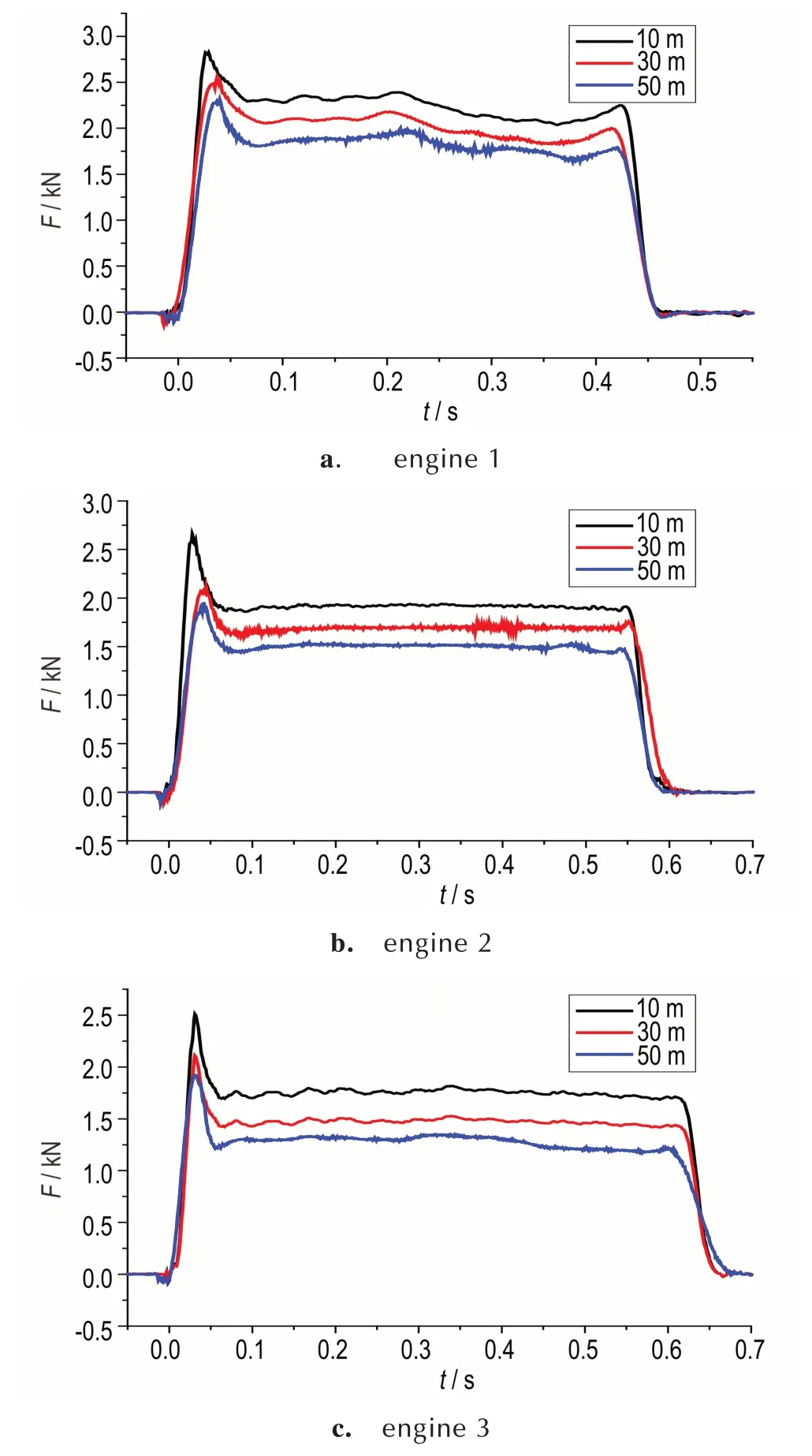
图6 3 种发动机在不同水深下的推力曲线Fig.6 Thrust curves of three engines at different water depths
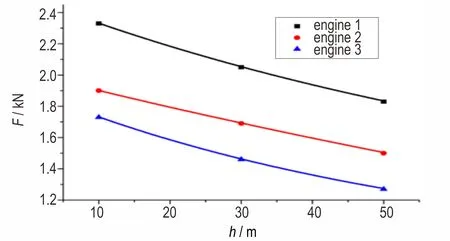
图7 水下发动机平衡推力随工作水深变化曲线Fig.7 Balanced thrust vs water depth curves of three engines at different water depths
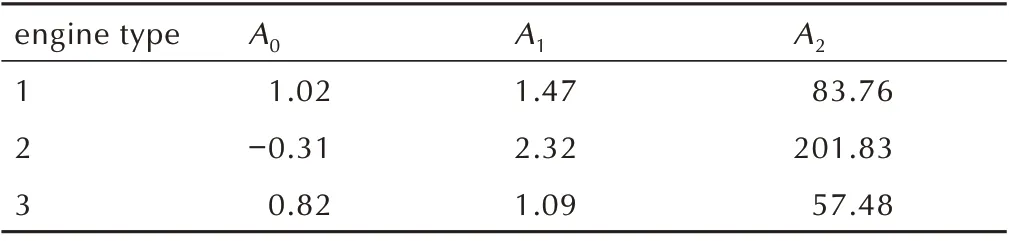
表2 发动机推力随水深变化的拟合参数Table 2 Fitting parameters for engine thrust with water depth
发动机推力拟合模型与实测值之间的误差见表3,可以看出拟合值与实测值的误差均在1%以内,说明拟合模型能够较好的反映出发动机平衡推力与水深之间的关系,为10~50 m 不同水深的发动机平衡推力预测提供理论基础。

表3 发动机推力拟合值与实测值误差Table 3 The error between the fitted value of engine thrust and the measured value
为说明发动机水下工作效率,对发动机水下工作与地面工作情况相比较,则水下发动机推力减小量定义为:

式中,Fd为地面推力,kN;Fs为水下推力,kN。

图8 水下发动机推力减小量随水深的变化曲线Fig.8 Thrust reduction of underwater engine with increase of the water depths
4 结论
利用连接船体升降平台对固体火箭发动机水下工作特性进行了实验研究,分析了水下发动机燃气射流的扩展过程,同时讨论了不同水深条件下火箭发动机的推力特性,可得出以下结论:
(1)高温高压燃气射流在水下的扩展是一个复杂的物理化学过程,初期形成扁平状的燃气泡逐渐演变为椭球体形状,射流通道内不断出现膨胀‑收缩现象。气液界面脉动剧烈,形成的混合层呈“云团”状。
(2)发动机在点火初期出现推力峰值,发动机推力随着水深增大而减小,燃烧室压强基本不变。发动机1 在10 m 水深工作的平衡推力为2.33 kN,水深从10 m 增加到30 m 时,发动机1 平衡推力降低了12%,水深从30 m 增加到50 m 时,平衡推力降低了10.7%。发动机2 工作从水深10 m 增加到50 m 时,平衡推力降低了21%。发动机3 工作从水深10 m 增加到50 m时,平衡推力降低了26.5%。
(3)随着水深的增加,发动机的推力减小量增大,在同一水深时,发动机2 的推力减小量最小,在10 m水深工作的推力减小量仅为4.5%。
