多智能体系统分布式协调控制在电力系统中的应用
2020-12-23宋天华
宋天华
(宁夏大学新华学院信息与计算机科学系,宁夏银川750021)
0 引言
控制理论可以追溯到20世纪初莱特兄弟发明飞机时,从此控制理论逐渐发展起来并受到越来越多的关注[1]。随着航空航天技术的发展,现代控制理论也得到了快速发展,同时也发展出很多控制方法,比如鲁棒控制、自适应控制、非线性控制和智能控制等[2]。多智能体系统因为其本身的优越性得到越来越广泛的应用。本文简述多智能体系统分布式协调控制问题,以及其在电力系统中的简单应用。
1 多智能体系统
人们对多智能体的关注源于科学家对自然界动物行为的研究,动物的聚集、蜂拥等问题启发了人们。多智能体系统可以通过控制相对简单的单个智能体来完成复杂的任务,并且这些任务是单个智能体无法完成的[3]。多智能体系统在电力系统、军事、游戏、交通以及机器人等方面有着广泛的应用。在军事领域,多智能体系统可以编队完成士兵无法完成的危险任务;在游戏领域,多智能体系统可应用于足球赛、舞蹈赛等;工业制造中利用机器人搬运大型货物等。
2 分布式协调控制
随着控制理论的发展,两种控制方法也逐渐发展起来。一种是集中控制,集中控制是在系统中建立一个控制中心,由统一的控制协议控制整个系统。但是这种控制属于比较简单的控制,比较适合传统的、结构简单的控制系统。另一种是分布式控制,这种控制方法就是对系统进行集中管理、分散控制,分布式控制需要一个分布式控制协议来控制系统。和集中控制相比,分布式控制可以解决因能源、带宽以及单个智能体尺寸等缺陷带来的问题,因此分布式控制在多智能体系统中得到越来越多的关注。
多智能体系统分布式协调控制主要包括一致性问题、编队问题、群集和蜂拥等[1]。其中,一致性问题是多智能体系统分布式协调控制的基础,也是研究其他问题的理论基础[4]。多智能体系统一致性问题指的是随着时间的变化,系统中的单个智能体在一致性协议的控制下最终状态趋于一致[3]。多智能体系统分布式协调控制中的编队问题不同于一致性控制最终达到一致的状态,编队问题的控制结果更加多元化,因此编队的应用也更加广泛,比如应用在无人机编队飞行、卫星编队和监视侦察等领域。2015年9月3日,在北京天安门广场举行的抗日战争胜利70周年阅兵仪式中,空中梯队编队飞行就是采用了基于领航法的编队控制。一般用图论里面的无向图和有向图给多智能体系统建立模型,每一个智能体用无向图或者有向图的顶点来表示,智能体之间的信息交流关系用图的边来表示,如图1所示。编队队形可以通过无向图或者有向图中的一个来描述,如图2所示。当两个智能体之间的信息交流是单向时,可以建立有向图的模型;当两个智能体之间的信息交流是相互的,则建立无向图的模型如图3所示。
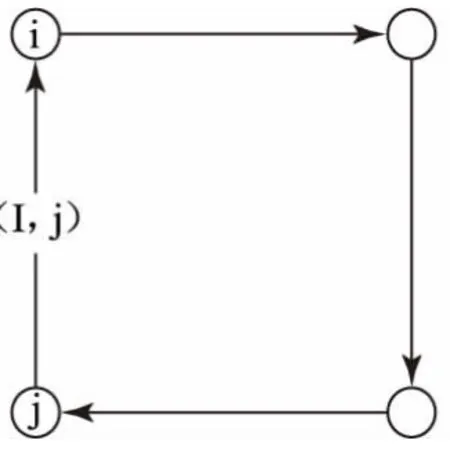
图1 图论
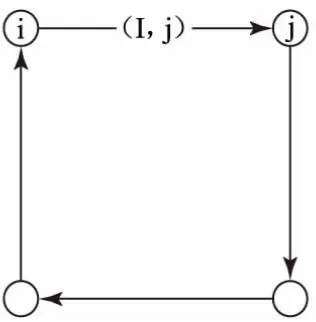
图2 有向图

图3 无向图
多智能体系统编队过程中有一个很重要的问题就是避障,这其中包括智能体之间要相互交流以防碰撞以及多智能体系统也要躲避所在场所的障碍物,场所中的障碍物又分为静态和动态,如图4和图5所示。研究多智能体系统的避障问题可以提高任务完成效率,大大节约成本[5]。
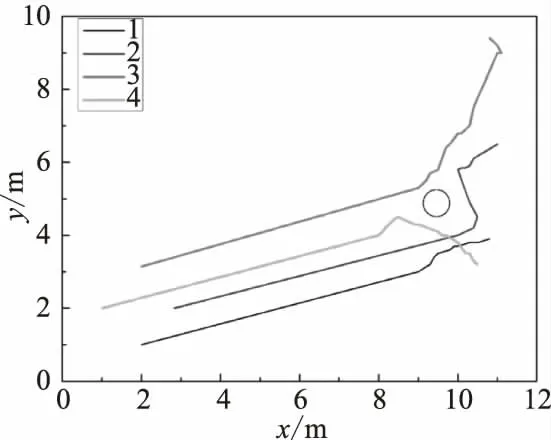
图4 静态避障

图5 动态避障
群集指的是大量个体的集合,个体和个体之间通过信息交流最终达到一致的状态。蜂拥问题是一种特殊的群集问题,蜂拥问题的最终状态是多智能体系统的个体之间距离稳定和速度相等,速度相等包括大小和方向都相等。分布式协同控制应用于多智能体系统中可以更好地展现多智能体系统的协同表现能力,同时也具有更好的灵活性、适应性和鲁棒性,因此多智能体系统的分布式协调控制得到越来越广泛的应用。
3 多智能体系统协调控制在电力系统中的简单应用
随着多智能体系统的发展,多智能体系统分布式协同控制在电力系统中的应用也越来越广泛。赵波等在2004年提出了一种在电力市场中的基于多智能体系统分布式协调控制的仿真系统[6];在中国人工智能学术年会第11届全国学术年会上,朱永利等人提出了多智能体系统在电网故障在线诊断中的应用[7],文献[8]、文献[9]提出了基于多智能体系统分布式协调控制的电力系统分布式经济调度策略和微网功率的经济分配方法。近几年新能源成为人们关注的热点,为解决现有能源问题,确保社会可持续发展,可再生能源的利用越来越广泛,文献[10]结合微电网,在多智能体系统分布式协调控制的基础上,提出了一致性算法来解决微电网中的经济分配问题,并提出了基于随时延时的一致性算法来解决微电网中通信存在随机延时的问题。
4 结语
随着电力系统的改革和发展,传统的集中控制方式已经不能满足电力系统的发展和应用需要。多智能体系统分布式协同控制鉴于其分布式控制的特点在电力系统中得到越来越广泛的应用,尤其随着智能电网的发展,多智能体系统和电力系统的结合一定会得到越来越多的关注。
